Topodrone از ادغام اسکنر Lidar Prime خود با پهپاد aOrion Heli-E که توسط حسگر Alpha Prime Velodyne فعال شده است، خبر داده است. هدف از این کار پر کردن شکاف در راهحلهای نقشه برداری مبتنی بر پهپاد بین سیستمهای هوایی سرنشین دار سنگین وزن و گران قیمت لیدار و سامانههای پهپاد سبک وزن لیدار است. این سیستم به کاربران اجازه میدهد تا برنامههای کاربردی خود را برای بررسی مناطق وسیعی که قبلاً فقط با استفاده از هواپیماهای سرنشین دار یا هلیکوپتر بررسی میشد، گسترش دهند. Topodrone یک طراح و سازنده تجهیزات Lidar با دقت بالا در سوئیس برای نصب بر روی وسایل نقلیه هوایی بدون سرنشین (پهپادها یا “پهپادها”)، وسایل نقلیه زمینی و کوله پشتی است.
سیستم Lidar Prime plus aOrion Heli-E توسط حسگر Alpha Prime، سنسور دوربرد لیدار در سطح جهانی Velodyne فعال می شود. Lidar Velodyne به همراه گیرنده GNSS درجه بررسی و واحد اندازه گیری اینرسی درجه بالا (IMU) کیفیت، محدوده کاری و قابلیت های لازم برای راه حل های نقشه برداری را برای توپودرون فراهم می کند. این سیستم به کاربران این فرصت را می دهد که ده ها کیلومتر از خطوط برق و ده ها یا حتی صدها کیلومتر مربع از یک منطقه نقشه برداری را ضبط کنند، زمانی که یک بازرسی دستی، هلیکوپتر خلبانی یا یک مولتی کوپتر خطر زیادی ایجاد می کند، بسیار پرهزینه است یا قادر به مقابله با چالش نیست.
Lidar Prime یک سیستم Topodrone Lidar با برد کاری تا 300 متر است که عرض کریدور 500 متر و بیش از 20 کیلومتر مربع در هر پرواز با هلیکوپتر aOrion را پوشش می دهد. به لطف توانایی aOrion برای حمل محموله 5 کیلوگرمی برای بیش از 1.5 ساعت، نقشهبردار میتواند از ابرهای نقطه لیدار با دقت بالا و عکسهای اورتوفوتو خطوط برق طولانی، جادهها و مناطق جنگلی عظیم بگیرد.
در عین حال، طیف گسترده ای از سرعت های کروز (از 7 تا 20 متر بر ثانیه) و انعطاف پذیری برای انتخاب ارتفاعات مختلف پرواز (از چند متر تا صدها متر از سطح زمین) امکان استفاده از تمام محدوده توپودرون لیدار با دقت بالا را فراهم می کند. سیستم ها همراه با دوربین 61 مگاپیکسلی. این از دستیابی به مجموعه داده های دقیق برای نظارت سه بعدی، کارهای کاداستر، طراحی ساخت و ساز جدید، نظارت بر جنگل و اکتشاف پشتیبانی می کند.
Topodrone Lidar Hi-Res بر روی بالگرد aOrion Heli-E.
انجام پرواز و پردازش داده ها
راه حل Lidar Prime plus aOrion Heli-E آسان است. قبل از پرواز، نقشه بردار به سادگی باید باتری های هلیکوپتر را در یک ایستگاه شارژر مخصوص شارژ کند، یک مأموریت بررسی خطی یا منطقه ای را با در نظر گرفتن سطح زمین آماده کند و پرواز را در حالت خودکار اجرا کند. دوربین همگام شده 61 مگاپیکسلی سیستم Topodrone Lidar که روی هلیکوپتر نصب شده است، ابرهای نقطه ای و عکس هایی را برای پردازش داده های آینده می گیرد.
پس از پرواز، نقشه بردار تمام مجموعه داده ها را دانلود می کند و به عنوان اولین گام نرم افزار پس پردازش Topodrone را اجرا می کند تا مسیر دقیق پرواز را به دست آورد و ابرهای نقطه لیدار را در عرض چند دقیقه تولید کند. این نرم افزار نه تنها مراحل اولیه پردازش داده ها را تسهیل می کند، بلکه تراز کردن نوار و کالیبراسیون لیدار را نیز تسهیل می کند. در نتیجه، کاربران ابرهای نقطه لیدار جغرافیایی مرجع آماده برای استفاده را در حالت خودکار برای تجزیه و تحلیل آینده، استخراج زمین، تولید خطوط خطوط و استخراج لایههای CAD دریافت خواهند کرد.
سیستم های لیدار مزایای متعددی از جمله امکان کار در عصر بدون نور خورشید یا حتی در شب و گرفتن زمین در زیر پوشش گیاهی عمیق در ترکیب با زمان پرواز طولانی را ارائه می دهند. در نتیجه، سیستمهای لیدار به طور قابلتوجهی قابلیتهای شرکتهای نظرسنجی را گسترش میدهند و در بسیاری از ساعات کار و هزینهها صرفهجویی میکنند. این آنها را قادر میسازد تا با سیستمهای بزرگ Lidar مبتنی بر هوا که میتوانند تا صد برابر بیشتر از هلیکوپترهای برقی با تجهیزات کوچک و مدرن Topodrone Lidar در هواپیما، قیمت داشته باشند، رقابت کنند.
باستان شناسان ده ها سال است که روی Sand Canyon Pueblo در کلرادو، ایالات متحده آمریکا مطالعه می کنند. امروزه نقشه برداری و تجسم سنتی پر زحمت دیگر برای مطالعات دقیق کافی نیست. بررسی ترکیبی از یک سیستم هوایی بدون سرنشین (UAS) با لیدار نشان داده است که چگونه ابرهای نقطه ای دقیق و متراکم امکان کشف سازه هایی که قبلاً مستند نشده بودند را میسر می سازد. با این حال، همانطور که نویسنده به طور قانع کننده ای نشان می دهد، انجام یک نظرسنجی UAS Lidar نیازمند دانش و مهارت های کامل است.
دره های یادبود ملی باستانی در کلرادو، ایالات متحده، یک چشم انداز باستان شناسی مهم است که حاوی منابع تاریخی و زیست محیطی فراوانی است. این منطقه اکنون یک نقطه تفریحی است، اما در حدود سال 1240 پس از میلاد این منطقه توسط جامعه پوئبلو اشغال شد، که بیش از 70 روستا را ساخت که حدود 30000 نفر در آن ساکن بودند. تنها در سند کانیون، بیش از 90 سازه زیرزمینی معروف به “کیوا” توسط خانواده ها به عنوان سکونت مورد استفاده قرار گرفت.
بین سال های 1984 و 1995، سایت مورد مطالعه، نقشه برداری و کاوش با استفاده از تکنیک های سنتی بررسی قرار گرفت. Routescene Inc. برای نقشهبرداری دقیقتر از این سایت غنی از نظر فرهنگی، که توسط دفتر مدیریت زمین مدیریت میشود، با مشارکت Caddis Aerial برای ایجاد یک مدل زمین دیجیتال زمین برهنه دقیق (DTM) همکاری کرد. این رویکرد بر اساس یک سیستم Lidar – که می تواند در پوشش گیاهی متراکم نفوذ کند و تراکم های بالا ایجاد کند – بر روی یک هواپیمای بدون سرنشین (UAV یا “پهپاد”) نصب شده بود.
پهپاد
DJI M600 Pro به دلیل پایداری و ظرفیت بالابری آن به عنوان پلتفرم انتخاب شد. این پهپاد بسته به باد و سایر شرایط آب و هوایی می تواند مدت زمان پروازی بین 15 تا 20 دقیقه داشته باشد و در یک پرواز مساحت حداقل 400×400 متر را به تصویر می کشد و کاربران را قادر می سازد تا مناطق بیش از دو کیلومتر مربع در روز را بررسی کنند. LidarPod Routescene که در سال 2013 برای استفاده در پهپادها طراحی شده است شامل مجموعه ای از حسگرها از جمله Velodyne HDL32 است.
با سرعت اسکن تا 1.4 میلیون نقطه در ثانیه از 32 لیزر مختلف که در یک میدان دید 40 درجه زاویه دارند، این امکان نفوذ بالای پوشش گیاهی را فراهم می کند. مودم رادیویی داخلی نه تنها فرمان و کنترل را قادر میسازد، بلکه و مهمتر از آن، عملیات – کامل با نظارت بر تضمین کیفیت (QA) در زمان واقعی – را در فاصله بیش از 2 کیلومتر امکانپذیر میکند.
نقطه برخاستن در جاده خاکی اصلی در شمال منطقه امکان دید کافی را تا لبه های بیرونی منطقه فراهم می کند (شکل 1). این پهپاد در ارتفاع 40 متری نسبت به نقطه برخاستن پرواز کرد. ارتفاع در مرزهای غربی و شرقی به دلیل موج دار بودن زمین 20 متر و در جنوب به دلیل صخره های شیب دار 60 متر بود. برای دستیابی به تراکم نقطه DTM بسیار بالا، پهپاد با سرعت 5 متر بر ثانیه به پایین ترین حد ممکن پرواز کرد.
تنظیم همپوشانی بین خطوط پرواز مجاور روی 100٪ به این معنی است که هر قطعه زمین دو بار بررسی شده است، که منجر به تراکم نقطه بالاتر و برخورد نقاط لیزر بیشتری به زمین می شود. طرح پرواز از برنامه GS Pro DJI در پهپاد آپلود شد.
M600 Pro به صورت دستی برای شروع ماموریت پرواز کرد و برنامه پرواز از داخل برنامه GS Pro اجرا شد. برای اهداف ژئوارفرانس دقیق، هشت نقطه کنترل زمینی (GCPs) با GNSS اندازهگیری شد و اهداف لیدار با قطر 60 سانتیمتر که بر روی سهپایهها نصب شده بودند، روی آنها قرار گرفتند (شکل 2).
به لطف مواد بسیار بازتابنده آنها، اهداف به راحتی در ابر نقطه قابل شناسایی بودند. پس از هر ماموریت، داده ها از LidarPod دانلود شده و با استفاده از LidarViewer Pro بازرسی می شوند. این نرمافزار اختصاصی کاربر را قادر میسازد تا با استفاده از Filter Development Toolkit برای توسعه و اعمال فیلترها، یک گردش کار پردازش Lidar ایجاد کند.
شکل 2: هدف لیدار در بالای یک GCP (سمت چپ)، با GNSS اندازه گیری شده است.
شرایط پرواز
این بررسی در اکتبر 2018 انجام شد. دما در اوایل صبح بین 15 تا 20 درجه سانتیگراد بود که در طلوع خورشید 5 درجه افزایش یافت. برنامه ریزی ماموریت پهپاد باید ارتفاع 2100 متری را در نظر می گرفت زیرا با افزایش ارتفاع پرواز و همچنین به دلیل شرایط جوی مانند دما و رطوبت، عملکرد هواپیما کاهش می یابد. ارتفاع پرواز و شرایط جوی در ارتفاع به اصطلاح چگالی ترکیب می شوند.
هوای سرد صبحگاهی منجر به تراکم ارتفاع 2750 تا 3050 متر شد. علاوه بر ارتفاع تراکم، چالش های دیگر شامل خلبانی یک هواپیمای تازه خریداری شده و محموله بود. 40 درصد از ظرفیت باتری پس از تکمیل خط پرواز فعلی باقی ماند و پهپاد پس از آن به محل برخاستن پرواز کرد و معمولاً با 30 درصد ظرفیت فرود آمد. این حاشیه ایمنی سخاوتمندانه به عنوان یک رویکرد معقول در نظر گرفته شد. وزش باد در اواسط صبح تمایل داشت که شرایط پرواز را چالش برانگیزتر کند. با این حال، چهار پرواز با موفقیت انجام شد و آخرین خط پرواز درست قبل از تقویت بیشتر باد و فراتر از محدودیت های عملیاتی به پایان رسید.
تله
از آنجایی که همیشه این احتمال وجود دارد که دادههای اضافی در تاریخ بعدی – چه برنامهریزیشده یا برنامهریزی نشده – جمعآوری شوند، پیشبینی این امر با علامتگذاری همه GCPها با استفاده از یک میخ دائمی که به زمین میخورد، یک روش استاندارد است. بررسی مجدد در اواسط زمستان انجام شد، زمانی که GCPs زیر 30 سانتی متر از پوشش برف مدفون شدند. تجزیه و تحلیل داده ها اختلافی را در موقعیت GCP ها نسبت به ابر نقطه نشان داد.
تجزیه و تحلیل بیشتر بیشتر نشان داد که خطاها به دلیل ذخیره مختصات GCP در مایکروسافت اکسل ایجاد شده است که همه اعداد را تا شش رقم اعشار گرد می کند. برای مختصات جغرافیایی این یک عدم دقت تا 4 متر معرفی کرد. بنابراین یک کلمه احتیاط: مراقب نحوه جمع آوری و ذخیره داده های نظرسنجی باشید! بارگذاری مجدد داده های خام اصلی در قالب دیگری مشکل را حل کرد، اما نقشه برداران زمین نسبتاً ناراضی بودند. درسی که گرفت!
شکل 3: ابر نقطه UAS Lidar شامل بیش از 3.2 میلیارد نقطه.
نتایج
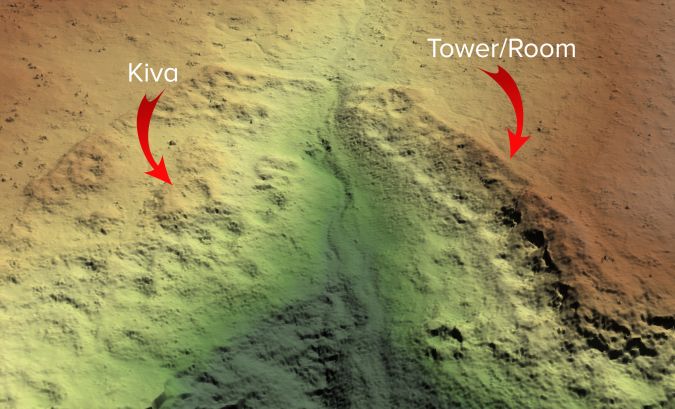
بیش از 3.2 میلیارد امتیاز جمع آوری و پردازش شد (شکل 3). فیلترهای مورد استفاده در یک توالی خودکار عبارتند از کاهش بخش، کاهش شناسه لیزری، تبدیل مختصات، ایجاد شبکه، “ابزار زمین برهنه” ساخته شده، یک شبکه اسکیم و در نهایت فیلتر صادرات LAS. این فرآیند عملاً تمام پوشش گیاهی را از ابر نقطه حذف کرد تا ساختارهایی را که باستان شناسان به آن علاقه مند بودند به تفصیل در معرض دید قرار دهد. کیواهای بدون سند و سازه های دیگر (شکل 4). این نتایج، که بدون بررسی های زمینی پر زحمت به دست آمدند، دقیق هستند و به باستان شناسان اجازه می دهند تا کارهای آینده خود را بر روی سازه های تازه یافته متمرکز کنند.
شکل 4: DTM زمین برهنه ساختارهایی را که قبلاً مستند نشده بودند نشان داد.
Teledyne Geospatial Optech CLS-A را معرفی کرده است، یک پهپاد جدید با درجه نظرسنجی Lidar و سیستم دوربین. محدودیت های عملیات پهپاد Optech CLS-A برای کاربردهای نقشه برداری و بازرسی با کیفیت بالا توسعه داده شده است که در آن ادغام دقیق یک لیزر واگرایی پرتو باریک قدرتمند، IMU با دقت بالا، دوربین کالیبره شده و نرم افزار قدرتمند پس از پردازش، جمع آوری کارآمد منطقه وسیع را در مقررات مجاز فراهم می کند.
Optech CLS-A اسکنر CL-360XR Lidar را با واگرایی پرتو 0.3 میلیرادی پیشرو در صنعت، میدان دید 360 درجه و دقت و صحت در درجه بررسی ادغام میکند. CL-360XR جمع آوری داده های توپوگرافی Lidar را از ارتفاع 120 متری یا بالاتر از طریق زمین های با پوشش گیاهی و ارتفاعات متنوع امکان پذیر می کند. Lidar با یک دوربین دیجیتال شاتر جهانی با میدان دید 80 درجه کالیبره شده جفت می شود که رنگ آمیزی و بازرسی با وضوح بالا را امکان پذیر می کند. دادههای جمعآوریشده با سیستمهای Optech CLS-A، ALTM Galaxy و Lynx میتوانند به طور همزمان از طریق یک گردش کار مشترک در Optech LMS Professional پردازش شوند.
بررسی های مهندسی سطح سخت
بسته به ترجیح کاربر، CLS-A را می توان به راحتی در انواع پلتفرم های پهپاد ادغام کرد. این ادغام را می توان با قدرت کم، یک پایه مکانیکی ایزوله و یک آنتن GNSS تکمیل کرد. CLS-A برای ارائه نتایج با کیفیت بالا برای کاربردهایی مانند بررسی های مهندسی سطح سخت، مدیریت پوشش گیاهی کاربردی، بررسی های توپوگرافی، نظارت راهروها، جاده ها/روسازی ها، راه آهن، جنگلداری، ساخت و ساز، معدن و باستان شناسی طراحی شده است.
ما بسیار هیجانزده هستیم که اولین راهحل Lidar Teledyne Geospatial را معرفی کنیم که دادههای درجه نظرسنجی را از یک پلت فرم پهپاد ارائه میدهد. Mark Treiber، مدیر محصول، Autonomous Solutions در Teledyne Optech، اظهار داشت که Optech CLS-A بدون زحمت در جریان های کاری پس از پردازش ALTM Galaxy و Lynx قرار می گیرد تا سخت ترین الزامات کیفیت داده را برآورده کند.
فناوری Lidar GeoSLAM برای نقشهبرداری از جنگلها به عنوان بخشی از جنگل هوشمند مرکز نوآوری مبتنی بر پژوهش (SFI) در Ås، نروژ استفاده میشود. SFI SmartForest میخواهد بخش جنگلداری نروژ را در خط مقدم پیشرفتهای تکنولوژیکی و صنعت 4.0 قرار دهد.
Industry 4.0 پیشرفتهایی را در فنآوریهای دیجیتال و تولید توصیف میکند که روندها را به سمت آیندهای قابل همکاری سوق میدهد که با درجه بالایی از همکاری، جریان آزاد اطلاعات و ارتباطات بلادرنگ مشخص میشود. اگرچه Industry 4.0 هنوز در مراحل ابتدایی خود است، اولین پذیرندگان کارخانه های هوشمند – یا، در این مورد، جنگل های هوشمند – می توانند مزایای اتصال متقابل را ببینند.
SFI SmartForest به رهبری موسسه تحقیقات اقتصاد زیستی نروژی (NIBIO) قصد دارد صنعت 4.0 را در یک دوره هشت ساله به جنگلداری برساند. هدف اصلی بهبود کارایی بخش جنگلداری نروژ با ایجاد تحول دیجیتال با استفاده از فناوری های نوآورانه است. اهداف افزایش بهره وری، کاهش اثرات زیست محیطی و بررسی سایر مزایای آب و هوایی قابل توجه است.
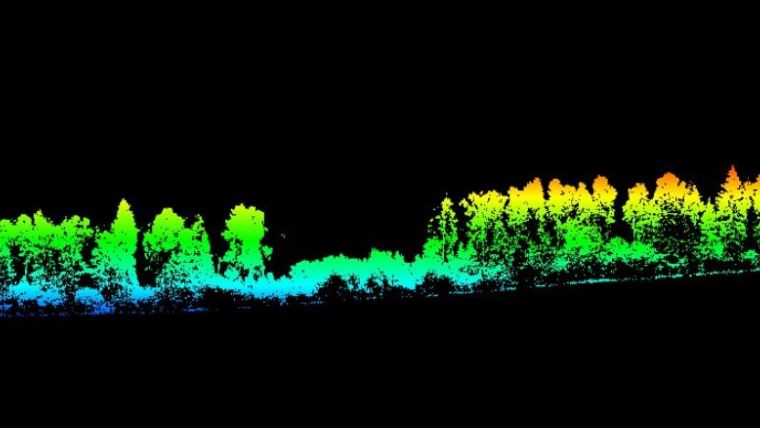
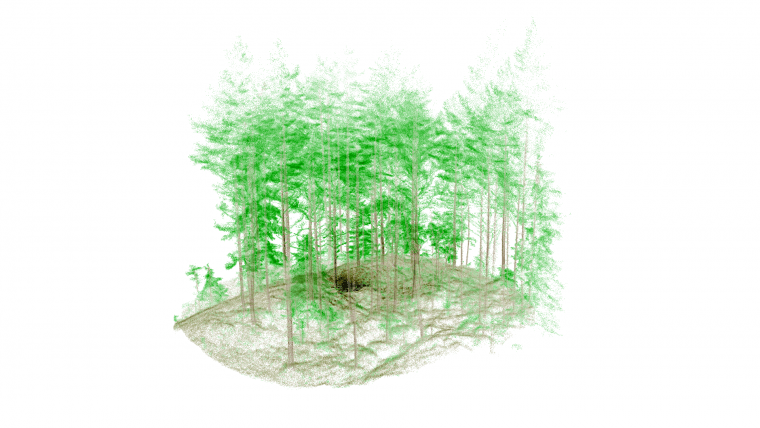
SmartForest با تمرکز بر جنگلکاری، عملیات جنگلها، تامین چوب و جریان اطلاعات دیجیتالی کلی، در حال سرمایهگذاری بر روی فناوریهای توانمند معقول – مانند حسگرهای دستی Lidar – برای کمک به دستیابی به اهداف خود است. یکی از این راه حل های Lidar، اسکنر لیزری GeoSLAM ZEB Horizon است.
ترکیب اسکن لیزری دستی و پهپاد پیادهروی و اسکن با ZEB Horizon دادهها را از زیر سایهبان جنگل میگیرد. این اسکنر با پخش 300000 نقطه لیزر در ثانیه با برد تا 100 متر، مدل های سه بعدی متراکم از مناطق بزرگ را در مدت زمان کوتاهی تولید می کند. داده های دقیق ابر نقطه ای شامل کف جنگل، زباله ها، تنه درختان و پوشش گیاهی ضخیم است. در صورت نیاز، پهپادها پوشش گیاهی سنگین تاج پوشش جنگل را می گیرند و هر دو مجموعه داده را ادغام می کنند.
این تیم به سرپرستی راسموس آستروپ، مدیر مرکز، به طور منظم دادههای ابر نقطهای را در زمینهایی به مساحت 250 متر مربع، با جاهطلبی بیشتر برای اسکن مناطق بزرگتر در آینده، ضبط میکند. جمعآوری مکرر دادهها بخش مهمی از برنامههای SmartForest است و اسکنرهای دستی Lidar GeoSLAM در کنار جمعآوری دادههای پهپاد به این امر کمک میکنند. ZEB Horizon توسعه داده شده است تا جمعآوری دادهها را به یک کار ساده و قابل تکرار برای راسموس و تیمش تبدیل کند و دادههای با دقت بالا پایهای برای مدلهای یادگیری عمیق فراهم میکند.
تقسیمبندی خودکار تنههای درخت امکان شمارش آسانتر را فراهم میکند و فهرست دقیق جنگلها را تا هر درختی فراهم میکند. تقسیم بندی منجر به استخراج ویژگی هایی برای درختان خاص مانند کیفیت چوب، زیست توده و سایر متغیرهای مرتبط با محیط زیست برای نظارت بر سلامت جنگل می شود.
استفانو پولیتی، دانشمند تحقیقاتی در NIBIO، درباره این اسکنر گفت: «سرعتی که ZEB Horizon دادهها را جمعآوری میکند، کل گردش کار را برای شرکتها بسیار ساده و جذاب میکند، زیرا باعث صرفهجویی در وقت آنها میشود. این یک راه کارآمد برای جمع آوری حقیقت است که به ما برتری می دهد. در نهایت، ما می خواهیم از آن برای برنامه های نقشه برداری در مقیاس بزرگ استفاده کنیم.
این پروژه هنوز در مراحل اولیه است، اما SmartForest در حال حاضر به دنبال کاربردهای بالقوه دیگر برای اسکنر ZEB Horizon GeoSLAM است و تطبیق پذیری راه حل دستی Lidar را تصدیق می کند.
پروژه AUAV در آلمان تنظیم بلوک بسته نرم افزاری فتوگرامتری را با ارجاع جغرافیایی مستقیم ابرهای نقطه Lidar یکپارچه کرده است تا دقت مربوطه را به میزان قابل توجهی بهبود بخشد.
سکوهای اخیر وسایل نقلیه هوایی بدون سرنشین (UAV یا “پهپاد”) به طور مشترک تصاویر و داده های Lidar را جمع آوری می کنند. ارزیابی ترکیبی آنها به طور بالقوه ابرهای نقطه سه بعدی را با دقت و وضوح چند میلی متری ایجاد می کند که تا کنون محدود به جمع آوری داده های زمینی است. این مقاله پروژه ای را تشریح می کند که تنظیم بلوک بسته نرم افزاری فتوگرامتری را با ارجاع جغرافیایی مستقیم ابرهای نقطه لیدار ادغام می کند تا دقت مربوطه را با یک مرتبه قدر بهبود بخشد. مزایای دیگر پردازش ترکیبی ناشی از افزودن اندازهگیری محدوده Lidar به تطبیق تصویر چند نمای استریو (MVS) در طول تولید ابرهای نقطه سهبعدی متراکم با دقت بالا است.
این پروژه با هدف نظارت بر منطقه فرونشست احتمالی حدود 10 میلی متر در سال توسط مجموعه ای مکرر از ابرهای نقطه سه بعدی بسیار دقیق و متراکم انجام شد. اندازه قابل توجه محل آزمایش در Hessigheim، آلمان، از جمع آوری داده های زمینی جلوگیری می کند. همانطور که در شکل 1 قابل مشاهده است، سایت شامل مناطق ساخته شده، مناطق استفاده کشاورزی و یک قفل کشتی به عنوان ساختار مورد علاقه خاص است.
شکل 1: منطقه آزمایش در رودخانه Neckar در Hessigheim، آلمان.
برای نظارت سنتی، شبکه ای از چندین ستون در مجاورت قفل ایجاد شد. همانطور که در شکل 2 نشان داده شده است، اهداف فتوگرامتری به ستون ها علامت می دهند تا آنها را به عنوان نقاط کنترل و کنترل برای ارجاع جغرافیایی در دسترس قرار دهند. برای جمع آوری داده های پهپاد، یک هشت کوپتر RIEGL RiCopter مجهز به سنسور RIEGL VUX-1LR Lidar و دو دوربین سونی آلفا 6000 مایل استفاده شد. با ارتفاع اسمی پرواز 50 متر از سطح زمین، فاصله نوار 35 متر و میدان دید اسکنر (FoV) 70 درجه، سیستم 300-400 نقطه بر متر مربع در هر نوار و 800 نقطه در متر مربع برای کل بلوک پرواز را ثبت کرد.
به دلیل همپوشانی طرف اسمی 50٪. پارامترهای ماموریت پرواز منجر به قطر ردپای لیزری روی زمین کمتر از 3 سانتیمتر با فاصله نقطهای 5 سانتیمتر شد. دامنه نویز اسکنر 5 میلی متر است. مسیر پلت فرم توسط یک سیستم GNSS/IMU پهپاد APX-20 اندازه گیری شد تا امکان ارجاع جغرافیایی مستقیم فراهم شود. دو دوربین سونی آلفا 6000 مایل که بر روی پلتفرم RiCopter نصب شدهاند، هر کدام فو وی 74 درجه دارند. آنها با زاویه دید 35± درجه به طرفین، تصاویر را در فاصله نمونه برداری از زمین (GSD) 1.5-3 سانتی متر با هر کدام 24 مگاپیکسل ثبت کردند.
شکل 2: هدف فتوگرامتری روی ستون.
تنظیم نوار لیدار و مثلث بندی خودکار هوایی
پس از ارجاع جغرافیایی مستقیم، یک گردش کار معمولی Lidar شامل تنظیم نوار برای به حداقل رساندن تفاوت بین نوارهای همپوشانی است. این مرحله با تخمین کالیبراسیون نصب اسکنر و همچنین پارامترهای تصحیح برای راه حل مسیر GNSS/IMU، ارجاع جغرافیایی را بهبود می بخشد. به طور معمول، یک افست ثابت (Δx، Δy، Δz، Δroll، Δpitch، Δyaw) برای هر نوار تخمین زده می شود. از طرف دیگر، اصلاحات وابسته به زمان برای هر یک از این شش پارامتر را می توان با splines مدل کرد.
شکل 3 به طور مثال یک صفحه کنترل زمینی لیدار را نشان می دهد که برای ارجاع جغرافیایی مطلق استفاده می شود. هر سیگنال دارای دو صفحه سقف مانند در ابعاد 40 × 80 سانتی متر با موقعیت و جهت مشخص است. ارزیابی تنظیم نوار لیدار این پروژه بهعلاوه ستونهای علامتدار نشاندادهشده در شکل 2 را اعمال میکند. این اهداف فتوگرامتری، تفاوت ارتفاعی را به ابر نقطه ژئورنفرانس شده در 33 هدف ارائه میکنند.
در بررسی ها، این تفاوت ها منجر به دقت RMS 5.2 سانتی متری شد. برای فعال کردن ارجاع جغرافیایی بلوک تصویر مورب سونی آلفا توسط مثلث هوایی خودکار (AAT)، شش هدف فتوگرامتری به عنوان نقاط کنترل زمینی (GCPs) انتخاب شدند. 27 هدف باقیمانده در نقاط بازرسی مستقل (CPs) بین 5.2 سانتی متر (حداکثر) و 1.2 سانتی متر (حداکثر) با RMS 2.5 سانتی متر تفاوت داشتند.
شکل 3: هواپیمای کنترل لیدار.
بنابراین، نه تنظیم نوار لیدار و نه تنظیم بلوک بسته، دقت نقطه شی 3 بعدی مورد نیاز را در طول ارزیابی مستقل دادههای حسگر مختلف به دست نمیآورند. با این حال، در صورتی که هر دو مرحله توسط به اصطلاح ژئورفرجنس هیبریدی ادغام شوند، دقت به طور قابل توجهی بهبود می یابد (Glira 2019).
ارجاع جغرافیایی ترکیبی لیدار و تصاویر هوایی
شکل 4 بخشی از نقاط Lidar پروژه را به تصویر می کشد که با مقدار شدت کد رنگی شده است. نقاط سفید پوشانده شده نشان دهنده نقاط پیوند از تنظیم بلوک بستهای از تصاویر سونی آلفا هستند. معمولاً، این مرحله پارامترهای دوربین مربوطه را از روی مختصات پیکسلی مربوط به تصاویر همپوشانی تخمین میزند. مختصات شی این نقاط پیوند فقط یک محصول جانبی هستند.
در مقابل، ارجاع جغرافیایی ترکیبی این مختصات نقطه اتصال را برای به حداقل رساندن تفاوت آنها با نقاط Lidar مربوطه اعمال می کند. این فرآیند اصلاحات وابسته به زمان مسیر پرواز را شبیه به تنظیم سنتی نوار لیدار تخمین می زند. در این مرحله، مختصات نقطه کراوات، محدودیتهای هندسی را از AAT اضافه میکنند. این محدودیت های قابل توجهی را از بلوک تصویر برای اصلاح هندسه اسکن Lidar فراهم می کند.
این امر به ویژه در صورتی مفید است که هر دو سنسور بر روی یک پلت فرم پرواز کنند و بنابراین مسیر یکسانی داشته باشند. ارجاع جغرافیایی ترکیبی علاوه بر این اطلاعات مربوط به نقاط کنترل زمینی مورد استفاده در هنگام تنظیم بلوک بسته را باز می کند. بنابراین، ارجاع جغرافیایی دادههای لیدار دیگر نیازی به هواپیماهای کنترلی اختصاصی لیدار ندارد. درعوض، تمام اطلاعات مربوط به نقطه چک و نقطه کنترل مورد نیاز از اهداف فتوگرامتری استاندارد موجود است که از اهمیت عملی بالایی برخوردار است.
شکل 4: نقاط لیدار رنگ شده با شدت و نقاط اتصال فتوگرامتری (سفید).
نویسندگان از یک اسپلاین انعطاف پذیر به عنوان یک مدل قدرتمند برای تصحیح مسیر استفاده کردند. این انعطاف پذیری به طور بالقوه می تواند منجر به تغییر شکل های سیستماتیک در صورت اعمال در طول تنظیم استاندارد نوار شود. در مقابل، یکپارچهسازی اطلاعات از فریمهای تصویر دوبعدی پایدار که در طول تنظیم بلوک بستهبندی جهتگیری شدهاند، به طور قابل اعتمادی از چنین اثرات منفی جلوگیری میکند.
شکل 5 نتیجه رویکرد ترکیبی از نرم افزار OPALS مورد استفاده را نشان می دهد. شش GCP که با دایرههای قرمز مشخص شدهاند و 27 هدف باقیمانده که بهعنوان CP استفاده میشوند، با AAT که قبلاً مورد بحث قرار گرفت، منطبق هستند. برای ژئو ارجاع هیبریدی، اختلاف ارتفاع – حداقل 1.5 سانتی متر، حداکثر 0.7 سانتی متر و میانگین 0.4- سانتی متر است. انحراف استاندارد مربوطه 0.6 سانتی متر به وضوح نشان می دهد که دقت زیر سانتی متر اکنون امکان پذیر است.
ابرهای نقطه ای ترکیبی از Lidar و استریو چند نمای
نقاط اتصال فتوگرامتری همانطور که در شکل 4 نشان داده شده است فقط یک محصول جانبی از تنظیم بلوک بسته نرم افزاری هستند، زیرا ابرهای نقطه سه بعدی متراکم توسط MVS در مرحله بعدی ارائه می شوند. در اصل، دقت هندسی ابرهای نقطه MVS به طور مستقیم با GSD و در نتیجه مقیاس تصاویر مربوطه مطابقت دارد. این اجازه می دهد تا داده های سه بعدی را حتی در محدوده زیر سانتی متری برای وضوح تصویر مناسب ضبط کنید. با این حال، تطبیق تصویر استریو، دید نقاط شی را در حداقل دو تصویر فرض میکند.
این می تواند یک مشکل برای ساختارهای سه بعدی بسیار پیچیده باشد. در مقابل، اصل اندازهگیری قطبی حسگرهای لیدار زمانی سودمند است که ظاهر جسم با مشاهده از موقعیتهای مختلف به سرعت تغییر کند. این امر برای اشیاء نیمه شفاف مانند پوشش گیاهی یا میله های جرثقیل (نگاه کنید به شکل 4)، برای اجسام در حال حرکت مانند وسایل نقلیه و عابران پیاده، یا در دره های بسیار باریک شهری و همچنین در محل های ساخت و ساز صادق است.
یکی دیگر از مزایای لیدار پتانسیل اندازه گیری پاسخ های متعدد سیگنال های منعکس شده است که نفوذ پوشش گیاهی را امکان پذیر می کند. از سوی دیگر، افزودن بافت تصویر به ابرهای نقطه لیدار هم برای تجسم و هم برای تفسیر سودمند است. در ترکیب با قابلیت رزولوشن بالا MVS، این از استدلال برای ادغام مناسب Lidar و MVS در طول تولید ابر نقطه سه بعدی پشتیبانی می کند.
شکل 5: اختلاف ارتفاع ابر نقطه لیدار تا اهداف علامت دار. GCP ها به صورت دایره های قرمز علامت گذاری می شوند.
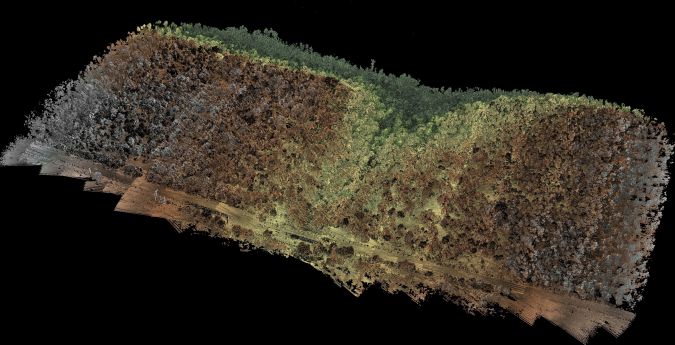
شکل 6 یک مش بافت سه بعدی را نشان می دهد که از تصاویر سونی آلفا توسط خط لوله MVS در نرم افزار SURE از nFrames ایجاد شده است. همانطور که در شکل 7 مشاهده می شود، جزئیات هندسی بسیار بیشتری در دسترس است، به عنوان مثال. در بالای کلیسا و در پوشش گیاهی پس از داده های Lidar یکپارچه شده است. شمارش چهره معمولاً با پیچیدگی هندسی سازگار است، که برای بخش کوچک برج کلیسا نیز قابل مشاهده است. به عنوان مثال، شکل 6 شامل تقریباً 325000 چهره است، در حالی که شکل 7 دارای 372000 مثلث است.
شکل 6: مش 3 بعدی بافت از MVS.
شکل 7: مش سه بعدی بافت از Lidar و MVS.
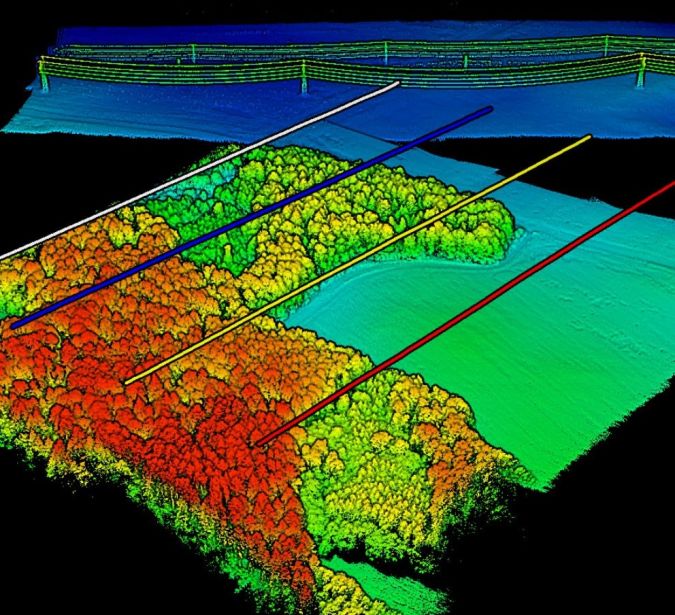
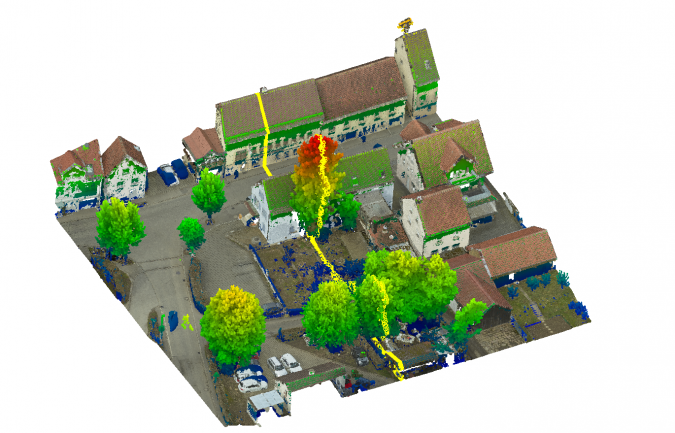
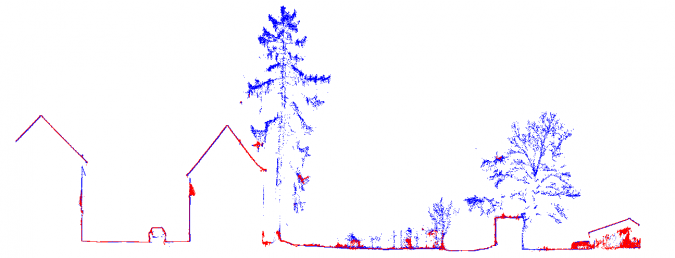
شکل 8 و 9 ویژگی های مکمل Lidar و MVS را برای نقاط سه بعدی در قسمت دیگری از محل آزمایش نشان می دهد. شکل 8 نقاط RGB رنگ تولید شده توسط MVS را نشان می دهد. داده های Lidar روی هم پوشانده شده با توجه به ارتفاع مربوطه کد رنگی می شوند. در نهایت، خط زرد نمایانگر نمایه ای است که برای استخراج نقاط نشان داده شده در شکل 9 استفاده می شود. اختلاف بین ابرهای نقطه از MVS (قرمز) و لیدار (آبی) به ویژه در درختان مشهود است، جایی که Lidar امکان تشخیص بازگشت های متعدد را در امتداد یک مسیر تک پرتو لیزری نشان می دهد.
در حالی که ابرهای نقطه ای همانطور که در شکل های 8 و 9 نشان داده شده است مجموعه ای نامرتب از نقاط هستند، مش ها همانطور که در شکل های 6 و 7 نشان داده شده اند نمودارهایی هستند که از رئوس، لبه ها و وجوه تشکیل شده اند که اطلاعات مجاورت صریح را ارائه می دهند. تفاوت اصلی بین مش ها و ابرهای نقطه ای در دسترس بودن بافت با وضوح بالا و تعداد کمتر موجودیت ها است.
این به ویژه برای تفسیر خودکار بعدی مفید است. به طور کلی، بسیاری از نقاط (Lidar) را می توان با یک چهره مرتبط کرد. نویسندگان از این رابطه چند به یک برای تقویت چهرهها با ویژگیهای متوسط Lidar که از نقاط مرتبط مربوطه مشتق شدهاند، استفاده کردند.
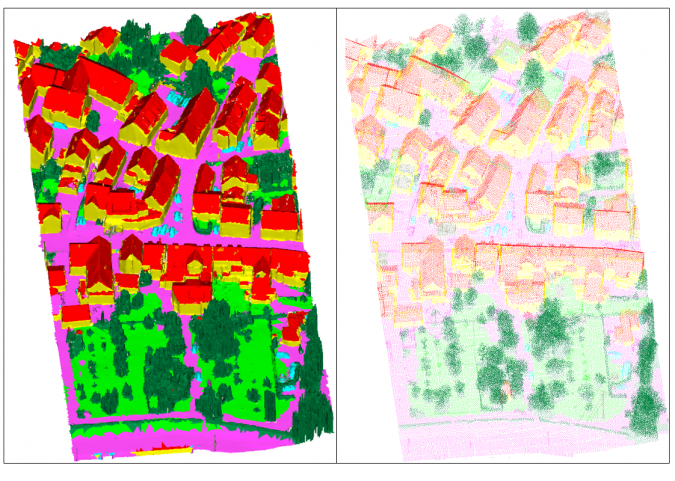
این آنها را قادر می سازد تا اطلاعات ذاتی هر دو حسگر را در نمایش مش به منظور دستیابی به بهترین تقسیم بندی معنایی ممکن یکپارچه کنند. شکل 10 مش برچسبگذاریشده را که توسط طبقهبندیکننده PointNet++ پیشبینی شده بود (سمت چپ) و برچسبهای منتقل شده به ابر نقطه متراکم Lidar (راست)، نشان میدهد که توسط فاکتور 20 برای تجسم نمونهبرداری شده است.
کد رنگ کلاس زیر استفاده می شود: نما (زرد)، سقف (قرمز)، سطح غیر قابل نفوذ (سرخابی)، فضای سبز (سبز روشن)، پوشش گیاهی متوسط و بالا (سبز تیره)، وسیله نقلیه (فیروزه ای)، دودکش/آنتن (نارنجی) ) و بهم ریختگی (خاکستری).
شکل 8: مقایسه نقاط سه بعدی از اندازه گیری MVS (RGB) و Lidar (ارتفاع کد شده). خط زرد نمایه نشان داده شده در شکل 9 را مشخص می کند.
ارسال به راحتی با استفاده مجدد از رابطه چند به یک بین نقاط لیدار و چهره ها انجام شد. بنابراین، تقسیمبندی معنایی ابر نقطه لیدار از ویژگیهایی استفاده میکند که در ابتدا فقط برای مش در دسترس بودهاند، به عنوان مثال. بافت از این رو، تقسیم بندی مش معنایی از ویژگی های ذاتی هر دو نمایش استفاده می کند، که یکی دیگر از مزایای تصویر مشترک و پردازش Lidar است.
شکل 9. نمایه استخراج شده با نقاط سه بعدی از Lidar (آبی) و MVS (قرمز).
شکل 10: مش برچسب گذاری شده (سمت چپ) و برچسب ها به ابر نقطه متراکم Lidar (راست) منتقل شده اند.
نتیجه
این مقاله یک گردش کار برای ارجاع جغرافیایی هیبریدی، بهبود و طبقه بندی پهپاد با وضوح فوق العاده بالا Lidar و ابرهای نقطه تصویر ارائه می دهد. در مقایسه با یک ارزیابی جداگانه، جهت گیری ترکیبی دقت را از 5 سانتی متر به کمتر از 1 سانتی متر بهبود می بخشد.
علاوه بر این، هواپیماهای کنترلی لیدار منسوخ می شوند، بنابراین تلاش برای ارائه اطلاعات کنترلی در زمین به طور قابل توجهی کاهش می یابد. نویسندگان انتظار دارند با جایگزین کردن دوربینهای فعلی نصب شده بر روی RIEGL RiCopter با یک سیستم فاز یک iXM با کیفیت بالا، بهبود بیشتری حاصل شود تا تصاویر رادیومتری بهتر با وضوح بالاتر به دست آید. این امر بیشتر از تولید و تجزیه و تحلیل ابرهای نقطهای با کیفیت بالا پشتیبانی میکند و بنابراین امکان ضبط دادههای مبتنی بر پهپاد را برای برنامههای بسیار چالش برانگیز فراهم میکند.
سپاسگزاریها
بخش هایی از تحقیقات ارائه شده در قالب پروژه ای که توسط موسسه فدرال هیدرولوژی آلمان (BfG) در کوبلنتس اعطا شده بود، تامین شد. از Gottfried Mandlburger، Wilfried Karel (TU Wien) و Philipp Glira (AIT) برای پشتیبانی و انطباق آنها با نرم افزار OPALS در طول ارجاع جغرافیایی ترکیبی تشکر می کنیم. پشتیبانی Tobias Hauck از nFrames در طول کار مشترک با SURE نیز تایید شده است.
در Intergeo، Emesent سه محصول جدید را راهاندازی کرد که به متخصصان زمینفضایی در صرفهجویی در زمان کمک میکند و در عین حال دادههای دقیق را برای دوقلوهای دیجیتال و برنامههای BIM ضبط میکند. Emesent یک شرکت پیشگام در زمینه استقلال هواپیماهای بدون سرنشین، نقشه برداری Lidar و تجزیه و تحلیل داده ها است.
این محصولات عبارتند از Hovermap ST-X، نوع جدید Hovermap با دقت بهبود یافته و برد حسگر 300 متر، یک افزودنی رادیویی دوربرد که دامنه ارتباط با Hovermap را تا 20 برابر افزایش می دهد، و پلت فرم Aura Emesent که ارائه می دهد. پردازش یکپارچه SLAM و محیط تجسم ابر نقطه ای برای کاربران Hovermap. دکتر استفان هرابار، مدیر عامل شرکت، گفت: «ما از راهاندازی این محصولات هیجانزده هستیم که در کنار هم به مشتریانمان اجازه میدهند تا دادههای سه بعدی متراکم و دقیق را در مناطق بزرگ و پیچیده در زمان کمتری ثبت کنند و نتایج را با جزئیات عالی ببینند تا بینشهای جدیدی به دست آورند.» و یکی از بنیانگذاران Emesent.
گسترش دامنه اسکن خودکار لیدار
Hovermap ST-X جدیدترین نسخه برنده جایزه Hovermap خودمختاری و دستگاه نقشه برداری Emesent است. جدیدترین فناوری سنجش لیدار را برای ارائه ابرهای نقطه ای با چگالی بالا با افزایش پوشش و دقت بهبود یافته ترکیب می کند. این دستگاه دارای برد سنجش 300 متر، بازگشت های سه گانه و بیش از یک میلیون نقطه در ثانیه است، داده های دقیق و دقیق را در یک منطقه بزرگتر در زمان کمتری ثبت می کند. مشتریانی که مناطق وسیعی را برای استخراج معدن، ساخت و ساز و جنگلداری اسکن میکنند، از این ویژگیها بهره خواهند برد و زمان سریعتری برای بینش فراهم میکنند.
دقت حسگر لیدار بهبود یافته، الگوریتم Wildcat SLAM برنده جایزه و نقاط کنترل زمینی خودکار اختیاری نتایجی را با دقت زیر سانتی متر ارائه می دهند. دقت و تراکم افزایش یافته همچنین به اسکن های داخلی ساختمان ها، کارخانه های صنعتی و سایر دارایی ها برای پلان های طبقه و برنامه های اسکن به BIM کمک می کند.
همانند نسخههای قبلی، Hovermap ST-X استقلال پیشرفته پهپاد نقشه برداری را برای اسکن مناطق غیرقابل دسترس از GPS فراهم میکند یا میتواند برای اسکنهای دستی، کولهپشتی یا روی وسیله نقلیه استفاده شود. طراحی دارای استاندارد IP65 که در شرایط آب و هوایی مهر و موم شده است، امکان استفاده در شرایط مرطوب یا گرد و غبار را نیز فراهم می کند. آندره برودریک، معاون محصول در Emesent گفت: «Hovermap ST-X مطمئناً یک ابزار ارزشمند برای متخصصان بازرسی زمین و دارایی و نقشه برداری خواهد بود. این یک راه حل اسکن همه کاره برای عکسبرداری از مناطق بزرگ در فضای باز یا فضاهای پیچیده داخلی در اختیار آنها قرار می دهد.
بازرسی و نقشه برداری سریع
لوازم جانبی رادیویی دوربرد Emesent به Hovermap متصل میشود تا دامنه اتصال را تا 20 برابر افزایش دهد (تا یک کیلومتر برای برنامههای پروازی از سطح زمین). Broodryk اضافه کرد: «رادیو برد بلند ما به اپراتورها اجازه میدهد تا از مزایای کامل قابلیتهای خودکار و نقشه برداری Hovermap ST-X بهره ببرند و دامنه کاربردهای آن را گسترش دهند.
“همچنین با Hovermap ST سازگار است، بنابراین مشتریان فعلی نیز از آن سود خواهند برد.” رادیو برد بلند با قابلیت اسکن محیط های بزرگ و پیچیده در یک پرواز و در عین حال حفظ پیوند ارتباطی برای به روز رسانی نقاط بین راه و پیش نمایش پوشش ابر نقطه در طول پرواز، در زمان اپراتورها در میدان صرفه جویی می کند. این نیاز به اسکن از چندین مکان یا ادغام مجموعه داده ها در پس پردازش را از بین می برد.
ساده کردن گردش کار اسکن لیزری سه بعدی
Aura، پلتفرم پردازش، تجسم و تجزیه و تحلیل یکپارچه Emesent، یک گردش کار ساده را برای کاربران Hovermap فراهم میکند تا دادههای خود را پردازش کنند، نتایج را مشاهده کنند، مجموعه دادهها را تمیز کنند و اندازهگیریهایی را برای استخراج بینش و تصمیمگیری انجام دهند. موتور تجسم آئورا برای ابرهای نقطه ای متراکم و دقیق تولید شده توسط Hovermap ST و ST-X بهینه شده است.
کاربران میتوانند ابرهای نقطهای با بیش از یک میلیارد نقطه را با وضوح کامل مشاهده کنند تا اطمینان حاصل کنند که جزئیات و بینشهای مهم از دست نمیروند. Broodryk اظهار داشت: “Aura راه حلی ارائه می دهد که گردش کار کاربر را بدون درز و بدون دردسر، مهم نیست که مجموعه داده ها چقدر بزرگ یا متعدد، ابرهای نقطه ای متراکم یا ساختارهای سه بعدی پیچیده هستند.” “Aura همچنین پایه و اساس ماژول های تحلیل ابری نقطه ای آینده را که در حال توسعه آن هستیم، ایجاد می کند.”
Hovermap ST-X استقلال پیشرفته پهپاد را برای اسکن مناطق غیرقابل دسترس از GPS فراهم می کند یا می تواند برای اسکن های دستی، کوله پشتی یا روی وسیله نقلیه استفاده شود. (با احترام: Emesent)
ادغام دوربین Mosaic360 با فناوری RIEGL Lidar – Mosaic اعلام کرده است که دوربین کروی جدید Mosaic X این شرکت اکنون با سیستم های نقشه برداری موبایل RIEGL سازگار است. اسکنرهای RIEGL V-Line در حال حاضر برخی از بالاترین عملکرد و شناخته شده ترین سیستم های اسکن لیزر سیار در جهان هستند. Mosaic طراح و تولید کننده دوربین های نقشه برداری موبایل 360 درجه با وضوح بالا است.
توسعه Mosaic X بر ارائه یک دوربین 360 درجه با وضوح بالا، شاتر جهانی با مهر زنی دقیق GNSS برای دستیابی به وضوح و دقت بصری فوقالعاده در یک لحظه متمرکز بود. به همین دلیل، Mosaic X شرایط لازم برای ادغام با سیستمهای اسکن لیزری موبایل مانند سریهای RIEGL VMX، VMQ و VMY را برآورده میکند.
تصویربرداری از زیرساخت های جاده با دقت عکس واقعی
نقشه برداری سیار در گستره وسیعی از صنایع و بخش ها، از سازمان های خصوصی گرفته تا دولتی، و از شرکت های بیمه و مهندسی گرفته تا شرکت های مخابراتی و نقشه برداری، کاربردهای گسترده ای دارد. هر کاربر نهایی خواستههای متفاوتی برای نقشهبرداری زیرساختهای خود دارد، اما دو خواسته ثابت، تصاویر واقعی عکس با وضوح بالا و دادههای بسیار دقیق، متراکم و غنی از ویژگیها هستند.
سیستمهای نگاشت سیار مانند RIEGL VMY-1، RIEGL VMY-2، RIEGL VMQ-1HA و RIEGL VMX-2HA، دادههای سهبعدی سطوح اشیاء را به روشی کارآمد و بسیار دقیق ضبط میکنند.
دوربینهای نقشهبرداری موبایل مانند Mosaic 51 و Mosaic X زیرساختهای جادهای را با دقت واقعی عکسبرداری میکنند، که برای چشم انسان بسیار قابل درکتر از ابر نقطهای از یک اسکنر لیزری است.
آزادسازی پتانسیل ابرهای نقطه ای دقیق
Rostislav Lisovy، یکی از بنیانگذاران Mosaic و معاون مهندسی، مزایایی را که مشتریان میتوانند انتظار داشته باشند از آنها لذت ببرند، توضیح داد: «جفت شدن بین سیستمهای تصویربرداری 360 درجه و سیستمهای اسکن لیزری سیار منجر به ایجاد ابرهای نقطهای مبتنی بر Lidar با دقت بالا میشود که با رنگآمیزی عکس های واقع گرایانه این نتیجه سپس از مزایای یک ابر نقطه دقیق و تصاویر پانوراما – برای اندازه گیری دقیق و ارزیابی بافت ها برخوردار خواهد بود.
«مشتریان ما قادر خواهند بود دادههای ارزشمندتری را جمعآوری کنند که به فرآیند ارزیابی خودکار وضعیت زیرساخت از دادههای ابر نقطهای کمک میکند – نه فقط از یک تصویر پانوراما».
جفری مارتین، مدیرعامل و یکی از بنیانگذاران موزائیک، اظهار داشت: «ما درخواست های زیادی از سوی مشتریان خود داشته ایم که به دنبال استفاده هماهنگ از محصولات RIEGL و Mosaic هستند. Mosaic X با تصاویر پانوراما با وضوح بالا تحت تاثیر قرار میگیرد و تصاویر تک لنز با زمان دقیق را برای رنگآمیزی ابر نقطهای و همچنین تولید تصاویری با وضوح بالا بدون تحریف و ارجاع جغرافیایی با ۱۲ مگاپیکسل در هر لنز ارائه میدهد.
دوربینهای با وضوح بالا Mosaic X اکنون با خط سیستمهای اسکن لیزری سیار RIEGL سازگار هستند.
lidar lidar lidar lidar lidar lidar lidar
سایت Geonline، سایتی مرجع برای مرتفع نمودن نیاز علاقمندان، پژوهشگران، دانشجویان و دانش آموزان در حوزه جغرافیا است که برای تمامی سنین و سطوح مطالب کاربردی دارد.