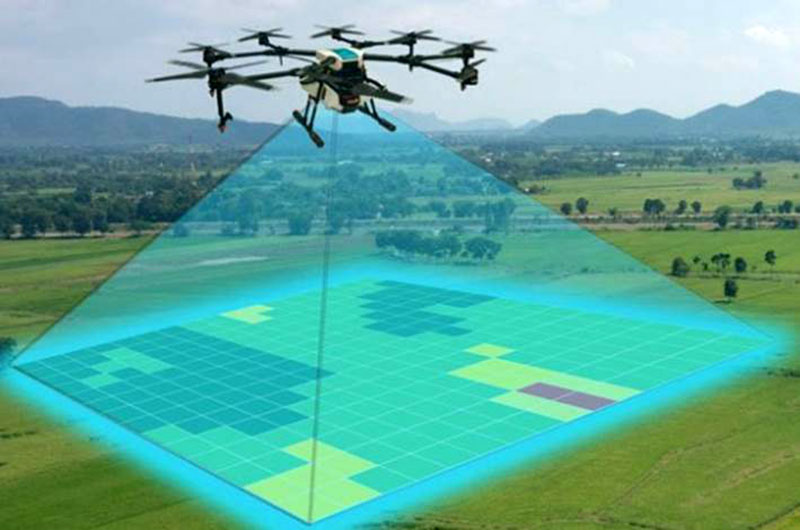
پهپادها به طور فزاینده ای در صنایع در سراسر جهان محبوب می شوند. توانایی آنها در جمع آوری داده ها از آسمان در طیف گسترده ای از کاربردها از مهندسی تا کشاورزی مفید است.
خوشبختانه در حال حاضر چندین پلت فرم رایگان تصویربرداری پهپاد وجود دارد که به کاربران GIS کمک می کند تا به راحتی به تصاویر پهپاد مورد نیاز خود دسترسی پیدا کرده و آن را تجزیه و تحلیل کنند.
اگر به دنبال به دست آوردن داده های نمونه پهپاد رایگان هستید، این 3 پلت فرم داده آنلاین را بررسی کنید. هر کدام میتوانند تصاویر با وضوح بالا، مدلهای سهبعدی و انبوهی از اطلاعات زمینی را در اختیار شما قرار دهند.
1. نقشه هوایی را باز کنید
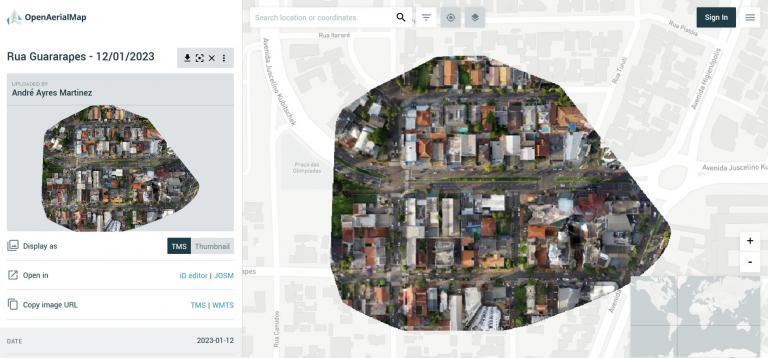
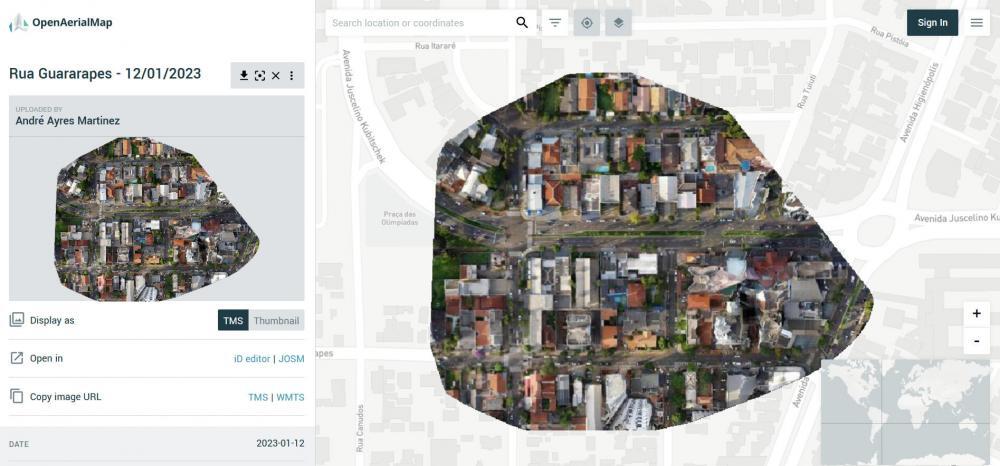
نقشه هوایی باز (OAM) یک پروژه نقشه برداری منبع باز و جامعه محور است که تصاویر هوایی را از منابع و مکان های مختلف مدیریت می کند. همه تصاویر از طریق پلتفرم OAM در دسترس قرار می گیرند، که به عنوان یک مخزن برای تصاویر هوایی جدید و موجود عمل می کند.
پروژه نقشه هوایی باز برای اولین بار در سال 2017 توسط گروهی از داوطلبان و توسعه دهندگان که می خواستند تصاویر هوایی را برای عموم قابل دسترس تر کنند، راه اندازی شد. از آن زمان، OAM به یکی از پروژه های پیشرو نقشه برداری منبع باز در جهان تبدیل شده است.
متوجه خواهید شد که این پلتفرم به گونه ای طراحی شده است که کاربر پسند بوده و به راحتی قابل پیمایش است. این آن را برای کاربران مبتدی و با تجربه به طور یکسان ایده آل می کند. علاوه بر این، این پلتفرم همچنین اطلاعات دقیقی در مورد ارائه دهنده، حسگر، وضوح، اندازه فایل، مکان و موارد دیگر ارائه می دهد.
2. USGS Earth Explorer
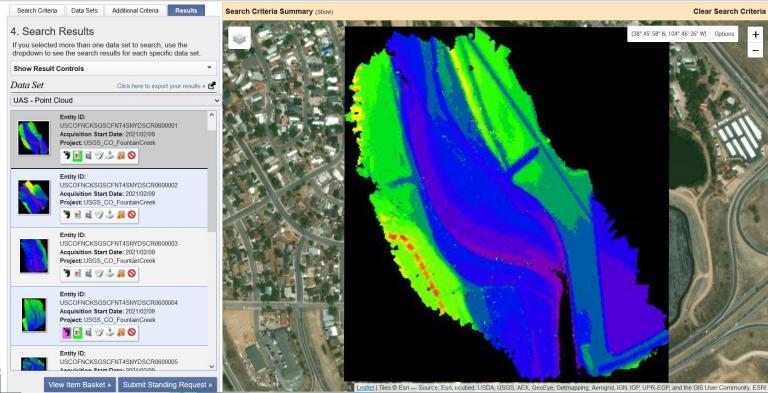
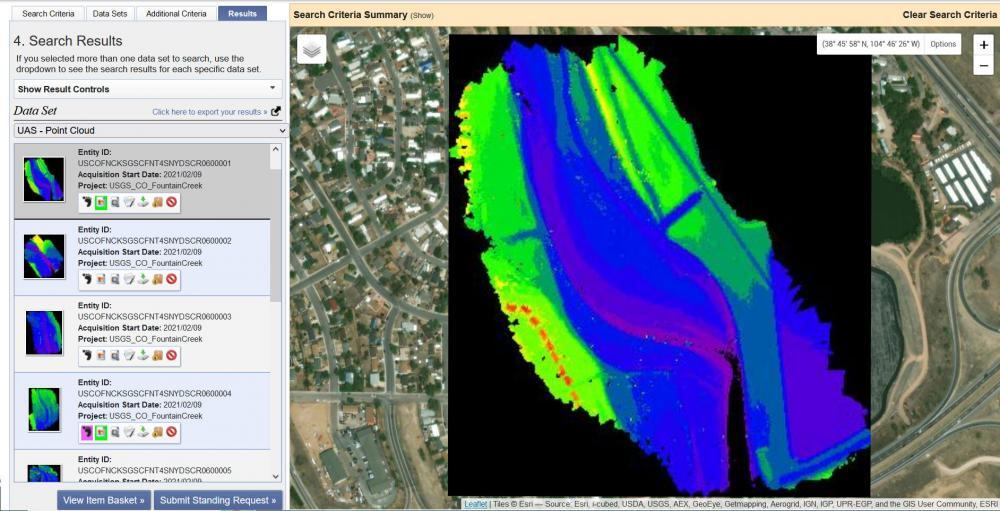
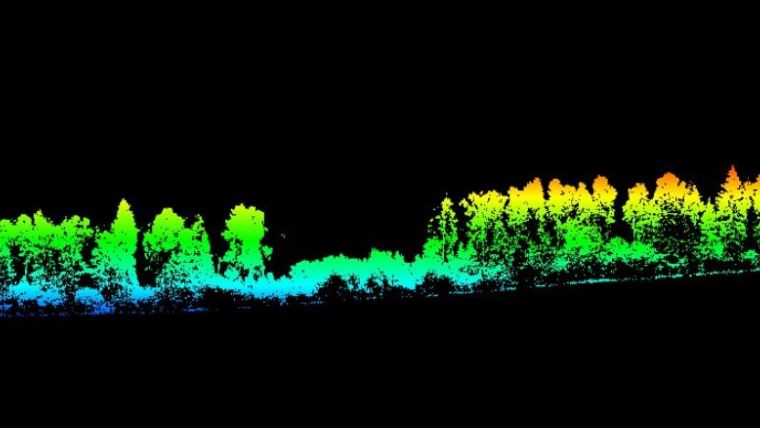
USGS Earth Explorer یک منبع عالی برای تصاویر پهپاد با طیف گسترده ای از انواع مختلف داده های پهپاد، از جمله عکاسی هوایی و LiDAR است. کاربران می توانند داده ها یا مناطق مورد علاقه خاص را جستجو کنند و تصاویر را مستقیماً از وب سایت USGS Earth Explorer دانلود کنند.
ابتدا باید یک حساب کاربری ثبت کنید که رایگان و بدون دردسر است. ثانیاً، میتوانید تمام تصاویر هواپیمای بدون سرنشین رایگان آن را در مجموعه «سیستمهای هواپیمای بدون سرنشین (UAS)» بیابید. گزینههایی برای انتخاب از میان تصويرهای قاعده، ابرهای نقطه، DEM یا دادههای خام وجود دارد.
حتماً مرتباً بررسی کنید زیرا USGS این تصاویر را به طور منظم بهروزرسانی میکند. این تضمین می کند که شما به روزترین داده ها را دارید. همه این ویژگی ها USGS Earth Explorer را به منبعی عالی برای به دست آوردن تصاویر رایگان پهپاد تبدیل می کند.
3. نقشهبردار هواپیماهای بدون سرنشین
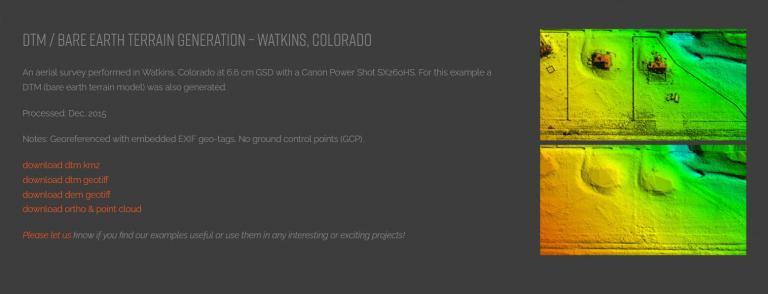
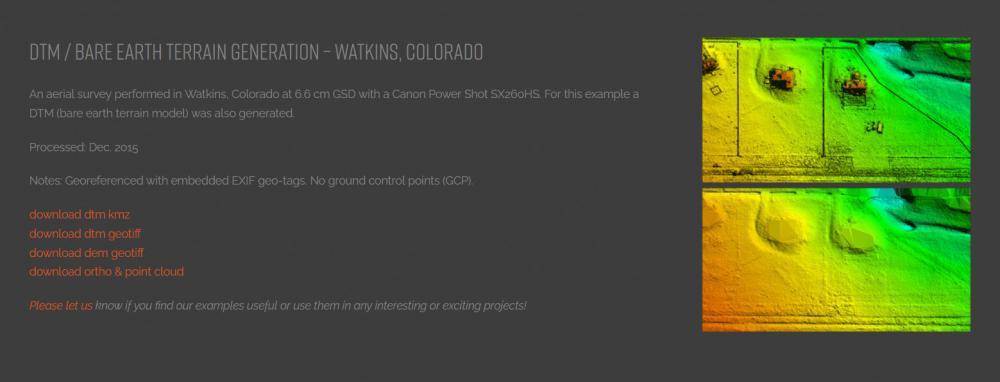
مخزن داده Drone Mapper نوع معمولی پلت فرم نقشه برداری نقطه و کلیک شما نیست. در عوض، فهرست گستردهای از نمونه دادههای پهپاد را برای دانلود و بازی در اختیار شما قرار داده است.
همه اینها در یک صفحه با تصاویر نمونه فهرست شده است تا بدانید چه چیزی را می خواهید دانلود کنید. اگرچه گزینه های زیادی ندارید، اما مکان های بسیار سورئال را دریافت می کنید. به عنوان مثال، شامل یک گودال شن، یک دره، یک زمین کشاورزی و یک زمین گلف است.
همچنین در سمت روشن، شما می توانید از بین تصاویر ارتویماژی، DTM، حرارتی یا مایل انتخاب کنید. تنوع داده های مشتق شده از پهپاد آن را برای کاربران با تجربه ایده آل می کند. مطمئن شوید که به بررسی خود ادامه می دهید تا ببینید آیا موارد بیشتری برای اضافه کردن دارند یا خیر.
منابع تصویری رایگان پهپاد و پهپاد
با ظهور وسایل نقلیه هوایی بدون سرنشین (UAV) و پهپا دها، دنیای داده ها برای همیشه تغییر کرده است. پهپادها و پهپادها راهی برای جمعآوری دادههایی که قبلاً در دسترس نبودند یا دستیابی به آنها بسیار پرهزینه بود به ما ارائه میدهند.
این 3 پلت فرم داده پهپاد فرصتی را برای ما فراهم می کند تا به تصاویر پهپا د با کیفیت بالا و رایگان در قالب جغرافیایی دسترسی داشته باشیم. هر مجموعه داده پهپا د حاوی مقدار بی سابقه ای از جزئیات است تا بتوانید قدرت پهپا دها را درک کنید.
پهپادها به طور فزاینده ای در صنایع در سراسر جهان محبوب می شوند. توانایی آنها در جمع آوری داده ها از آسمان در طیف گسترده ای از کاربردها از مهندسی تا کشاورزی مفید است.
خوشبختانه در حال حاضر چندین پلت فرم رایگان تصویربرداری پهپاد وجود دارد که به کاربران GIS کمک می کند تا به راحتی به تصاویر پهپاد مورد نیاز خود دسترسی پیدا کرده و آن را تجزیه و تحلیل کنند.
اگر به دنبال به دست آوردن داده های نمونه پهپاد رایگان هستید، این 3 پلتفرم داده آنلاین را بررسی کنید. هر کدام میتوانند تصاویر با وضوح بالا، مدلهای سهبعدی و انبوهی از اطلاعات زمینی را در اختیار شما قرار دهند.
1. Open Aerial Map
نقشه هوایی باز (OAM) یک پروژه نقشه برداری منبع باز و جامعه محور است که تصاویر هوایی را از منابع و مکان های مختلف مدیریت می کند. همه تصاویر از طریق پلتفرم OAM در دسترس قرار می گیرند، که به عنوان یک مخزن برای تصاویر هوایی جدید و موجود عمل می کند.
پروژه نقشه هوایی باز برای اولین بار در سال 2017 توسط گروهی از داوطلبان و توسعه دهندگان که می خواستند تصاویر هوایی را برای عموم قابل دسترس تر کنند، راه اندازی شد. از آن زمان، OAM به یکی از پروژه های پیشرو نقشه برداری منبع باز در جهان تبدیل شده است.
متوجه خواهید شد که این پلتفرم به گونه ای طراحی شده است که کاربر پسند و آسان برای پیمایش باشد. این آن را برای کاربران مبتدی و با تجربه به طور یکسان ایده آل می کند. علاوه بر این، این پلتفرم همچنین اطلاعات دقیقی در مورد ارائه دهنده، حسگر، وضوح، اندازه فایل، مکان و موارد دیگر ارائه می دهد.
2. USGS Earth Explorer
USGS Earth Explorer یک منبع عالی برای تصاویر پهپاد با طیف گسترده ای از انواع مختلف داده های پهپاد، از جمله عکاسی هوایی و LiDAR است. کاربران می توانند داده ها یا مناطق مورد علاقه خاص را جستجو کنند و تصاویر را مستقیماً از وب سایت USGS Earth Explorer دانلود کنن
ابتدا باید یک حساب کاربری ثبت کنید که رایگان و بدون دردسر است. ثانیاً، میتوانید تمام تصاویر هواپیمای بدون سرنشین رایگان آن را در مجموعه «سیستمهای هواپیمای بدون سرنشین (UAS)» بیابید. گزینههایی برای انتخاب از میان تصويرهای قاعده، ابرهای نقطه، DEM یا دادههای خام وجود دارد.
حتماً مرتباً بررسی کنید زیرا USGS این تصاویر را به طور منظم بهروزرسانی میکند. این تضمین می کند که شما به روزترین داده ها را دارید. همه این ویژگی ها USGS Earth Explorer را به منبعی عالی برای به دست آوردن تصاویر رایگان پهپاد تبدیل می کند.
3. نقشهبردار هواپیماهای بدون سرنشین
مخزن داده Drone Mapper نوع معمولی پلت فرم نقشه برداری نقطه و کلیک شما نیست. در عوض، فهرست گستردهای از نمونه دادههای پهپاد را برای دانلود و بازی در اختیار شما قرار داده است.
همه اینها در یک صفحه با تصاویر نمونه فهرست شده است تا بدانید چه چیزی را می خواهید دانلود کنید. اگرچه گزینه های زیادی ندارید، اما مکان های بسیار سورئال را دریافت می کنید. به عنوان مثال، شامل یک گودال شن، یک دره، یک زمین کشاورزی و یک زمین گلف است.
همچنین در سمت روشن، شما می توانید از بین تصاویر ارتویماژی، DTM، حرارتی یا مایل انتخاب کنید. تنوع داده های مشتق شده از پهپاد آن را برای کاربران با تجربه ایده آل می کند. مطمئن شوید که به بررسی خود ادامه می دهید تا ببینید آیا موارد بیشتری برای اضافه کردن دارند یا خیر.
منابع تصویری رایگان پهپاد و پهپاد
با ظهور وسایل نقلیه هوایی بدون سرنشین (UAV) و پهپادها، دنیای داده ها برای همیشه تغییر کرده است. پهپادها و پهپادها راهی برای جمعآوری دادههایی که قبلاً در دسترس نبودند یا دستیابی به آنها بسیار پرهزینه بود به ما ارائه میدهند.
این 3 پلت فرم داده پهپاد فرصتی را برای ما فراهم می کند تا به تصاویر پهپاد با کیفیت بالا و رایگان در قالب جغرافیایی دسترسی داشته باشیم. هر مجموعه داده پهپاد حاوی مقدار بی سابقه ای از جزئیات است تا بتوانید قدرت پهپادها را درک کنید.
امیدواریم از این منابع رایگان داده های پهپاد لذت برده باشید. اما آیا منابع محبوب دیگری را از دست دادیم؟ لطفا با اضافه کردن نظر در بخش زیر به ما اطلاع دهید.
تیم استودیوی مشاوره معماری WDS-LAB مستقر در لندن با استفاده از فناوری پهپاد و فتوگرامتری برای تخمین میزان انرژی خورشیدی قابل جذب در محیطهای شهری، جریان کاری جدیدی ایجاد کردهاند. درک بهتر از مقدار انرژی خورشیدی که میتوان مستقیماً از پشت بامها جمعآوری کرد، میتواند از وظیفه پیچیده انتقال مناطق مسکونی کم تراکم موجود به انرژیهای تجدیدپذیر پشتیبانی کند.
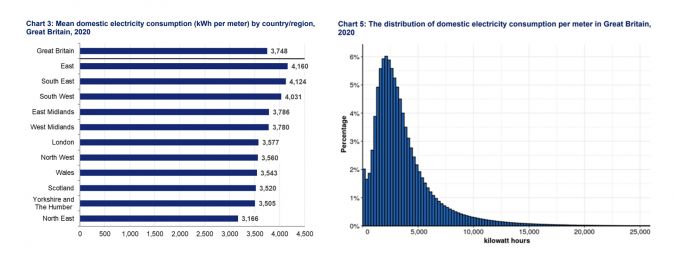
برای تحقق توافقنامه پاریس، حفظ گرمایش جهانی زیر 1.5 درجه سانتیگراد و رسیدن به “صفر خالص” در سال 2050، انتشار CO2 در مناطق مسکونی باید حداقل 78٪ در دهه آینده کاهش یابد. در سال 2020، طبق گزارش آمار مصرف برق و گاز زیر ملی ارائه شده توسط وزارت انرژی تجاری و استراتژی صنعتی، میانگین مصرف سالانه برق خانگی در بریتانیا 3750 کیلووات ساعت بود، در حالی که متوسط مصرف برق خانگی 2900 کیلووات ساعت بود (شکل 2). ).
با این حال، به گفته کمیته تغییرات آب و هوایی بریتانیا، حدود 29 میلیون خانه در بریتانیا دارای سیستم های ساخت و ساز قدیمی هستند و مسئول هدر دادن مقادیر زیادی انرژی برای گرمایش و/یا سرمایش در طول سال هستند. انرژی خورشیدی میتواند نقش مهمی در بازسازی خانهها ایفا کند تا به آنها کمک کند تا درصد قابلتوجهی از انرژی مورد نیاز خود را از انرژیهای تجدیدپذیر به طور مستقیم در محل تامین کنند.
شکل 1: یک DJI Mavic Enterprise Advanced با لنز دوگانه و DJI Air 2S برای پروژه استفاده شد.
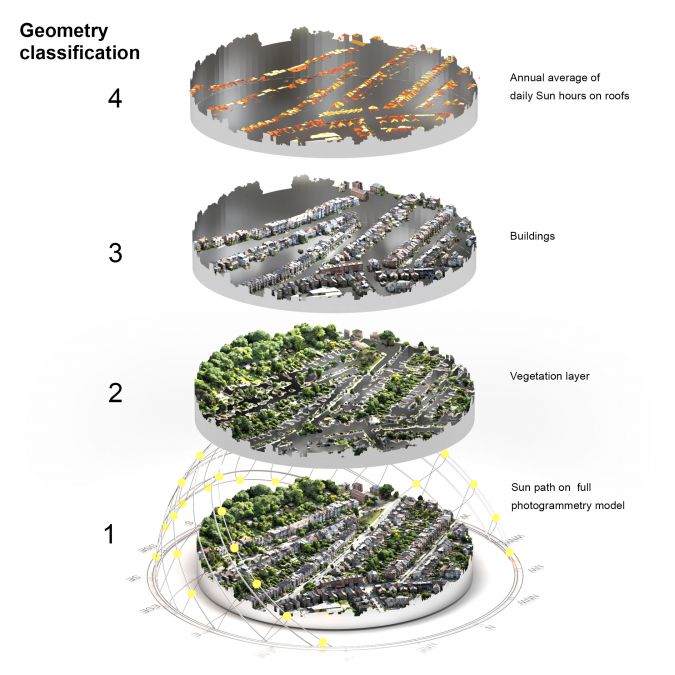
تیم WDS-LAB مطالعهای را برای تخمین میزان انرژی خورشیدی قابل جذب در محیطهای شهری انجام دادند. این تیم برای این مطالعه به تصاویر وسایل نقلیه هوایی بدون سرنشین (پهپاد ) تکیه کردند زیرا راه حلی مقرون به صرفه است. علاوه بر این، مدل های فتوگرامتری سه بعدی را با وضوح و دقت بالاتر نسبت به تصاویر ماهواره ای فعال می کند.
دقت مدل مش سه بعدی عامل مهمی در این پروژه به منظور ساخت مدل دقیق از ساختمان های مسکونی و به دست آوردن شیب مناسب سقف ها به منظور محاسبه میزان انرژی خورشیدی به آنها بود. این کار با استفاده از روش طبقه بندی هندسی مناسب انجام شد. هنگامی که مشخصات پنل های فتوولتائیک خورشیدی مشخص شد، می توان میزان برق تولید شده توسط یک آرایه پنل خورشیدی در ماه را به طور دقیق پیش بینی کرد.
این اطلاعات به طور بالقوه برای شوراهای محلی و سایر مقامات دولتی و همچنین صاحبان خانه جالب است. مطالعات آزمایشی اولیه بر روی محلههای لندن انجام شد، اما از نظر تئوری این تکنیک پیمایشی را میتوان در هر نقطه از جهان به کار برد.
شکل 2: توزیع برق مصرفی خانگی در بریتانیای کبیر (از وزارت انرژی تجاری و استراتژی صنعتی).
تولید مدل فتوگرامتری سه بعدی
روش توسعه یافته توسط WDS-LAB برای تعیین کمیت انرژی رسیده به پشت بام ها، میزان مساحتی را در نظر می گیرد که می تواند برای نصب آرایه های پانل های فتوولتائیک مستطیلی (PV) تجاری مناسب باشد. برای تولید مدل فتوگرامتری، از پهپاد تجاری DJI Enterprise Advanced مجهز به لنز دوگانه استفاده شد: یک لنز برای طیف حرارتی و یک لنز برای طیف نور مرئی (که قادر به دریافت تصاویر 48 مگاپیکسلی بود).
روش ثبت تصاویر برای مدل فتوگرامتری متکی بر ایجاد یک مأموریت پرواز نقشه برداری از پهپاد از پیش برنامه ریزی شده بود، به طوری که تصاویر می توانند به طور خودکار با توزیع یکنواخت و زاویه دوربین اوج جمع آوری شوند. وضوح بالای اپتیک پهپاد به این معنی است که پهپاد می تواند در حداکثر ارتفاع 120 متری مطابق با مقررات فضای هوایی در لندن پرواز کند و امکان پوشش منطقه وسیع تری را در زمان کمتری فراهم کند.
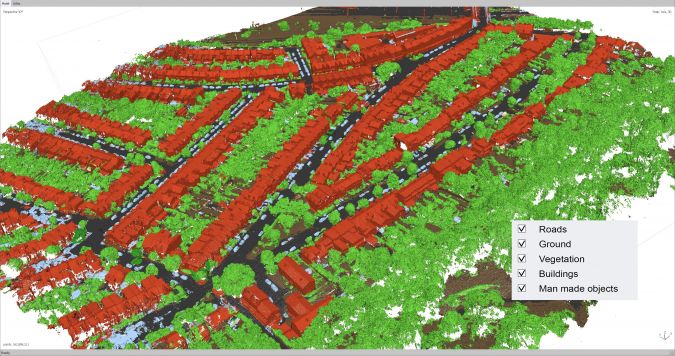
شکل 3: طبقه بندی ابر نقطه ای با Agisoft Metashape.
پس از جمعآوری مجموعه دادههای تصویر، تیم تصاویر را با استفاده از نرمافزار فتوگرامتری Agisoft Metashape جمعآوری کرد و یک مدل سهبعدی بافتدار دقیق به دست آورد. با استفاده از الگوریتم یادگیری ماشین برای طبقهبندی خودکار ابر نقطه، میتوان ساختمانها را از همه ویژگیهای دیگر (مانند درختان، خیابانها و عناصر زمین) جدا کرد، که مراحل بعدی تجزیه و تحلیل قرار گرفتن در معرض خورشید را بر روی هندسه سقف سادهسازی کرد.
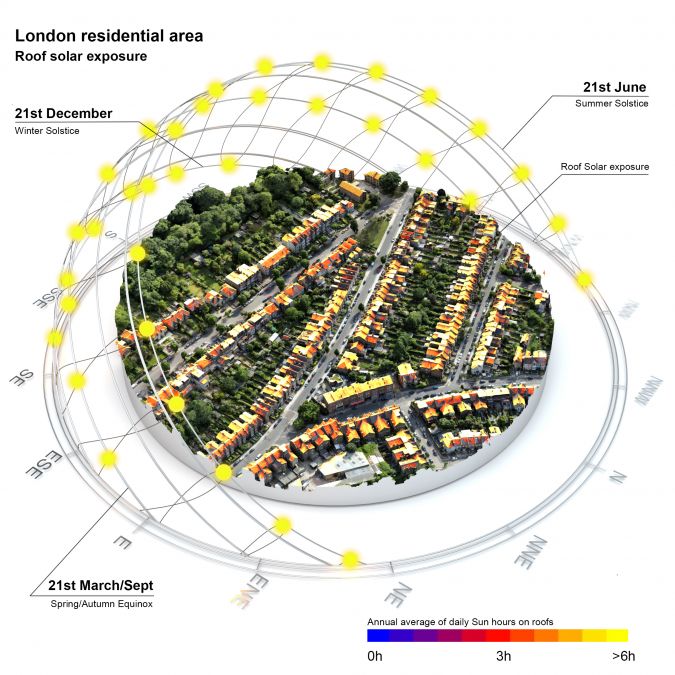
شکل 4: نمودار مسیر خورشید و نتایج تابش خورشید بر روی سقف های ایجاد شده با Rhinoceros 3D و Grasshopper.
با توجه به پیشینه معماری تیم WDS-LAB، آنها بر ابزارهای مدل سازی مش سه بعدی خارج از قلمرو نرم افزار نقشه برداری معمولی تکیه کردند. Rhinoceros 3D از آنجایی که در بین معماران و طراحان شهری رایج است مورد استفاده قرار گرفت. این امکان پردازش مش سه بعدی، رندر و تجسم بافت را فراهم می کند. همچنین به یک پلت فرم برنامه نویسی بصری چشمگیر مجهز شده است که امکان ایجاد الگوریتم های پیچیده برای تجزیه و تحلیل داده های محیطی سه بعدی (Grasshopper 3D) را با در نظر گرفتن پایگاه داده های آب و هوای محلی فراهم می کند.
الگوریتمهای بهدستآمده توانستند شبکه را بهطور خودکار برش دهند و هندسههای سقف را طبقهبندی کنند و آنها را از بقیه سطوح ساختمان جدا کنند. این باعث کاهش تعداد چند ضلعی هایی شد که باید توسط موتور آنالیز خورشیدی تجزیه و تحلیل شوند.
تجزیه و تحلیل دسترسی خورشیدی تعداد ساعتهای خورشید و تشعشع خورشیدی برخوردی یک هندسه میتواند در یک دوره زمانی معین دریافت کند و انباشتگی آن را در هر سطح مش محاسبه کرد. این فرآیند مقادیر تابش افقی جهانی ساعتی و سایه هایی را که هر عنصر مجاور می تواند بر روی آنها ایجاد کند در نظر می گرفت. این یک عملیات محاسباتی سنگین بود، اما برش و طبقه بندی کل فرآیند تجزیه و تحلیل را بسیار سریعتر از تلاش برای تجزیه و تحلیل همه چیز به یکباره کرد.
شکل 5: تصویری که روند طبقه بندی و استخراج سقف ها را نشان می دهد.
محاسبه مساحت پنل های خورشیدی روی سقف
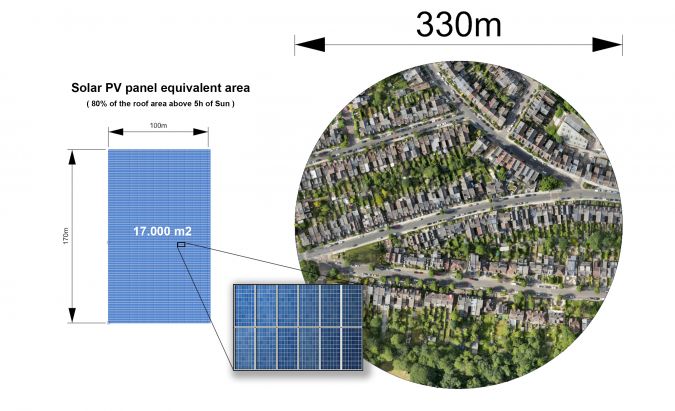
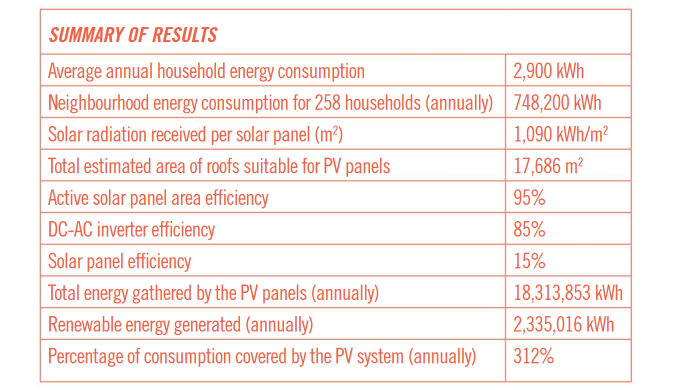
سقفهای مسکونی اغلب دارای بینظمیهایی مانند دودکشها و ویژگیهای مخابراتی یا سایر عناصر هستند که میتوانند ادغام پنلهای خورشیدی مستطیلی تجاری با ابعاد 1×1.7 متر را دشوار کنند. با این وجود، تخمین زده شد که 80 درصد از سطوح سقف از نظر هندسی برای تخصیص پانل های PV مناسب است، که به این معنی است که مساحت کل 17000 متر مربع از صفحات خورشیدی را می توان بر روی سقف های محله نمونه برداری شده نصب کرد (شکل 6).
شکل 6: مساحت تخمینی پنل های خورشیدی که روی پشت بام های همسایگی قرار می گیرند.
محاسبه سهم انرژی خورشیدی از پانل های خورشیدی
برای این مطالعه، تیم از پایگاههای داده استاندارد برای پانلهای فتوولتائیک خورشیدی استفاده کرد و مقادیری را که در شکل 11 میتوان مشاهده کرد، در نظر گرفت. در مجموع 2,335,016 کیلووات ساعت انرژی. بر اساس میانگین مصرف سالانه خانوارها در بریتانیای کبیر طبق وزارت انرژی تجاری و استراتژی صنعتی (2900 کیلووات ساعت در سال برای هر خانوار)، این مقدار انرژی خورشیدی که مستقیماً از پشت بام ها جمع آوری می شود، می تواند سالانه 800 خانوار را تامین کند.
از باتری ها برای ذخیره انرژی برای استفاده در شب استفاده می شد. از آنجایی که محله نمونه برداری شده دارای 258 اقامتگاه بود، به این نتیجه رسیدیم که اگر انرژی تولید شده در طول سال انباشته شود، سقف ها می توانند سه برابر انرژی مورد نیاز خورشیدی را جمع آوری کنند.
شکل 7: هندسه های طبقه بندی شده استخراج شده از مدل فتوگرامتری.
نتیجه گیری
استفاده از ابزارهای شبیهسازی محیطی معماری بر روی مدلهای فتوگرامتری ثبتشده با هواپیماهای بدون سرنشین، سیستمی سریع و قابل اعتماد است که میتواند به ارزیابان انرژی و معماران کمک کند تا پتانسیل بهرهبرداری محلی از منابع انرژی تجدیدپذیر در محیطهای شهری را بهتر درک کنند.
به لطف این گردش کار آزمایشی، WDS-LAB تخمین میزند که PVهای تخصیص داده شده در پشت بام محلهای مانند محله مورد مطالعه میتوانند انرژی بیشتری از انرژیهای تجدیدپذیر تولید کنند. انرژی اضافی را می توان برای تامین انرژی ساختمان های دیگر استفاده کرد و با مناطق دیگر با تراکم مسکونی بالاتر تعادل ایجاد کرد، بنابراین به شهری مانند لندن کمک کرد تا ردپای کربن خود را کاهش دهد.
پهپادها و فتوگرامتری ابزارهای عالی برای مطالعه روشهای جدید برای ادغام انرژیهای تجدیدپذیر در بافتهای شهری هستند که به دستیابی به هندسههای دقیقتر و در نظر گرفتن وضعیت موجود «به عنوان ساخته شده» کمک میکنند. این کار نسبت به استفاده از مدلهای CAD جمعآوری سادهشده که بهصورت آنلاین از سازمانهای مختلف در دسترس است، دقت بیشتری به فرآیند میدهد. اینها به طور منظم به روز نمی شوند و به طور کلی تغییرات احتمالی در سطوح ساختمان ها و عناصر بافت اطراف را در نظر نمی گیرند.
شکل 8: مدل سه بعدی فتوگرامتری محله بافت قبل از طبقه بندی سقف ها برای تجزیه و تحلیل خورشیدی.
تیم WDS-LAB به مطالعه مناطق شهری بیشتر برای گسترش پایگاه داده و ارزیابی پتانسیل کامل محلههای لندن برای نصب پانلهای PV برای کمک به انتقال شهر به انرژیهای تجدیدپذیر ادامه خواهد داد. شکی نیست که انرژی خورشیدی شهری نقش مهمی در کاهش انتشار کربن خواهد داشت. مطالعاتی مانند این به افزایش آگاهی در مورد اینکه سقف خانههای مردم میتواند دسترسی ارزشمندی به انرژیهای تجدیدپذیر ارائه دهد، کمک میکند.
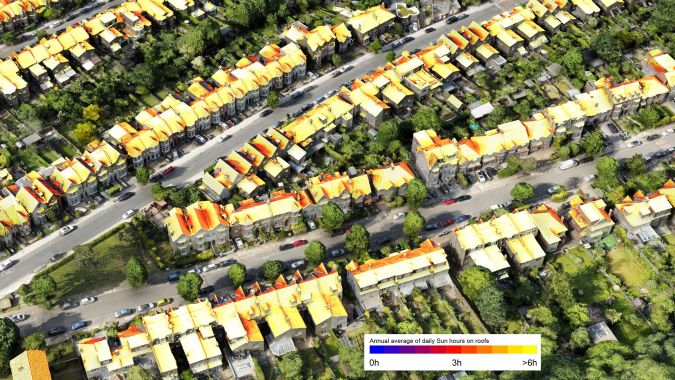
شکل 9: میانگین ساعات خورشید در هر سقف، که در نتیجه یک نقشه گرما از توزیع خورشیدی ایجاد می شود.
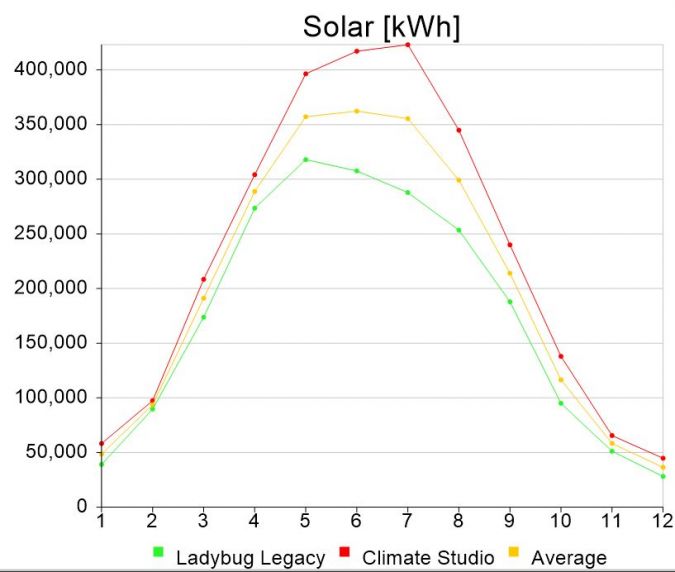
شکل 10: سهم ماهانه آرایه خورشیدی. محاسبات با مقایسه نتایج با استفاده از دو موتور مختلف (Ladybug Legacy و Climate Studio) اعتبارسنجی شدند.
شکل 11: نتایج بر اساس مقادیر استاندارد برای پانل های فتوولتائیک خورشیدی.
در سالهای اخیر، پهپاد از جایگاه خود به عنوان یک اخلالگر فراتر رفته و به بخشی استاندارد از ابزار نقشهبرداران برای نقشه برداری تبدیل شده است. یکی از مواردی که این هواپیمای بدون سرنشین را بسیار محبوب می کند، تطبیق پذیری آن است که در این مجموعه از مقالات GIM International نشان داده شده است. آنها تعداد زیادی از امکانات پهپادها را برای کاربردهای گسترده در شرایط مختلف برجسته می کنند.
استخراج خودکار اطلاعات جاده ها از داده های مبتنی بر پهپاد
وقتی صحبت از نظارت بر وضعیت جادهها میشود، فناوری پهپاد میتواند بر بسیاری از معایب مرتبط با روشهای سنتی غلبه کند که میتواند زمانبر، کار فشرده و گاهی ذهنی باشد. این مقاله فرصتهایی را برای استخراج خودکار اطلاعات دادههای مبتنی بر پهپاد در مورد ساخت و ساز جاده، موجودی و محیطهای جاده بررسی میکند.
پلتفرم های اخیر پهپاد به طور مشترک تصاویر و داده های Lidar را جمع آوری می کنند. ارزیابی ترکیبی آنها به طور بالقوه ابرهای نقطه سه بعدی را با دقت و وضوح چند میلی متری ایجاد می کند که تا کنون محدود به جمع آوری داده های زمینی است. این مقاله پروژه ای را تشریح می کند که تنظیم بلوک بسته نرم افزاری فتوگرامتری را با ارجاع جغرافیایی مستقیم ابرهای نقطه لیدار ادغام می کند تا دقت مربوطه را با یک مرتبه قدر بهبود بخشد. مزایای دیگر پردازش ترکیبی ناشی از افزودن اندازهگیری محدوده Lidar به تطبیق تصویر چند نمای استریو (MVS) در طول تولید ابرهای نقطه سهبعدی متراکم با دقت بالا است.
در بخش علوم زمین، حسگرهای اندازهگیری ویژگیهای زمین به سرعت برای استفاده از هواپیماهای بدون سرنشین سازگار میشوند، زیرا پیشرفتهای جدید در فناوری منجر به افزایش اندازه و بار وسایل نقلیه هوایی بدون سرنشین (پهپادها یا پهپادها) شده است. این مقاله دو مطالعه را ارائه میکند که فرصتهایی را برای افزودن طیفسنج پرتو گاما به یک پهپاد به منظور ترسیم بافت یا آلودگی خاک بررسی میکند.
قبل از استفاده از پهپاد برای پروژه های آمایش سرزمین چه نکاتی را باید در نظر گرفت؟
پهپادها تصاویر ارتووماتیکی را ارائه می دهند که از آنها می توان داده های مکانی – از جمله مرزهای بسته قابل مشاهده، خطوط کلی ساختمان و مختصات – را استخراج کرد. در حال حاضر بسیاری از شرکتهای فناوری زمینفضایی راهحلهای مبتنی بر پهپاد با فناوری پیشرفته ارائه میکنند و بسیاری از ارائهدهندگان سختافزار و نرمافزار جدید نیز وارد بازار شدهاند. به لطف کاهش قیمت پهپادها، بسیاری از نقشه برداران زمین اکنون یا در حال آزمایش پهپادها هستند و یا در حال استفاده روزانه از آنها هستند. بنابراین، سوالات کلیدی که قبل از تصمیم گیری برای استفاده از یک پهپاد در پروژه بعدی مدیریت زمین خود نیاز به پاسخ دارند، چیست؟
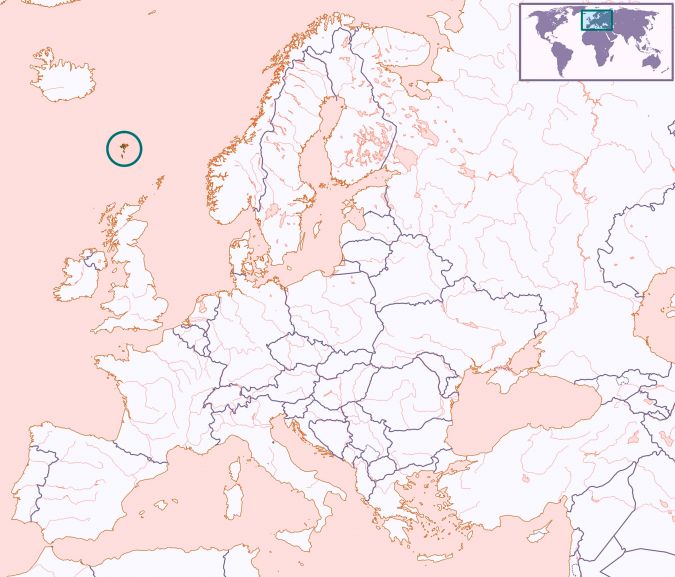
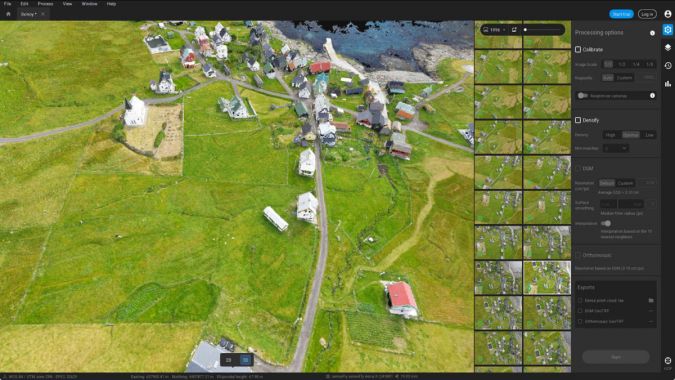
جزایر فارو که در شمال اقیانوس اطلس قرار دارند و تقریباً از اسکاتلند، ایسلند و نروژ فاصله دارند، مجمع الجزایری ناهموار و صخره ای را تشکیل می دهند. هوای خنک و ابری، همراه با بادهای شدید و بارش باران شدید در تمام طول سال، به این معنی است که این یک محیط بررسی چالش برانگیز است. مقامات نقشه برداری در جستجوی بهترین روش برای ثبت این محیط خیره کننده به پهپادها روی آورده اند. این مقاله داستان نقشه برداری و بررسی یک نقطه واقعا نفس گیر در زمین را بیان می کند.
باستان شناسان ده ها سال است که روی Sand Canyon Pueblo در کلرادو، ایالات متحده آمریکا مطالعه می کنند. امروزه نقشه برداری و تجسم سنتی پر زحمت دیگر برای مطالعات دقیق کافی نیست. بررسی ترکیبی از یک سیستم هوایی بدون سرنشین (UAS) با لیدار نشان داده است که چگونه ابرهای نقطه ای دقیق و متراکم امکان کشف سازه هایی که قبلاً مستند نشده بودند را میسر می سازد. با این حال، همانطور که نویسنده به طور قانع کننده ای نشان می دهد، انجام یک نظرسنجی UAS Lidar نیازمند دانش و مهارت های کامل است.
Topodrone از ادغام اسکنر Lidar Prime خود با پهپاد aOrion Heli-E که توسط حسگر Alpha Prime Velodyne فعال شده است، خبر داده است. هدف از این کار پر کردن شکاف در راهحلهای نقشه برداری مبتنی بر پهپاد بین سیستمهای هوایی سرنشین دار سنگین وزن و گران قیمت لیدار و سامانههای پهپاد سبک وزن لیدار است. این سیستم به کاربران اجازه میدهد تا برنامههای کاربردی خود را برای بررسی مناطق وسیعی که قبلاً فقط با استفاده از هواپیماهای سرنشین دار یا هلیکوپتر بررسی میشد، گسترش دهند. Topodrone یک طراح و سازنده تجهیزات Lidar با دقت بالا در سوئیس برای نصب بر روی وسایل نقلیه هوایی بدون سرنشین (پهپادها یا “پهپادها”)، وسایل نقلیه زمینی و کوله پشتی است.
سیستم Lidar Prime plus aOrion Heli-E توسط حسگر Alpha Prime، سنسور دوربرد لیدار در سطح جهانی Velodyne فعال می شود. Lidar Velodyne به همراه گیرنده GNSS درجه بررسی و واحد اندازه گیری اینرسی درجه بالا (IMU) کیفیت، محدوده کاری و قابلیت های لازم برای راه حل های نقشه برداری را برای توپودرون فراهم می کند. این سیستم به کاربران این فرصت را می دهد که ده ها کیلومتر از خطوط برق و ده ها یا حتی صدها کیلومتر مربع از یک منطقه نقشه برداری را ضبط کنند، زمانی که یک بازرسی دستی، هلیکوپتر خلبانی یا یک مولتی کوپتر خطر زیادی ایجاد می کند، بسیار پرهزینه است یا قادر به مقابله با چالش نیست.
Lidar Prime یک سیستم Topodrone Lidar با برد کاری تا 300 متر است که عرض کریدور 500 متر و بیش از 20 کیلومتر مربع در هر پرواز با هلیکوپتر aOrion را پوشش می دهد. به لطف توانایی aOrion برای حمل محموله 5 کیلوگرمی برای بیش از 1.5 ساعت، نقشهبردار میتواند از ابرهای نقطه لیدار با دقت بالا و عکسهای اورتوفوتو خطوط برق طولانی، جادهها و مناطق جنگلی عظیم بگیرد.
در عین حال، طیف گسترده ای از سرعت های کروز (از 7 تا 20 متر بر ثانیه) و انعطاف پذیری برای انتخاب ارتفاعات مختلف پرواز (از چند متر تا صدها متر از سطح زمین) امکان استفاده از تمام محدوده توپودرون لیدار با دقت بالا را فراهم می کند. سیستم ها همراه با دوربین 61 مگاپیکسلی. این از دستیابی به مجموعه داده های دقیق برای نظارت سه بعدی، کارهای کاداستر، طراحی ساخت و ساز جدید، نظارت بر جنگل و اکتشاف پشتیبانی می کند.
Topodrone Lidar Hi-Res بر روی بالگرد aOrion Heli-E.
انجام پرواز و پردازش داده ها
راه حل Lidar Prime plus aOrion Heli-E آسان است. قبل از پرواز، نقشه بردار به سادگی باید باتری های هلیکوپتر را در یک ایستگاه شارژر مخصوص شارژ کند، یک مأموریت بررسی خطی یا منطقه ای را با در نظر گرفتن سطح زمین آماده کند و پرواز را در حالت خودکار اجرا کند. دوربین همگام شده 61 مگاپیکسلی سیستم Topodrone Lidar که روی هلیکوپتر نصب شده است، ابرهای نقطه ای و عکس هایی را برای پردازش داده های آینده می گیرد.
پس از پرواز، نقشه بردار تمام مجموعه داده ها را دانلود می کند و به عنوان اولین گام نرم افزار پس پردازش Topodrone را اجرا می کند تا مسیر دقیق پرواز را به دست آورد و ابرهای نقطه لیدار را در عرض چند دقیقه تولید کند. این نرم افزار نه تنها مراحل اولیه پردازش داده ها را تسهیل می کند، بلکه تراز کردن نوار و کالیبراسیون لیدار را نیز تسهیل می کند. در نتیجه، کاربران ابرهای نقطه لیدار جغرافیایی مرجع آماده برای استفاده را در حالت خودکار برای تجزیه و تحلیل آینده، استخراج زمین، تولید خطوط خطوط و استخراج لایههای CAD دریافت خواهند کرد.
سیستم های لیدار مزایای متعددی از جمله امکان کار در عصر بدون نور خورشید یا حتی در شب و گرفتن زمین در زیر پوشش گیاهی عمیق در ترکیب با زمان پرواز طولانی را ارائه می دهند. در نتیجه، سیستمهای لیدار به طور قابلتوجهی قابلیتهای شرکتهای نظرسنجی را گسترش میدهند و در بسیاری از ساعات کار و هزینهها صرفهجویی میکنند. این آنها را قادر میسازد تا با سیستمهای بزرگ Lidar مبتنی بر هوا که میتوانند تا صد برابر بیشتر از هلیکوپترهای برقی با تجهیزات کوچک و مدرن Topodrone Lidar در هواپیما، قیمت داشته باشند، رقابت کنند.
DJI سری جدید DJI Mavic 3 Enterprise خود را معرفی کرده است که طراحی شده است تا دوباره تصور کند پهپادها چه کارهایی را برای تجارت، دولت، آموزش و امنیت عمومی انجام می دهند. DJI Mavic 3E و DJI Mavic 3T هواپیماهای بدون سرنشین جمع و جور (پهپادها یا «پهپادها») هستند که با ارائه بهترین، ایمن و کارآمدترین فناوری هوایی به کاربران حرفه ای، عملکرد نقشه برداری روزانه را افزایش می دهند. DJI یک رهبر جهانی در پهپادهای غیرنظامی و فناوری دوربین خلاق است.
دو پهپاد جدید Mavic 3 Enterprise بر اساس DNA سری Mavic 3 تولیدکننده پرچمدار DJI ساخته شدهاند و برای عملیات در طیف گستردهای از ماموریتهای تجاری طراحی شدهاند. یک پهپاد DJI Mavic 3 Enterprise ساده، قابل حمل و جمع و جور می تواند با یک دست حمل شود و در یک لحظه به کار گرفته شود. به لطف زمان پروازشان 45 دقیقه، آنها برای انجام وظایف طولانی بسیار مناسب هستند.
ماموریت ما در DJI Enterprise این است که فناوری پهپاد و دوربین خود را در دسترس قرار دهیم تا سازمانها در سراسر جهان بتوانند کار خود را بهتر انجام دهند. کریستینا ژانگ، مدیر ارشد استراتژی شرکت در DJI گفت: سری Mavic 3 Enterprise با یک راه حل قدرتمند همه کاره که می تواند کار را به روشی ساده تر، هوشمندانه تر و ایمن تر انجام دهد، به این وعده عمل می کند. Mavic 3 Enterprise ابزاری بسیار ارزشمند و سودمند برای حفاظت از محیط زیست و حیات وحش، ساخت و ساز، نقشه برداری، انرژی، امنیت عمومی و زمینه های بی شمار دیگر خواهد بود.
پهپاد DJI Mavic 3E Enterprise. (تقدیم از DJI)
نقشه برداری پهپاد با سرعت و دید
ترکیب فوقالعاده ویژگیهای DJI Mavic 3E، مأموریتهای نقشه برداری و نقشه برداری بسیار کارآمد را بدون نیاز به نقاط کنترل زمینی امکانپذیر میسازد. این دوربین دارای یک دوربین 20 مگاپیکسلی با زاویه دید عریض با سنسور CMOS 4/3 اینچی با پیکسلهای بزرگ 3.3 میکرومتر است که همراه با حالت هوشمند در نور کم، عملکرد قابلتوجهی را در شرایط کم نور ارائه میکند. زوم هیبریدی قدرتمند تا 56 برابر آن دوربین دارای فاصله کانونی معادل 162 میلی متر برای تصاویر 12 مگاپیکسلی است. یک شاتر مکانیکی از تاری حرکت جلوگیری می کند و از عکاسی با فاصله 0.7 ثانیه سریع پشتیبانی می کند.
DJI Mavic 3T که برای پاسخگویی به نیازهای ویژه عملیات هوایی در آتش نشانی، جستجو و نجات، بازرسی و ماموریت های شبانه طراحی شده است، دارای دوربین تله مشابه Mavic 3E، دوربین 48 مگاپیکسلی با سنسور CMOS 1/2 اینچی و همچنین دوربین حرارتی با میدان دید (DFOV) 61 درجه و فاصله کانونی معادل 40 میلی متر با وضوح 640 × 512 پیکسل.
دوربین حرارتی Mavic 3T از اندازهگیری دمای نقطه و ناحیه، هشدارهای دمای بالا، پالتهای رنگی و ایزوترم پشتیبانی میکند تا به متخصصان کمک کند نقاط داغ را پیدا کنند و تصمیمگیری سریع بگیرند. دوربینهای حرارتی و زوم Mavic 3T با بزرگنمایی همزمان با تقسیم صفحه، از زوم دیجیتال 28× پیوسته کنار هم برای مقایسه آسان پشتیبانی میکنند.
مجموعه جدیدی از ابزارهای نقشه برداری هواپیماهای بدون سرنشین برای متخصصان زمین فضایی
سری Mavic 3 Enterprise با ابزارهای جدید ترکیبی از لوازم جانبی و نرم افزار برای ماموریت های حرفه ای عرضه می شود. DJI RC Pro Enterprise یک کنترل از راه دور حرفه ای با صفحه نمایش 1000 نیت با روشنایی بالا برای دید واضح در زیر نور مستقیم خورشید و یک میکروفون داخلی برای ارتباط واضح است. ماژول RTK متخصصان نقشه برداری را قادر می سازد تا با پشتیبانی از شبکه RTK، خدمات شبکه سفارشی RTK و ایستگاه موبایل D-RTK 2 به دقت در سطح سانتی متر دست یابند.
این گیرنده GNSS با دقت بالا ارتقا یافته DJI است که از تمام سیستم های ناوبری ماهواره ای جهانی پشتیبانی می کند و اصلاحات دیفرانسیل بلادرنگ را ارائه می دهد. با وصل کردن بلندگو، خلبانان میتوانند پیامی را از بالا با پشتیبانی از تبدیل متن به گفتار، ذخیرهسازی صدا و حلقهگذاری برای بهبود کارایی جستجو و نجات پخش کنند.
مجموعه نرم افزار کامل
پهپادهای سری Mavic 3 Enterprise در مرکز یک اکوسیستم نرم افزاری پیشرفته و رو به رشد برای عملیات پهپاد قرار دارند و به پلتفرم های هوایی اجازه می دهند تا به پتانسیل کامل خود به عنوان ابزاری برای جمع آوری داده ها، نقشه برداری، مدیریت ناوگان و عملیات پرواز دست یابند. DJI Pilot 2 رابط پروازی اصلاح شده ای است که برای بهبود کارایی خلبانی و ایمنی پرواز طراحی شده است. با یک ضربه می توان به راحتی به کنترل های پهپاد و محموله دسترسی پیدا کرد. کاربران می توانند به سخت افزار، پخش زنده ویدیویی و داده های عکس پهپاد دسترسی داشته باشند.
DJI FlightHub 2 نرم افزار مدیریت عملیات ابری یکپارچه برای ناوگان هواپیماهای بدون سرنشین است که به اپراتورهای هواپیماهای بدون سرنشین اجازه می دهد تا با برنامه ریزی مسیر و مدیریت ماموریت، عملیات پرواز را به طور مؤثر مدیریت کنند. DJI Terra نرم افزار نقشه برداری با امکانات کامل برای تمام مراحل کار، از برنامه ریزی ماموریت تا پردازش مدل های دو بعدی و سه بعدی است. در نهایت، DJI Thermal Analysis Tool 3.0 به متخصصان کمک می کند تا تصاویر گرفته شده توسط Mavic 3T را با استفاده از DTAT 3.0 تجزیه و تحلیل، حاشیه نویسی و پردازش کنند تا ناهنجاری های دما را در بازرسی های خود تشخیص دهند.
جزایر فارو که در شمال اقیانوس اطلس قرار دارند و تقریباً از اسکاتلند، ایسلند و نروژ فاصله دارند، مجمع الجزایری ناهموار و صخره ای را تشکیل می دهند. هوای خنک و ابری، همراه با بادهای شدید و بارش باران شدید در تمام طول سال، به این معنی است که این یک محیط بررسی چالش برانگیز است. مقامات نقشه برداری در جستجوی بهترین روش برای ثبت این محیط خیره کننده به پهپادها روی آورده اند. این مقاله داستان نقشه برداری و بررسی یک نقطه واقعا نفس گیر در زمین را بیان می کند.
آب و هوا همیشه یک عامل در 18 جزیره و اطراف آن است که جزایر فارو را تشکیل می دهند. باد یا باران بیش از حد، خبر بدی برای نقشهبرداران است. در گذشته، Umhvørvisstovan (آژانس محیط زیست فارو، که مسئول نقشه برداری و نظارت بر پیشرفت در سراسر جزایر، از جمله نقشه برداری خطوط ساحلی است) از هواپیما برای گرفتن تصاویر مورد نیاز برای نقشه برداری و نقشه برداری استفاده می کرد.
با این حال، این بدون محدودیت نبود، زیرا هواپیما باید چند روز قبل از شرکت های فتوگرامتری در دانمارک یا ایسلند رزرو می شد. این اغلب با توجه به آب و هوای متغیر در منطقه دشوار بود – به ویژه در دوره هایی که اکثر شرکت ها مشغول ثبت تصاویر در جاهای دیگر بودند.
نقشه ای که موقعیت جزایر فارو را نسبت به بقیه اروپا نشان می دهد.
روی آوردن به نقشه برداری هوایی بدون خدمه
بنابراین در سال 2015، Umhvørvisstovan تصمیم گرفت به جای هواپیماها با وسایل نقلیه هوایی بدون سرنشین (پهپادها یا “پهپادها”) کار کند. تیم بررسی محلی در مورد نقاط قوت فتوگرامتری هواپیماهای بدون سرنشین تحقیق کردند و دریافتند که دادههای جغرافیایی گرفتهشده توسط پهپاد میتوانند با کار و تلاش کمتری نسبت به فتوگرامتری مبتنی بر هواپیما، عکسهای ارتوفوتوگرافی تولید کنند.
مزایای صرفه جویی در نیروی کار به عنوان یک مزیت مهم در نظر گرفته شد، زیرا تنها شش کارمند برای انجام تمام مسئولیت های نقشه برداری در Umhvørvisstovan وجود دارد. سه نفر از آنها بر روی نقشه برداری و نقشه برداری در خشکی کار می کنند، در حالی که سه نفر دیگر روی نمودارهای دریایی برای کشتی ها و کشتی ها کار می کنند (به زیر مراجعه کنید).
مزیت دیگر این است که هنگام استفاده از هواپیماهای بدون سرنشین، آسمان صاف ضروری نیست. در واقع، تا زمانی که پهپاد بتواند زیر ابرها کار کند، گاهی اوقات نتیجه با پوشش ابر بهتر است. با این حال، آب و هوای بد در اوایل سال جاری به این معنی بود که Umhvørvisstovan تا نیمه دوم مه 2021 قادر به جمعآوری دادهای با استفاده از پهپادها نبود.
حتی در شرایط آرامتر، مه گاهی اوقات مشکل ایجاد میکرد – بهخصوص زمانی که در پایینترین حد ممکن بود. ارتفاع پرواز پهپاد مه میتواند حسگر زمینی را فعال کند، در نتیجه سیستم ایمنی پهپاد را فعال میکند، بدون ذکر این واقعیت که تصاویر جمعآوریشده هنگام پرواز در مه غیرقابل استفاده هستند.
بنابراین در سال 2015، شرکت دانمارکی COWI که قبلاً تجربه گسترده ای در نقشه برداری هواپیماهای بدون سرنشین داشت، یک خلبان هواپیمای بدون سرنشین را به جزایر فارو فرستاد که وظیفه جمع آوری تصاویر پایتخت (تورشاون) و دومین شهر بزرگ (کلاکسویک) را داشت. این پروژه با موفقیت فاروئی ها را در مورد قابلیت های پهپادها برای برنامه های نقشه برداری متقاعد کرد و کمتر از یک سال بعد تیم شروع به خرید پهپادها برای خود کرد. پس از مدتی تحقیق، آنها در نهایت دو پهپاد بال ثابت FX-61 را با نصب Pixhawk از شرکت دانمارکی Nordic Drone خریداری کردند. بعداً، در سال 2020، یک eBee X برای تکمیل ناوگان خریداری شد.
کوهنوردی که صخرههای درانگارنیر – پشته دریایی نمادین با سوراخی در آن – در جزایر فارو را تحسین میکند. (با احترام: Shutterstock)
انعطاف پذیری و سایر مزایا
برای Umhvørvisstovan، مزیت کلیدی پهپادها انعطاف پذیری آنهاست. یکی دیگر از مزایای عمده نقشه برداران فاروئی این واقعیت است که نقشه برداری پهپاد مستلزم یک گردش کار نسبتاً کوتاه است، از جمع آوری داده ها تا محصولات نهایی. این بدان معنی است که تصاویر به سرعت در دسترس هستند، به علاوه نقشه برداران از کنترل هر مرحله از فرآیند قدردانی می کنند. اکنون، در صورت وجود هرگونه خطا یا دادههای غیرقابل اعتماد، نقشهبرداران میتوانند خطاها را تصحیح کنند یا خودشان به سرعت دادههای جدید را جمعآوری کنند، بدون اینکه به دیگران وابسته باشند.
سهولت استفاده و نتایج با کیفیت بالا
در مکانی منحصر به فرد مانند جزایر فارو، واقع در وسط اقیانوس اطلس، نقشه برداری هوایی از جزایر به دور از یک پروژه پیمایشی پیشرو است و مستلزم پیشگامی های زیادی است. برای انجام ماموریت های چالش برانگیز به طور موثر و ایمن، دانستن توانایی ها و همچنین محدودیت های پهپاد و نحوه واکنش آن در شرایط مختلف مهم است. استفاده Umhvørvisstovan از پهپادها بدون اشتباه نبوده است، اما آنها در نهایت تیم را قادر می سازند تا تجربیات ارزشمند زیادی را به دست آورد.
هدف اصلی نقشه برداری از تمام مناطق شهری در جزایر است و نقشه هایی که از تصاویر گرفته شده ایجاد می شود عمدتاً برای برنامه ریزی زمین و برای ثبت ملی استفاده می شود. .شهرداری Tórshavn حتی پهپاد مخصوص به خود را دارد تا بتواند نقشه شهر را با نرخی بالاتر از توانایی آژانس تهیه کند. از سال 2017، Umhvørvisstovan 117130 تصویر با وضوح بالا جمع آوری کرده است که به طور متوسط تقریباً 30000 در سال است. نقشه های مبتنی بر پهپاد دارای میانگین فاصله نمونه برداری از زمین 3 سانتی متر هستند که به طور قابل توجهی بالاتر از قبل است.
هر دو پهپاد در ناوگان Umhvørvisstovan – پهپاد Phantom FX-61 با بال ثابت مجهز به دوربین Pixhawk و SenseFly eBee X با دوربین Aerial X – برای پروژههای مختلف بسیار خوب عمل کردهاند. تیم متوجه شد که این دو سیستم مزایا و معایبی دارند.
اکوسیستم SenseFly بسیار قوی و کاربرپسند است، در حالی که تنظیمات Pixhawk و Mission Planner از مزیت تعمیر و نگهداری سریع مانند در مورد فرود سخت یا هنگام تعویض سروو برخوردار است. هر دو پهپاد همچنین نشان دادهاند که میتوانند به خوبی با شرایط اغلب بادی و متلاطم بالای جزایر فارو کنار بیایند.
برای پردازش، این تیم از زمانی که کار با پهپادها را آغاز کردند، از Pix4D استفاده کردند. آنها دریافته اند که این نرم افزار فتوگرامتری/نقشه برداری بسیار موثر و قوی است که نتایج با کیفیت بالا را همراه با سهولت استفاده ارائه می دهد.
خروجی ابر نقطه ای دقیق و واضح از بررسی پهپاد از جزایر فارو.
نقشه برداری از یک جزیره کوچک
اخیرا، Umhvørvisstovan جزیره کوچک Svínoy (با اندازه 2.34 کیلومتر مربع) را نقشه برداری کرد. ماموریت جمع آوری داده ها به سه پرواز تقسیم شد که در مجموع 1997 تصویر بر اساس برنامه ریزی دقیق پرواز برای صرفه جویی در وقت خلبان جمع آوری شد. باد، مطمئناً طبق استانداردهای فاروئی، در طول پروازها ملایم بود. اگرچه مقداری آشفتگی وجود داشت و چیدمان زمین چالش برانگیز بود، eBee X توانست با خیال راحت در برخی از فضاهای مسطح در Svínoy بلند شود و فرود بیاید.
دادههای گرفتهشده در Pix4Dmatic پردازش شدند، که کمی بیش از ده ساعت طول کشید تا کل مجموعه دادهها خرد شود. سپس نقشه نهایی ویرایش و حاشیه نویسی شد تا جزئیات مهمی مانند خطوط ساحلی، مسکن – از جمله نام جاده ها و آدرس ها – و همچنین مزارع و زمین های کشاورزی اضافه شود. نقشه به دست آمده برای دانلود رایگان به عنوان یک منبع دسترسی آزاد در دسترس است.
نمای جامع Svínoy ارائه شده در نرم افزار Pix4Dmatic.
همگام شدن با آخرین هنر در نقشه برداری
یک درس مهم برای Umhvørvisstovan این بوده است که به اشتراک گذاشتن تجربیات با دیگر خلبانان پهپاد راهی موثر برای یادگیری و آماده ماندن برای چالش های پیش بینی نشده است. در این زمینه، تیم کوچکی از متخصصان زمینفضایی جزایر فارو روابط نزدیکی با سایر خلبانان پهپاد دارند – بهویژه در کشورهای شمال اروپا. در این شبکه از خلبانان پهپاد، آنها گرد هم می آیند تا در مورد چالش ها بحث کنند، در مورد مسائل به یکدیگر کمک کنند و نحوه عملکرد کشورشان از نظر نقشه برداری و سایر موارد را به اشتراک بگذارند.
تیم Umhvørvisstovan مشتاق همگام شدن با امکاناتی است که فناوری جدید به ارمغان می آورد و شرکت در کنفرانس ها در صنعت نقشه برداری و GIS را به عنوان راه ارزشمند دیگری برای یادگیری در مورد آخرین روندها و پیشرفت ها می دانند. با وجود موقعیت ایزوله، زیرساخت ارتباطی جزایر فارو بسیار مدرن است. بنابراین، در عصر فناوری امروزی که اطلاعات با سرعت رعد و برق حرکت میکنند، بهروز ماندن در مورد جدیدترین فناوری نقشهبرداری برای تیم نسبتاً آسان است و بدون شک پروژههای نقشهبرداری موفقتری را انجام خواهند داد. در آینده.
قدردانی
نوشتن این مقاله بدون کمک فوق العاده آندریاس کلاین آرنبیرگ، خلبان هواپیمای بدون سرنشین در Umhvørvisstovan ممکن نبود.
هیدروگرافی جزایر فارو
از آنجایی که جزایر فارو در اقیانوس اطلس واقع شده اند، نقشه برداری ساحلی و هیدروگرافیک نیز ستون مهمی برای مقامات است. مسئولیت هیدروگرافی و نقشه برداری در ژانویه 2020 از مقامات دانمارکی به مقامات فارو واگذار شد. بستر دریای فارو 300000 کیلومتر مربع را پوشش می دهد و می تواند تا عمق 3.6 کیلومتری در شمال برسد. با این حال، یک کشور کوچک گاهی اوقات می تواند یک مزیت باشد. اداره هیدروگرافی و اداره زمین و نقشه برداری در جزایر فارو در واقع در یک بخش در Umhvørvisstovan هستند. این بدان معناست که خشکی و دریا دقیقاً در کنار یکدیگر قرار دارند که فرصتهای همکاری بزرگی را ارائه میدهد.
دفتر هیدروگرافی در Umhvørvisstovan تنها شامل سه نفر از کارکنان است که بر روی هیدروگرافی، نقشه برداری و مدیریت تمرکز دارند. این مسئولیت شامل هشت نمودار کاغذی دریایی و 21 نمودار ناوبری الکترونیکی است. علاوه بر این، هاوستووان (موسسه تحقیقات دریایی فارو) اخیراً یک کشتی تحقیقاتی جدید به طول 54 متر را راه اندازی کرده است که یک سیستم چند پرتوی Kongsberg EM712 را در خود جای داده است. Umhvørvisstovan مسئول عملیات این است و داده های آب متوسط تا عمیق را جمع آوری می کند. Landsverk (سازمان راه های فاروئی) مسئول جمع آوری داده های سطح و داده های عمق سنجی برای نظارت بر تغییرات در بنادر و بنادر است.
نقشه برداری موبایل با… گوسفند!
چند سال پیش، مجمع الجزایر فارو یکی از معدود مکان هایی بود که در نمای خیابان گوگل در دسترس نبود. از آنجایی که به نظر میرسید گوگل قصدی برای نقشهبرداری از جزایر فارو برای آینده قابل پیشبینی ندارد، یکی از کارمندان هیئت گردشگری جزایر فارو راهحل خود را ارائه کرد. به جای «نمای خیابان»، او ترتیبی داد تا یک چوپان محلی و گوسفندانش با اتصال دوربینهایی به گوسفندها، «نمای گوسفند 360» را تولید کنند تا از محیط اطراف هنگام حرکت آنها عکس بگیرند. از آنجایی که این جزایر بیشتر از گوسفندان جمعیت دارند، این راه حل نقشه برداری سیار از نظر سادگی بسیار عالی بود.
پس از شنیدن پروژه Sheep View، گوگل با اشتیاق پاسخ داد و جزایر فارو را با نمای خیابان Trekker و دوربین های 360 درجه عرضه کرد. این امر به ساکنان و گردشگران این امکان را داد تا به گوسفندان در ثبت تصاویر مجمع الجزایر زیبا کمک کنند. به لطف این تلاشها، Google Street View اکنون جزایر فارو را شامل میشود.
در بخش علوم زمین، حسگرهای اندازهگیری ویژگیهای زمین به سرعت برای استفاده از هواپیماهای بدون سرنشین سازگار میشوند، زیرا پیشرفتهای جدید در فناوری منجر به افزایش اندازه و بار وسایل نقلیه هوایی بدون سرنشین (پهپادها یا پهپادها) شده است. این مقاله دو مطالعه را ارائه میکند که فرصتهایی را برای افزودن طیفسنج پرتو گاما به یک پهپاد به منظور ترسیم بافت یا آلودگی خاک بررسی میکند.
طیف سنج های پرتو گاما سنت طولانی استفاده به عنوان یک ابزار ژئوفیزیکی برای نقشه برداری خواص خاک و رسوب دارند، اما اندازه و وزن بزرگ آنها تاکنون مانع از استفاده این حسگرها در کاربردهای پهپادها شده است. با این حال، پیشرفتهای اخیر در سختافزار حسگر، همراه با الگوریتمهای پردازش دادهها که استخراج آخرین تکه اطلاعات از دادههای بهدستآمده را امکانپذیر میسازد، منجر به تولید طیفسنجهای پرتو گاما با وزن کمتر از ۳ کیلوگرم شده است. این کاهش وزن قابل توجه به این معنی است که اکنون می توان آنها را به هواپیماهای بدون سرنشین متصل کرد و طیف جدیدی از کاربردها را برای استفاده از طیف سنج های پرتو گاما در بررسی های هوابرد باز می کند.
از سنسور تا نقشه خاک
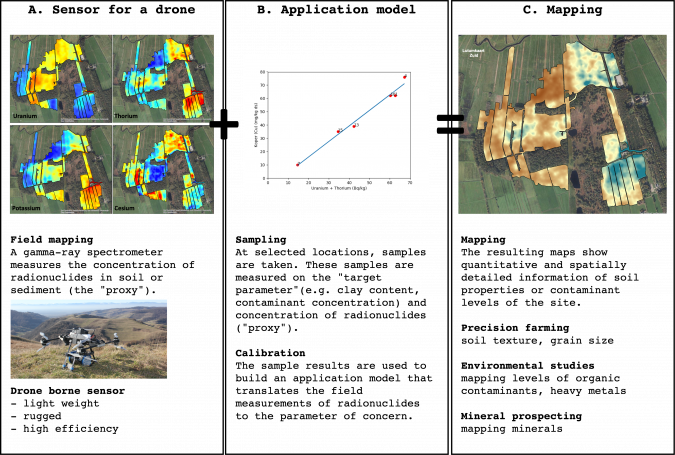
یک طیف سنج پرتو گاما به طور مستقیم غلظت رادیونوکلئیدهای موجود در محیط را اندازه گیری می کند، خواه رادیونوکلئیدهای طبیعی مانند پتاسیم، اورانیوم و توریم و یا رادیونوکلئیدهای مصنوعی مانند سزیم (137Cs). این اندازهگیریها ورودی مدلهای کاربردی را فراهم میکند که غلظت پرتوزا با ویژگی خاک یا آلاینده مورد نظر مرتبط است. برای انجام این کار، بسیار مهم است که اندازه گیری های میدانی نتایج کمی و دقیق را ارائه دهند. بنابراین کالیبراسیون مناسب سنسور و انتخاب مناسب اندازه سنسور در رابطه با کاربرد آن ضروری است.
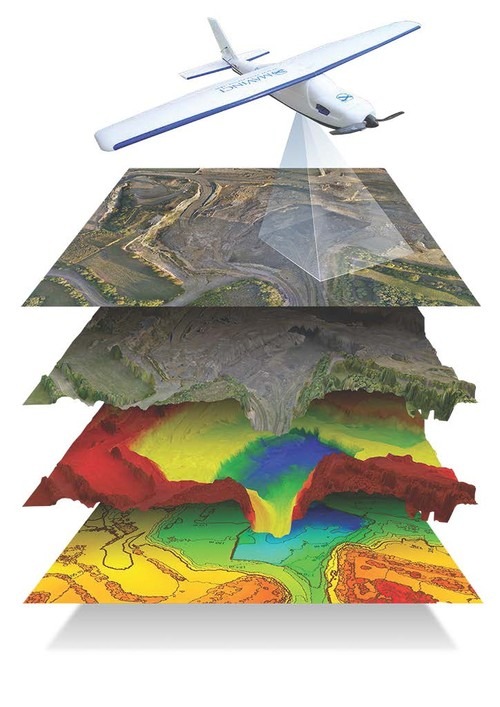
حسگرهای پرتو گاما را می توان برای نقشه برداری خاک، مطالعات زیست محیطی و استخراج معادن بر اساس رویکرد سه مرحله ای استفاده کرد (شکل 1). این کار با اتصال یک حسگر زیر یک پهپاد برای اندازه گیری رادیونوکلئیدها شروع می شود. در مرحله بعد، یک مدل کاربردی توسعه داده می شود که داده های اندازه گیری شده را به پارامترهای خاک ترجمه می کند. سپس می توان نقشه های ویژگی های مورد علاقه را تولید کرد.
شکل 1: رویکرد سه مرحله ای برای نگاشت مبتنی بر حسگر، توسعه یک مدل کاربردی و تولید نقشه برای کاربر نهایی.
مطالعه مقایسه نقشه خاک
برای ترسیم ترکیب خاک، یک طیف سنج پرتو گاما اغلب با استفاده از وسیله نقلیه زمینی مانند تراکتور، گاتور یا کواد استفاده می شود. با این حال، استفاده از پهپاد این امکان را فراهم میکند که ویژگیهای خاک زمینهایی را که دسترسی به آن دشوار است، مانند زمانی که زمین پوشیده از پوشش گیاهی است یا دسترسی به مزرعه نامطلوب است، ترسیم کند.
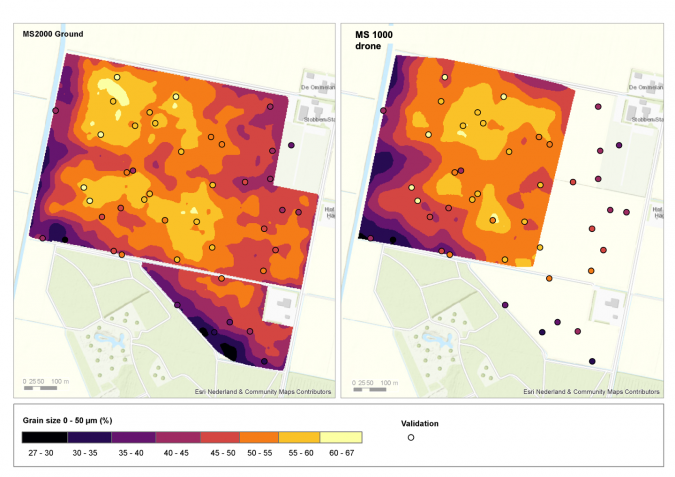
برای ارزیابی کیفیت نقشههای حاصل که توسط یک طیفسنج پرتو گاما نصب شده در زیر یک پهپاد اندازهگیری شد، نویسندگان مطالعه مقایسهای را برای پیشبینی ویژگیهای فیزیکی خاک ۴۰ هکتار از زمینهای کشاورزی در فلوولند، هلند طراحی کردند. در این پروژه، اندازهگیریها با استفاده از یک طیفسنج پرتو گاما (حسگر MS-2000 از Medusa Radiometrics) که روی یک تراکتور نصب شده بود، با اندازهگیریهای یک طیفسنج پرتو گامای هواپیمای بدون سرنشین (سنسور MS-1000 از Medusa Radiometrics) و با اندازهگیریها مقایسه شد.
نمونه های سنتی خاک MS-1000 یک سیستم آشکارساز پرتو گاما کم مصرف، سبک و قوی است که مخصوص استفاده با هواپیماهای بدون سرنشین طراحی شده است. این حسگر که 7.7 کیلوگرم وزن دارد، تحت یک پهپاد استاندارد و تجاری (DJI M600 PRO) نصب شده است. این پهپاد در ارتفاع متوسط 14 متری با خطوط بررسی 30 متری پرواز کرد.
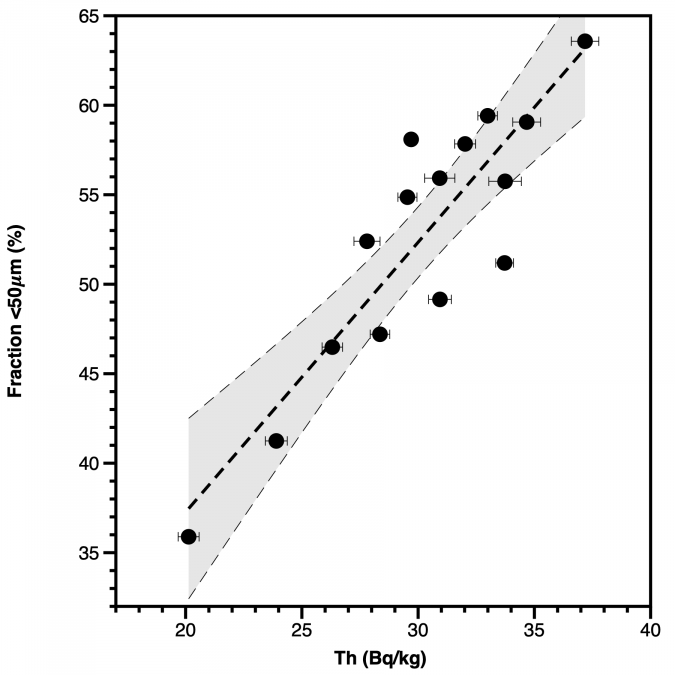
مدل کاربردی در این مطالعه بر اساس 14 نمونه خاک برداشت شده و در آزمایشگاه بر روی محتوای رادیونوکلئید و کسر رس آنالیز شد. از مدل (شکل 2) برای ترجمه مقادیر میدان 232Th به نقشه ای استفاده شد که غلظت ریزدانه ها (<50μm) را نشان می دهد.
شکل 2: مدل کاربرد برای ترجمه غلظت توریم (Bq/kg) به کسر خاک رس، که به عنوان اندازه دانه <50 میکرومتر تعریف شده است، استفاده شد.
شکل 3 نقشههای حاصل را نشان میدهد که این مدل کاربردی برای ترجمه غلظت فضایی 232th به تغییرات اندازه دانه فضایی استفاده شد. اندازهگیریهای زمینی، تغییرات محتوای خاک رس را هنگام اندازهگیری آن با آشکارساز MS-2000 در تراکتور نشان میدهد. نقشه هوابرد، محتوای خاک رس را بر اساس اندازهگیریهای با استفاده از آشکارساز هواپیمای بدون سرنشین MS-1000 نشان میدهد. مجموعه جداگانه ای از 44 نمونه خاک برداشت شد و برای اعتبار سنجی آماری مستقل استفاده شد.
نقشههای اندازهگیریهای زمینی و اندازهگیریهای هواپیمای بدون سرنشین مطابقت نزدیکی دارند، اما نتایج حاصل از پهپاد «صافتر» هستند و وضوح فضایی کمتری را نشان میدهند. این تفاوت در اندازه ساختارهای فضایی قابل انتظار است زیرا پهپاد تابش را از یک منطقه بزرگتر می گیرد و در نتیجه ردپای بزرگتری دارد. تجزیه و تحلیل دقیقتر و اعتبارسنجی نقشهها نشان داد که کیفیت نقشه هواپیمای بدون سرنشین با بررسی زمینی برابری میکند و هر دو رویکرد به خوبی نمونهبرداری از خاک هستند.
شکل 3: نقشه اندازه دانه برگرفته از بررسی زمینی (سمت چپ) و بررسی هوایی (راست). نقاط نشان دهنده نقاط نمونه مستقل مورد استفاده در اعتبار سنجی هستند.
نقشه برداری آلودگی خاک
آلودگی محیطی ناشی از فعالیت های انسانی به عنوان یکی از خطرات مدرن پیشرفت های صنعتی جامعه شناخته شده است. این آلودگی شامل آلایندههای آلی و فلزات سنگین به دلیل انتشار تاریخی توسط شیوههای صنعتی فعلی و سابق است. از آنجایی که آلاینده ها می توانند با جذب موجودات زنده وارد زنجیره غذایی شوند، بازسازی محیطی یا بسته شدن مکان های آلوده در اولویت است.
رویکرد فعلی برای مدیریت و نظارت بر سایتهای آلوده شامل روشهای تهاجمی و اغلب کار فشرده است، بهویژه به منظور جمعآوری نمونهها برای تعیین کمیت و نقشهبرداری توزیع آلایندهها. در نتیجه، خطوط توزیع آلاینده بر اساس نمونهها، بسته به اندازه نمونه و فاصله بین نمونهها در معرض تعدادی خطای بالقوه است، با این خطر که «نقاط داغ» بدون نقشه باقی بمانند.
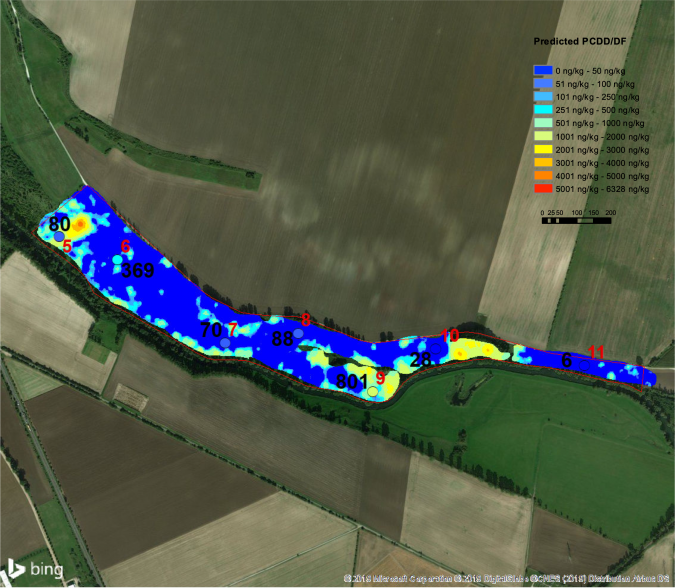
بسیاری از آلاینده ها در رسوبات آبی به ذرات رس جذب می شوند. این بدان معنی است که سطوح آلاینده به شدت با ترکیب این رسوبات در هنگام زیر آب، یا زمانی که رسوبات در دشت های سیلابی رسوب می کنند، مرتبط است. در نهر Spittelwasser، یکی از شاخه های رودخانه البه در آلمان، دشت های سیلابی به عنوان حوضه های انباشته برای فاضلاب های بسیار آلوده در طول حوادث سیل مورد استفاده قرار می گرفت و باعث می شد که آنها با مواد شیمیایی آلی مانند دیوکسین ها آلوده شوند.
دشت های سیلابی قبلاً موضوع تحقیقات متعددی در مورد آلودگی رسوبات و خاک بوده است. تصمیم برای انجام یک بررسی نقشه برداری از طریق هواپیماهای بدون سرنشین گرفته شد، تا حدی به این دلیل که دسترسی به برخی از مناطق از نظر فیزیکی دشوار بود و تا حدودی به دلیل ناشناخته بودن مالکان زمین برای برخی از مناطق، که به این معنی بود که مجوز دسترسی نمی توانست به دست آورد. برای بررسی هوابرد، MS-1000 زیر یک پهپاد DJI M600 نصب شد. این پهپاد در ارتفاع متوسط 7 متری با خطوط بررسی به فاصله 10 متر از هم پرواز کرد و این امکان را فراهم کرد که این سایت 50 هکتاری تنها در سه روز نقشه برداری شود.
شکل 4: طیف سنج پرتو گاما MS-1000 که تحت یک پهپاد تجاری استاندارد DJI M600 نصب شده است.
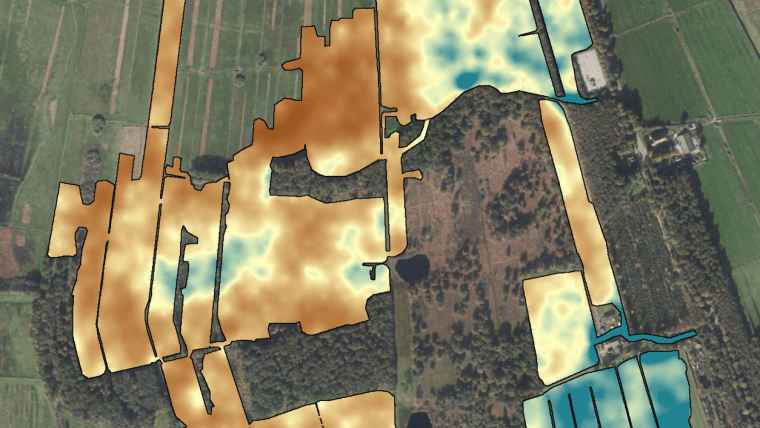
این بررسی منجر به نقشه های یکپارچه سطوح آلاینده رسوب شد (شکل 5) که نشان می دهد اکثریت منطقه دارای غلظت نسبتاً کم آلاینده است، اما برخی از نقاط داغ وجود دارد. این داده ها اطلاعات دقیقی را در مورد آلودگی در مقیاس حوضه رودخانه به دولت ارائه می دهد که برای تعریف اقدامات اصلاحی مناسب بسیار مهم است.
نتیجه گیری
صنعت نقشه برداری جغرافیایی در سال های اخیر به دلیل استفاده از پهپادها برای تهیه نقشه های سطح زمین تغییرات قابل توجهی داشته است. تاکنون استفاده از پهپادها در حوزه ژئوفیزیک محدود بوده است و بیشتر این کار با بررسی های زمینی یا بررسی از هواپیماهای بزرگتر انجام می شود. با این حال، صنعت ژئوفیزیک به تکامل خود ادامه میدهد و حسگرها کوچکتر، سبکتر و کاربرپسندتر شدهاند. این حسگرهای کوچکتر اکنون می توانند در ترکیب با هواپیماهای بدون سرنشین برای نقشه برداری از بافت خاک و آلودگی خاک با وضوح مکانی بالا استفاده شوند.
هر دو پیمایش هواپیمای بدون سرنشین ارائه شده در این مقاله با استفاده از یک پهپاد خارج از قفسه و یک طیف سنج پرتو گاما اجرا شدند. اولین مطالعه نشان داد که چگونه بافت خاک را می توان با استفاده از چنین تنظیماتی ترسیم کرد. مطالعه دوم نشان داد که از همین تنظیمات می توان برای نقشه برداری از آلاینده ها با وضوح فضایی بی سابقه استفاده کرد. این نتایج نشان میدهد که حسگرهای پرتو گاما برای استفاده معمول در پروژههای نقشهبرداری هواپیمای بدون سرنشین آماده هستند. این امکان را برای انجام نقشه برداری با وضوح بالا از بافت خاک و آلودگی خاک در مناطقی که در غیر این صورت غیرقابل دسترس بودند، باز می کند.
شکل 5: غلظت دیوکسین (PCDD/DF) در یک منطقه از دشت های سیلابی. نقاط نشان دهنده مکان های نمونه هستند و مقیاس رنگ آنها با رنگ های نقشه یکسان است.
طیف سنج پرتو گاما چیست؟
یک طیف سنج پرتو گاما غلظت عناصر رادیواکتیو را در زمین اندازه گیری می کند. همه سنگها، خاک و رسوبات حاوی آثار کوچک اما قابل اندازهگیری از رادیونوکلئیدهای طبیعی مانند پتاسیم (40K)، اورانیوم (238U) و توریم (232Th) هستند. تابش ساطع شده توسط این هسته ها حاوی اطلاعاتی در مورد ترکیب کانی شناسی سنگ ها و خاک ها است. این پدیده، به عنوان مثال، در اکتشاف نفت و گاز و مواد معدنی برای به دست آوردن تصویری کیفی از ترکیب معدنی یک منطقه یا ماتریس سنگ استفاده می شود.
توجه به این نکته مهم است که برخلاف بسیاری از فناوریهای ژئوفیزیک دیگر، طیفسنجهای پرتو گاما حسگرهای غیرفعال هستند. آنها به جای انتشار تشعشع، آن را جذب می کنند. احتمال جذب و در نتیجه راندمان تشخیص مستقیماً با حجم آشکارساز متناسب است. بنابراین، یک آشکارساز بزرگتر به معنای کارایی بهتر است. این وابستگی به اندازه دلیلی است که در نقشه برداری سنتی هوابرد، از بسته های آشکارساز چند کریستالی بزرگ 80 کیلوگرمی استفاده می شود. با این حال، پیشرفتهای اخیر منجر به حسگرهای بسیار سبکتر شده است که استفاده از طیفسنجهای پرتو گاما را در زیر هواپیماهای بدون سرنشین امکانپذیر میسازد.
سپاسگزاریها
پروژه های نقشه برداری شرح داده شده برای Landesanstalt für Altlastenfreistellung (LAF) در Sachsen Anhalt، آلمان، و برای Wageningen Environmental Research، هلند انجام شد.
Teledyne Geospatial Optech CLS-A را معرفی کرده است، یک پهپاد جدید با درجه نظرسنجی Lidar و سیستم دوربین. محدودیت های عملیات پهپاد Optech CLS-A برای کاربردهای نقشه برداری و بازرسی با کیفیت بالا توسعه داده شده است که در آن ادغام دقیق یک لیزر واگرایی پرتو باریک قدرتمند، IMU با دقت بالا، دوربین کالیبره شده و نرم افزار قدرتمند پس از پردازش، جمع آوری کارآمد منطقه وسیع را در مقررات مجاز فراهم می کند.
Optech CLS-A اسکنر CL-360XR Lidar را با واگرایی پرتو 0.3 میلیرادی پیشرو در صنعت، میدان دید 360 درجه و دقت و صحت در درجه بررسی ادغام میکند. CL-360XR جمع آوری داده های توپوگرافی Lidar را از ارتفاع 120 متری یا بالاتر از طریق زمین های با پوشش گیاهی و ارتفاعات متنوع امکان پذیر می کند. Lidar با یک دوربین دیجیتال شاتر جهانی با میدان دید 80 درجه کالیبره شده جفت می شود که رنگ آمیزی و بازرسی با وضوح بالا را امکان پذیر می کند. دادههای جمعآوریشده با سیستمهای Optech CLS-A، ALTM Galaxy و Lynx میتوانند به طور همزمان از طریق یک گردش کار مشترک در Optech LMS Professional پردازش شوند.
بررسی های مهندسی سطح سخت
بسته به ترجیح کاربر، CLS-A را می توان به راحتی در انواع پلتفرم های پهپاد ادغام کرد. این ادغام را می توان با قدرت کم، یک پایه مکانیکی ایزوله و یک آنتن GNSS تکمیل کرد. CLS-A برای ارائه نتایج با کیفیت بالا برای کاربردهایی مانند بررسی های مهندسی سطح سخت، مدیریت پوشش گیاهی کاربردی، بررسی های توپوگرافی، نظارت راهروها، جاده ها/روسازی ها، راه آهن، جنگلداری، ساخت و ساز، معدن و باستان شناسی طراحی شده است.
ما بسیار هیجانزده هستیم که اولین راهحل Lidar Teledyne Geospatial را معرفی کنیم که دادههای درجه نظرسنجی را از یک پلت فرم پهپاد ارائه میدهد. Mark Treiber، مدیر محصول، Autonomous Solutions در Teledyne Optech، اظهار داشت که Optech CLS-A بدون زحمت در جریان های کاری پس از پردازش ALTM Galaxy و Lynx قرار می گیرد تا سخت ترین الزامات کیفیت داده را برآورده کند.
پروژه AUAV در آلمان تنظیم بلوک بسته نرم افزاری فتوگرامتری را با ارجاع جغرافیایی مستقیم ابرهای نقطه Lidar یکپارچه کرده است تا دقت مربوطه را به میزان قابل توجهی بهبود بخشد.
سکوهای اخیر وسایل نقلیه هوایی بدون سرنشین (UAV یا “پهپاد”) به طور مشترک تصاویر و داده های Lidar را جمع آوری می کنند. ارزیابی ترکیبی آنها به طور بالقوه ابرهای نقطه سه بعدی را با دقت و وضوح چند میلی متری ایجاد می کند که تا کنون محدود به جمع آوری داده های زمینی است. این مقاله پروژه ای را تشریح می کند که تنظیم بلوک بسته نرم افزاری فتوگرامتری را با ارجاع جغرافیایی مستقیم ابرهای نقطه لیدار ادغام می کند تا دقت مربوطه را با یک مرتبه قدر بهبود بخشد. مزایای دیگر پردازش ترکیبی ناشی از افزودن اندازهگیری محدوده Lidar به تطبیق تصویر چند نمای استریو (MVS) در طول تولید ابرهای نقطه سهبعدی متراکم با دقت بالا است.
این پروژه با هدف نظارت بر منطقه فرونشست احتمالی حدود 10 میلی متر در سال توسط مجموعه ای مکرر از ابرهای نقطه سه بعدی بسیار دقیق و متراکم انجام شد. اندازه قابل توجه محل آزمایش در Hessigheim، آلمان، از جمع آوری داده های زمینی جلوگیری می کند. همانطور که در شکل 1 قابل مشاهده است، سایت شامل مناطق ساخته شده، مناطق استفاده کشاورزی و یک قفل کشتی به عنوان ساختار مورد علاقه خاص است.
شکل 1: منطقه آزمایش در رودخانه Neckar در Hessigheim، آلمان.
برای نظارت سنتی، شبکه ای از چندین ستون در مجاورت قفل ایجاد شد. همانطور که در شکل 2 نشان داده شده است، اهداف فتوگرامتری به ستون ها علامت می دهند تا آنها را به عنوان نقاط کنترل و کنترل برای ارجاع جغرافیایی در دسترس قرار دهند. برای جمع آوری داده های پهپاد، یک هشت کوپتر RIEGL RiCopter مجهز به سنسور RIEGL VUX-1LR Lidar و دو دوربین سونی آلفا 6000 مایل استفاده شد. با ارتفاع اسمی پرواز 50 متر از سطح زمین، فاصله نوار 35 متر و میدان دید اسکنر (FoV) 70 درجه، سیستم 300-400 نقطه بر متر مربع در هر نوار و 800 نقطه در متر مربع برای کل بلوک پرواز را ثبت کرد.
به دلیل همپوشانی طرف اسمی 50٪. پارامترهای ماموریت پرواز منجر به قطر ردپای لیزری روی زمین کمتر از 3 سانتیمتر با فاصله نقطهای 5 سانتیمتر شد. دامنه نویز اسکنر 5 میلی متر است. مسیر پلت فرم توسط یک سیستم GNSS/IMU پهپاد APX-20 اندازه گیری شد تا امکان ارجاع جغرافیایی مستقیم فراهم شود. دو دوربین سونی آلفا 6000 مایل که بر روی پلتفرم RiCopter نصب شدهاند، هر کدام فو وی 74 درجه دارند. آنها با زاویه دید 35± درجه به طرفین، تصاویر را در فاصله نمونه برداری از زمین (GSD) 1.5-3 سانتی متر با هر کدام 24 مگاپیکسل ثبت کردند.
شکل 2: هدف فتوگرامتری روی ستون.
تنظیم نوار لیدار و مثلث بندی خودکار هوایی
پس از ارجاع جغرافیایی مستقیم، یک گردش کار معمولی Lidar شامل تنظیم نوار برای به حداقل رساندن تفاوت بین نوارهای همپوشانی است. این مرحله با تخمین کالیبراسیون نصب اسکنر و همچنین پارامترهای تصحیح برای راه حل مسیر GNSS/IMU، ارجاع جغرافیایی را بهبود می بخشد. به طور معمول، یک افست ثابت (Δx، Δy، Δz، Δroll، Δpitch، Δyaw) برای هر نوار تخمین زده می شود. از طرف دیگر، اصلاحات وابسته به زمان برای هر یک از این شش پارامتر را می توان با splines مدل کرد.
شکل 3 به طور مثال یک صفحه کنترل زمینی لیدار را نشان می دهد که برای ارجاع جغرافیایی مطلق استفاده می شود. هر سیگنال دارای دو صفحه سقف مانند در ابعاد 40 × 80 سانتی متر با موقعیت و جهت مشخص است. ارزیابی تنظیم نوار لیدار این پروژه بهعلاوه ستونهای علامتدار نشاندادهشده در شکل 2 را اعمال میکند. این اهداف فتوگرامتری، تفاوت ارتفاعی را به ابر نقطه ژئورنفرانس شده در 33 هدف ارائه میکنند.
در بررسی ها، این تفاوت ها منجر به دقت RMS 5.2 سانتی متری شد. برای فعال کردن ارجاع جغرافیایی بلوک تصویر مورب سونی آلفا توسط مثلث هوایی خودکار (AAT)، شش هدف فتوگرامتری به عنوان نقاط کنترل زمینی (GCPs) انتخاب شدند. 27 هدف باقیمانده در نقاط بازرسی مستقل (CPs) بین 5.2 سانتی متر (حداکثر) و 1.2 سانتی متر (حداکثر) با RMS 2.5 سانتی متر تفاوت داشتند.
شکل 3: هواپیمای کنترل لیدار.
بنابراین، نه تنظیم نوار لیدار و نه تنظیم بلوک بسته، دقت نقطه شی 3 بعدی مورد نیاز را در طول ارزیابی مستقل دادههای حسگر مختلف به دست نمیآورند. با این حال، در صورتی که هر دو مرحله توسط به اصطلاح ژئورفرجنس هیبریدی ادغام شوند، دقت به طور قابل توجهی بهبود می یابد (Glira 2019).
ارجاع جغرافیایی ترکیبی لیدار و تصاویر هوایی
شکل 4 بخشی از نقاط Lidar پروژه را به تصویر می کشد که با مقدار شدت کد رنگی شده است. نقاط سفید پوشانده شده نشان دهنده نقاط پیوند از تنظیم بلوک بستهای از تصاویر سونی آلفا هستند. معمولاً، این مرحله پارامترهای دوربین مربوطه را از روی مختصات پیکسلی مربوط به تصاویر همپوشانی تخمین میزند. مختصات شی این نقاط پیوند فقط یک محصول جانبی هستند.
در مقابل، ارجاع جغرافیایی ترکیبی این مختصات نقطه اتصال را برای به حداقل رساندن تفاوت آنها با نقاط Lidar مربوطه اعمال می کند. این فرآیند اصلاحات وابسته به زمان مسیر پرواز را شبیه به تنظیم سنتی نوار لیدار تخمین می زند. در این مرحله، مختصات نقطه کراوات، محدودیتهای هندسی را از AAT اضافه میکنند. این محدودیت های قابل توجهی را از بلوک تصویر برای اصلاح هندسه اسکن Lidar فراهم می کند.
این امر به ویژه در صورتی مفید است که هر دو سنسور بر روی یک پلت فرم پرواز کنند و بنابراین مسیر یکسانی داشته باشند. ارجاع جغرافیایی ترکیبی علاوه بر این اطلاعات مربوط به نقاط کنترل زمینی مورد استفاده در هنگام تنظیم بلوک بسته را باز می کند. بنابراین، ارجاع جغرافیایی دادههای لیدار دیگر نیازی به هواپیماهای کنترلی اختصاصی لیدار ندارد. درعوض، تمام اطلاعات مربوط به نقطه چک و نقطه کنترل مورد نیاز از اهداف فتوگرامتری استاندارد موجود است که از اهمیت عملی بالایی برخوردار است.
شکل 4: نقاط لیدار رنگ شده با شدت و نقاط اتصال فتوگرامتری (سفید).
نویسندگان از یک اسپلاین انعطاف پذیر به عنوان یک مدل قدرتمند برای تصحیح مسیر استفاده کردند. این انعطاف پذیری به طور بالقوه می تواند منجر به تغییر شکل های سیستماتیک در صورت اعمال در طول تنظیم استاندارد نوار شود. در مقابل، یکپارچهسازی اطلاعات از فریمهای تصویر دوبعدی پایدار که در طول تنظیم بلوک بستهبندی جهتگیری شدهاند، به طور قابل اعتمادی از چنین اثرات منفی جلوگیری میکند.
شکل 5 نتیجه رویکرد ترکیبی از نرم افزار OPALS مورد استفاده را نشان می دهد. شش GCP که با دایرههای قرمز مشخص شدهاند و 27 هدف باقیمانده که بهعنوان CP استفاده میشوند، با AAT که قبلاً مورد بحث قرار گرفت، منطبق هستند. برای ژئو ارجاع هیبریدی، اختلاف ارتفاع – حداقل 1.5 سانتی متر، حداکثر 0.7 سانتی متر و میانگین 0.4- سانتی متر است. انحراف استاندارد مربوطه 0.6 سانتی متر به وضوح نشان می دهد که دقت زیر سانتی متر اکنون امکان پذیر است.
ابرهای نقطه ای ترکیبی از Lidar و استریو چند نمای
نقاط اتصال فتوگرامتری همانطور که در شکل 4 نشان داده شده است فقط یک محصول جانبی از تنظیم بلوک بسته نرم افزاری هستند، زیرا ابرهای نقطه سه بعدی متراکم توسط MVS در مرحله بعدی ارائه می شوند. در اصل، دقت هندسی ابرهای نقطه MVS به طور مستقیم با GSD و در نتیجه مقیاس تصاویر مربوطه مطابقت دارد. این اجازه می دهد تا داده های سه بعدی را حتی در محدوده زیر سانتی متری برای وضوح تصویر مناسب ضبط کنید. با این حال، تطبیق تصویر استریو، دید نقاط شی را در حداقل دو تصویر فرض میکند.
این می تواند یک مشکل برای ساختارهای سه بعدی بسیار پیچیده باشد. در مقابل، اصل اندازهگیری قطبی حسگرهای لیدار زمانی سودمند است که ظاهر جسم با مشاهده از موقعیتهای مختلف به سرعت تغییر کند. این امر برای اشیاء نیمه شفاف مانند پوشش گیاهی یا میله های جرثقیل (نگاه کنید به شکل 4)، برای اجسام در حال حرکت مانند وسایل نقلیه و عابران پیاده، یا در دره های بسیار باریک شهری و همچنین در محل های ساخت و ساز صادق است.
یکی دیگر از مزایای لیدار پتانسیل اندازه گیری پاسخ های متعدد سیگنال های منعکس شده است که نفوذ پوشش گیاهی را امکان پذیر می کند. از سوی دیگر، افزودن بافت تصویر به ابرهای نقطه لیدار هم برای تجسم و هم برای تفسیر سودمند است. در ترکیب با قابلیت رزولوشن بالا MVS، این از استدلال برای ادغام مناسب Lidar و MVS در طول تولید ابر نقطه سه بعدی پشتیبانی می کند.
شکل 5: اختلاف ارتفاع ابر نقطه لیدار تا اهداف علامت دار. GCP ها به صورت دایره های قرمز علامت گذاری می شوند.
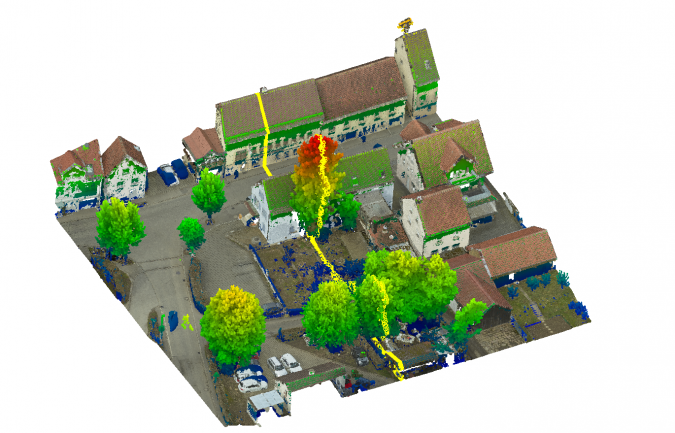
شکل 6 یک مش بافت سه بعدی را نشان می دهد که از تصاویر سونی آلفا توسط خط لوله MVS در نرم افزار SURE از nFrames ایجاد شده است. همانطور که در شکل 7 مشاهده می شود، جزئیات هندسی بسیار بیشتری در دسترس است، به عنوان مثال. در بالای کلیسا و در پوشش گیاهی پس از داده های Lidar یکپارچه شده است. شمارش چهره معمولاً با پیچیدگی هندسی سازگار است، که برای بخش کوچک برج کلیسا نیز قابل مشاهده است. به عنوان مثال، شکل 6 شامل تقریباً 325000 چهره است، در حالی که شکل 7 دارای 372000 مثلث است.
شکل 6: مش 3 بعدی بافت از MVS.
شکل 7: مش سه بعدی بافت از Lidar و MVS.
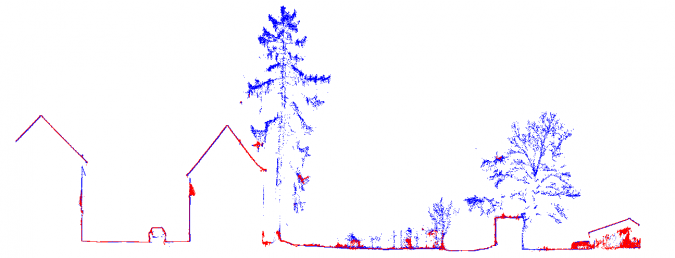
شکل 8 و 9 ویژگی های مکمل Lidar و MVS را برای نقاط سه بعدی در قسمت دیگری از محل آزمایش نشان می دهد. شکل 8 نقاط RGB رنگ تولید شده توسط MVS را نشان می دهد. داده های Lidar روی هم پوشانده شده با توجه به ارتفاع مربوطه کد رنگی می شوند. در نهایت، خط زرد نمایانگر نمایه ای است که برای استخراج نقاط نشان داده شده در شکل 9 استفاده می شود. اختلاف بین ابرهای نقطه از MVS (قرمز) و لیدار (آبی) به ویژه در درختان مشهود است، جایی که Lidar امکان تشخیص بازگشت های متعدد را در امتداد یک مسیر تک پرتو لیزری نشان می دهد.
در حالی که ابرهای نقطه ای همانطور که در شکل های 8 و 9 نشان داده شده است مجموعه ای نامرتب از نقاط هستند، مش ها همانطور که در شکل های 6 و 7 نشان داده شده اند نمودارهایی هستند که از رئوس، لبه ها و وجوه تشکیل شده اند که اطلاعات مجاورت صریح را ارائه می دهند. تفاوت اصلی بین مش ها و ابرهای نقطه ای در دسترس بودن بافت با وضوح بالا و تعداد کمتر موجودیت ها است.
این به ویژه برای تفسیر خودکار بعدی مفید است. به طور کلی، بسیاری از نقاط (Lidar) را می توان با یک چهره مرتبط کرد. نویسندگان از این رابطه چند به یک برای تقویت چهرهها با ویژگیهای متوسط Lidar که از نقاط مرتبط مربوطه مشتق شدهاند، استفاده کردند.
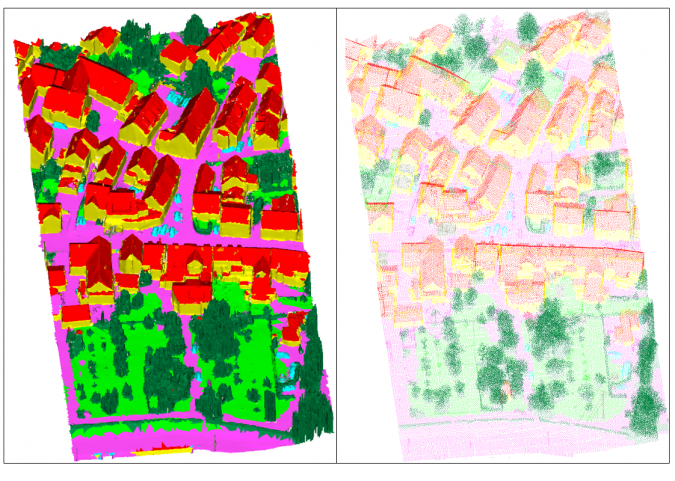
این آنها را قادر می سازد تا اطلاعات ذاتی هر دو حسگر را در نمایش مش به منظور دستیابی به بهترین تقسیم بندی معنایی ممکن یکپارچه کنند. شکل 10 مش برچسبگذاریشده را که توسط طبقهبندیکننده PointNet++ پیشبینی شده بود (سمت چپ) و برچسبهای منتقل شده به ابر نقطه متراکم Lidar (راست)، نشان میدهد که توسط فاکتور 20 برای تجسم نمونهبرداری شده است.
کد رنگ کلاس زیر استفاده می شود: نما (زرد)، سقف (قرمز)، سطح غیر قابل نفوذ (سرخابی)، فضای سبز (سبز روشن)، پوشش گیاهی متوسط و بالا (سبز تیره)، وسیله نقلیه (فیروزه ای)، دودکش/آنتن (نارنجی) ) و بهم ریختگی (خاکستری).
شکل 8: مقایسه نقاط سه بعدی از اندازه گیری MVS (RGB) و Lidar (ارتفاع کد شده). خط زرد نمایه نشان داده شده در شکل 9 را مشخص می کند.
ارسال به راحتی با استفاده مجدد از رابطه چند به یک بین نقاط لیدار و چهره ها انجام شد. بنابراین، تقسیمبندی معنایی ابر نقطه لیدار از ویژگیهایی استفاده میکند که در ابتدا فقط برای مش در دسترس بودهاند، به عنوان مثال. بافت از این رو، تقسیم بندی مش معنایی از ویژگی های ذاتی هر دو نمایش استفاده می کند، که یکی دیگر از مزایای تصویر مشترک و پردازش Lidar است.
شکل 9. نمایه استخراج شده با نقاط سه بعدی از Lidar (آبی) و MVS (قرمز).
شکل 10: مش برچسب گذاری شده (سمت چپ) و برچسب ها به ابر نقطه متراکم Lidar (راست) منتقل شده اند.
نتیجه
این مقاله یک گردش کار برای ارجاع جغرافیایی هیبریدی، بهبود و طبقه بندی پهپاد با وضوح فوق العاده بالا Lidar و ابرهای نقطه تصویر ارائه می دهد. در مقایسه با یک ارزیابی جداگانه، جهت گیری ترکیبی دقت را از 5 سانتی متر به کمتر از 1 سانتی متر بهبود می بخشد.
علاوه بر این، هواپیماهای کنترلی لیدار منسوخ می شوند، بنابراین تلاش برای ارائه اطلاعات کنترلی در زمین به طور قابل توجهی کاهش می یابد. نویسندگان انتظار دارند با جایگزین کردن دوربینهای فعلی نصب شده بر روی RIEGL RiCopter با یک سیستم فاز یک iXM با کیفیت بالا، بهبود بیشتری حاصل شود تا تصاویر رادیومتری بهتر با وضوح بالاتر به دست آید. این امر بیشتر از تولید و تجزیه و تحلیل ابرهای نقطهای با کیفیت بالا پشتیبانی میکند و بنابراین امکان ضبط دادههای مبتنی بر پهپاد را برای برنامههای بسیار چالش برانگیز فراهم میکند.
سپاسگزاریها
بخش هایی از تحقیقات ارائه شده در قالب پروژه ای که توسط موسسه فدرال هیدرولوژی آلمان (BfG) در کوبلنتس اعطا شده بود، تامین شد. از Gottfried Mandlburger، Wilfried Karel (TU Wien) و Philipp Glira (AIT) برای پشتیبانی و انطباق آنها با نرم افزار OPALS در طول ارجاع جغرافیایی ترکیبی تشکر می کنیم. پشتیبانی Tobias Hauck از nFrames در طول کار مشترک با SURE نیز تایید شده است.
در Intergeo، Emesent سه محصول جدید را راهاندازی کرد که به متخصصان زمینفضایی در صرفهجویی در زمان کمک میکند و در عین حال دادههای دقیق را برای دوقلوهای دیجیتال و برنامههای BIM ضبط میکند. Emesent یک شرکت پیشگام در زمینه استقلال هواپیماهای بدون سرنشین، نقشه برداری Lidar و تجزیه و تحلیل داده ها است.
این محصولات عبارتند از Hovermap ST-X، نوع جدید Hovermap با دقت بهبود یافته و برد حسگر 300 متر، یک افزودنی رادیویی دوربرد که دامنه ارتباط با Hovermap را تا 20 برابر افزایش می دهد، و پلت فرم Aura Emesent که ارائه می دهد. پردازش یکپارچه SLAM و محیط تجسم ابر نقطه ای برای کاربران Hovermap. دکتر استفان هرابار، مدیر عامل شرکت، گفت: «ما از راهاندازی این محصولات هیجانزده هستیم که در کنار هم به مشتریانمان اجازه میدهند تا دادههای سه بعدی متراکم و دقیق را در مناطق بزرگ و پیچیده در زمان کمتری ثبت کنند و نتایج را با جزئیات عالی ببینند تا بینشهای جدیدی به دست آورند.» و یکی از بنیانگذاران Emesent.
گسترش دامنه اسکن خودکار لیدار
Hovermap ST-X جدیدترین نسخه برنده جایزه Hovermap خودمختاری و دستگاه نقشه برداری Emesent است. جدیدترین فناوری سنجش لیدار را برای ارائه ابرهای نقطه ای با چگالی بالا با افزایش پوشش و دقت بهبود یافته ترکیب می کند. این دستگاه دارای برد سنجش 300 متر، بازگشت های سه گانه و بیش از یک میلیون نقطه در ثانیه است، داده های دقیق و دقیق را در یک منطقه بزرگتر در زمان کمتری ثبت می کند. مشتریانی که مناطق وسیعی را برای استخراج معدن، ساخت و ساز و جنگلداری اسکن میکنند، از این ویژگیها بهره خواهند برد و زمان سریعتری برای بینش فراهم میکنند.
دقت حسگر لیدار بهبود یافته، الگوریتم Wildcat SLAM برنده جایزه و نقاط کنترل زمینی خودکار اختیاری نتایجی را با دقت زیر سانتی متر ارائه می دهند. دقت و تراکم افزایش یافته همچنین به اسکن های داخلی ساختمان ها، کارخانه های صنعتی و سایر دارایی ها برای پلان های طبقه و برنامه های اسکن به BIM کمک می کند.
همانند نسخههای قبلی، Hovermap ST-X استقلال پیشرفته پهپاد نقشه برداری را برای اسکن مناطق غیرقابل دسترس از GPS فراهم میکند یا میتواند برای اسکنهای دستی، کولهپشتی یا روی وسیله نقلیه استفاده شود. طراحی دارای استاندارد IP65 که در شرایط آب و هوایی مهر و موم شده است، امکان استفاده در شرایط مرطوب یا گرد و غبار را نیز فراهم می کند. آندره برودریک، معاون محصول در Emesent گفت: «Hovermap ST-X مطمئناً یک ابزار ارزشمند برای متخصصان بازرسی زمین و دارایی و نقشه برداری خواهد بود. این یک راه حل اسکن همه کاره برای عکسبرداری از مناطق بزرگ در فضای باز یا فضاهای پیچیده داخلی در اختیار آنها قرار می دهد.
بازرسی و نقشه برداری سریع
لوازم جانبی رادیویی دوربرد Emesent به Hovermap متصل میشود تا دامنه اتصال را تا 20 برابر افزایش دهد (تا یک کیلومتر برای برنامههای پروازی از سطح زمین). Broodryk اضافه کرد: «رادیو برد بلند ما به اپراتورها اجازه میدهد تا از مزایای کامل قابلیتهای خودکار و نقشه برداری Hovermap ST-X بهره ببرند و دامنه کاربردهای آن را گسترش دهند.
“همچنین با Hovermap ST سازگار است، بنابراین مشتریان فعلی نیز از آن سود خواهند برد.” رادیو برد بلند با قابلیت اسکن محیط های بزرگ و پیچیده در یک پرواز و در عین حال حفظ پیوند ارتباطی برای به روز رسانی نقاط بین راه و پیش نمایش پوشش ابر نقطه در طول پرواز، در زمان اپراتورها در میدان صرفه جویی می کند. این نیاز به اسکن از چندین مکان یا ادغام مجموعه داده ها در پس پردازش را از بین می برد.
ساده کردن گردش کار اسکن لیزری سه بعدی
Aura، پلتفرم پردازش، تجسم و تجزیه و تحلیل یکپارچه Emesent، یک گردش کار ساده را برای کاربران Hovermap فراهم میکند تا دادههای خود را پردازش کنند، نتایج را مشاهده کنند، مجموعه دادهها را تمیز کنند و اندازهگیریهایی را برای استخراج بینش و تصمیمگیری انجام دهند. موتور تجسم آئورا برای ابرهای نقطه ای متراکم و دقیق تولید شده توسط Hovermap ST و ST-X بهینه شده است.
کاربران میتوانند ابرهای نقطهای با بیش از یک میلیارد نقطه را با وضوح کامل مشاهده کنند تا اطمینان حاصل کنند که جزئیات و بینشهای مهم از دست نمیروند. Broodryk اظهار داشت: “Aura راه حلی ارائه می دهد که گردش کار کاربر را بدون درز و بدون دردسر، مهم نیست که مجموعه داده ها چقدر بزرگ یا متعدد، ابرهای نقطه ای متراکم یا ساختارهای سه بعدی پیچیده هستند.” “Aura همچنین پایه و اساس ماژول های تحلیل ابری نقطه ای آینده را که در حال توسعه آن هستیم، ایجاد می کند.”
Hovermap ST-X استقلال پیشرفته پهپاد را برای اسکن مناطق غیرقابل دسترس از GPS فراهم می کند یا می تواند برای اسکن های دستی، کوله پشتی یا روی وسیله نقلیه استفاده شود. (با احترام: Emesent)
Topodrone، طراح و سازنده تجهیزات Lidar با دقت بالا برای نصب بر روی هواپیماهای بدون سرنشین، وسایل نقلیه و کوله پشتی، مستقر در سوئیس، یک راه حل مبتنی بر پهپاد Aquamapper را برای نقشه برداری عمق سنجی و ساخت و ساز دریایی راه اندازی کرده است. دستگاه جدید جمعآوری دادههای چندوظیفهای و تجهیزات Topodrone Lidar Ultra با موفقیت برای نقشهبرداری هوابرد در پروژه ساختوساز بزرگراه در رومانی، اتحادیه اروپا برای ارائه یک دوقلو دیجیتال کامل از یک منطقه مورد مطالعه استفاده شدهاند.
Aquamapper یک سخت افزار کاملاً جدید است که در داخل توسط Topodrone توسعه یافته و به مجموعه کاملی از راه حل های نقشه برداری فتوگرامتری، Lidar و عمق سنجی کمک می کند. این محصول جدید که بر روی یک پهپاد نصب شده است ترکیبی از راندمان سرعت بالا (تا 14 کیلومتر در ساعت) و دقت را ارائه می دهد. این یک راه حل آماده PPK است که با پهپاد DJI Matrice 300 RTK سازگار است. حوزه های کاربردی شامل بررسی های حمام سنجی دریای آزاد تا عمق 100 متری، بررسی های کمیت و محاسبه رسوبات و بررسی های نگهداری دوره ای استخرهای ذخیره سازی است.
نقشه برداری بستر رودخانه Bathymetric مبتنی بر پهپاد
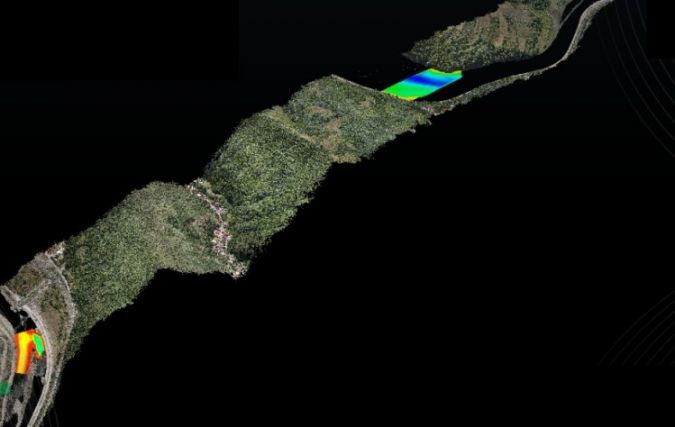
Topodrone Aquamapper و Lidar Ultra برای نقشه برداری هوابرد در Autostrada Sibiu – Pitești، Secțiunea 2: Boița – Cornetu، یک پروژه راه سازی اروپایی استفاده شده اند. بزرگراهی در یکی از سخت ترین زمین های رومانی ساخته می شود و شامل هفت تونل، 24 پل و 18 راهرو است. کریدور پهپاد لیدار و بررسی عمق سنجی توسط شرکت رومانیایی Graphein Topo SA برای ارائه نقشه های دقیق و اطلاعات به روز در مورد سطح زمین، ساختمان ها، جاده ها، شبکه های خطوط برق، مرزهای کاداستر و غیره و همچنین رودخانه ها انجام شد.
Topodrone Lidar Ultra در پهپاد DJI M300 برای گرفتن داده های اسکن لیزری از ارتفاع 100 تا 120 متری بر فراز زمین های ناهموار جنگلی برای پوشش دهی یک راهرو به طول 32 کیلومتر و عرض 400 متر در 14 پرواز استفاده شد، در حالی که Aquamapper به همان DJI M30 برای بررسی عمق سنجی بر روی شش تقاطع رودخانه متصل شد.
مزیت کلیدی تجهیزات حمام سنجی جدید Topodrone توانایی تصویربرداری از بستر رودخانه با دقت سطح سانتی متری با سرعت بالا در حالت تمام اتوماتیک و بدون قایق است. بنابراین به ما این امکان را می دهد که در مناطق صعب العبور و کم آب کار کنیم. علاوه بر این، همان پهپاد حامل را می توان هم برای بررسی لیدار و هم برای بررسی عمق سنجی استفاده کرد. ترکیبی از یک پژواک، GNSS و سیستم اندازه گیری اینرسی به دستیابی به نتایج دقیق پس از پردازش کمک می کند.
مزیت کلیدی تجهیزات حمام سنجی جدید Topodrone توانایی گرفتن بستر رودخانه است.
سایر خبرهای مرتبط:
سایت Geonline، سایتی مرجع برای مرتفع نمودن نیاز علاقمندان، پژوهشگران، دانشجویان و دانش آموزان در حوزه جغرافیا است که برای تمامی سنین و سطوح مطالب کاربردی دارد.