نویسنده: Gert Riemersma
باستان شناسان ده ها سال است که روی Sand Canyon Pueblo در کلرادو، ایالات متحده آمریکا مطالعه می کنند. امروزه نقشه برداری و تجسم سنتی پر زحمت دیگر برای مطالعات دقیق کافی نیست. بررسی ترکیبی از یک سیستم هوایی بدون سرنشین (UAS) با لیدار نشان داده است که چگونه ابرهای نقطه ای دقیق و متراکم امکان کشف سازه هایی که قبلاً مستند نشده بودند را میسر می سازد. با این حال، همانطور که نویسنده به طور قانع کننده ای نشان می دهد، انجام یک نظرسنجی UAS Lidar نیازمند دانش و مهارت های کامل است.
دره های یادبود ملی باستانی در کلرادو، ایالات متحده، یک چشم انداز باستان شناسی مهم است که حاوی منابع تاریخی و زیست محیطی فراوانی است. این منطقه اکنون یک نقطه تفریحی است، اما در حدود سال 1240 پس از میلاد این منطقه توسط جامعه پوئبلو اشغال شد، که بیش از 70 روستا را ساخت که حدود 30000 نفر در آن ساکن بودند. تنها در سند کانیون، بیش از 90 سازه زیرزمینی معروف به “کیوا” توسط خانواده ها به عنوان سکونت مورد استفاده قرار گرفت.
بین سال های 1984 و 1995، سایت مورد مطالعه، نقشه برداری و کاوش با استفاده از تکنیک های سنتی بررسی قرار گرفت. Routescene Inc. برای نقشهبرداری دقیقتر از این سایت غنی از نظر فرهنگی، که توسط دفتر مدیریت زمین مدیریت میشود، با مشارکت Caddis Aerial برای ایجاد یک مدل زمین دیجیتال زمین برهنه دقیق (DTM) همکاری کرد. این رویکرد بر اساس یک سیستم Lidar – که می تواند در پوشش گیاهی متراکم نفوذ کند و تراکم های بالا ایجاد کند – بر روی یک هواپیمای بدون سرنشین (UAV یا “پهپاد”) نصب شده بود.
پهپاد
DJI M600 Pro به دلیل پایداری و ظرفیت بالابری آن به عنوان پلتفرم انتخاب شد. این پهپاد بسته به باد و سایر شرایط آب و هوایی می تواند مدت زمان پروازی بین 15 تا 20 دقیقه داشته باشد و در یک پرواز مساحت حداقل 400×400 متر را به تصویر می کشد و کاربران را قادر می سازد تا مناطق بیش از دو کیلومتر مربع در روز را بررسی کنند. LidarPod Routescene که در سال 2013 برای استفاده در پهپادها طراحی شده است شامل مجموعه ای از حسگرها از جمله Velodyne HDL32 است.
با سرعت اسکن تا 1.4 میلیون نقطه در ثانیه از 32 لیزر مختلف که در یک میدان دید 40 درجه زاویه دارند، این امکان نفوذ بالای پوشش گیاهی را فراهم می کند. مودم رادیویی داخلی نه تنها فرمان و کنترل را قادر میسازد، بلکه و مهمتر از آن، عملیات – کامل با نظارت بر تضمین کیفیت (QA) در زمان واقعی – را در فاصله بیش از 2 کیلومتر امکانپذیر میکند.

باستانی باستانی باستانی باستانی باستانی باستانی باستانی باستانی باستانی باستانی باستانی باستانی باستانی باستانی باستانی باستانی باستانی باستانی باستانی باستانی باستانی
برخاستن و بررسی
نقطه برخاستن در جاده خاکی اصلی در شمال منطقه امکان دید کافی را تا لبه های بیرونی منطقه فراهم می کند (شکل 1). این پهپاد در ارتفاع 40 متری نسبت به نقطه برخاستن پرواز کرد. ارتفاع در مرزهای غربی و شرقی به دلیل موج دار بودن زمین 20 متر و در جنوب به دلیل صخره های شیب دار 60 متر بود. برای دستیابی به تراکم نقطه DTM بسیار بالا، پهپاد با سرعت 5 متر بر ثانیه به پایین ترین حد ممکن پرواز کرد.
تنظیم همپوشانی بین خطوط پرواز مجاور روی 100٪ به این معنی است که هر قطعه زمین دو بار بررسی شده است، که منجر به تراکم نقطه بالاتر و برخورد نقاط لیزر بیشتری به زمین می شود. طرح پرواز از برنامه GS Pro DJI در پهپاد آپلود شد.
M600 Pro به صورت دستی برای شروع ماموریت پرواز کرد و برنامه پرواز از داخل برنامه GS Pro اجرا شد. برای اهداف ژئوارفرانس دقیق، هشت نقطه کنترل زمینی (GCPs) با GNSS اندازهگیری شد و اهداف لیدار با قطر 60 سانتیمتر که بر روی سهپایهها نصب شده بودند، روی آنها قرار گرفتند (شکل 2).
به لطف مواد بسیار بازتابنده آنها، اهداف به راحتی در ابر نقطه قابل شناسایی بودند. پس از هر ماموریت، داده ها از LidarPod دانلود شده و با استفاده از LidarViewer Pro بازرسی می شوند. این نرمافزار اختصاصی کاربر را قادر میسازد تا با استفاده از Filter Development Toolkit برای توسعه و اعمال فیلترها، یک گردش کار پردازش Lidar ایجاد کند.

شرایط پرواز
این بررسی در اکتبر 2018 انجام شد. دما در اوایل صبح بین 15 تا 20 درجه سانتیگراد بود که در طلوع خورشید 5 درجه افزایش یافت. برنامه ریزی ماموریت پهپاد باید ارتفاع 2100 متری را در نظر می گرفت زیرا با افزایش ارتفاع پرواز و همچنین به دلیل شرایط جوی مانند دما و رطوبت، عملکرد هواپیما کاهش می یابد. ارتفاع پرواز و شرایط جوی در ارتفاع به اصطلاح چگالی ترکیب می شوند.
هوای سرد صبحگاهی منجر به تراکم ارتفاع 2750 تا 3050 متر شد. علاوه بر ارتفاع تراکم، چالش های دیگر شامل خلبانی یک هواپیمای تازه خریداری شده و محموله بود. 40 درصد از ظرفیت باتری پس از تکمیل خط پرواز فعلی باقی ماند و پهپاد پس از آن به محل برخاستن پرواز کرد و معمولاً با 30 درصد ظرفیت فرود آمد. این حاشیه ایمنی سخاوتمندانه به عنوان یک رویکرد معقول در نظر گرفته شد. وزش باد در اواسط صبح تمایل داشت که شرایط پرواز را چالش برانگیزتر کند. با این حال، چهار پرواز با موفقیت انجام شد و آخرین خط پرواز درست قبل از تقویت بیشتر باد و فراتر از محدودیت های عملیاتی به پایان رسید.
تله
از آنجایی که همیشه این احتمال وجود دارد که دادههای اضافی در تاریخ بعدی – چه برنامهریزیشده یا برنامهریزی نشده – جمعآوری شوند، پیشبینی این امر با علامتگذاری همه GCPها با استفاده از یک میخ دائمی که به زمین میخورد، یک روش استاندارد است. بررسی مجدد در اواسط زمستان انجام شد، زمانی که GCPs زیر 30 سانتی متر از پوشش برف مدفون شدند. تجزیه و تحلیل داده ها اختلافی را در موقعیت GCP ها نسبت به ابر نقطه نشان داد.
تجزیه و تحلیل بیشتر بیشتر نشان داد که خطاها به دلیل ذخیره مختصات GCP در مایکروسافت اکسل ایجاد شده است که همه اعداد را تا شش رقم اعشار گرد می کند. برای مختصات جغرافیایی این یک عدم دقت تا 4 متر معرفی کرد. بنابراین یک کلمه احتیاط: مراقب نحوه جمع آوری و ذخیره داده های نظرسنجی باشید! بارگذاری مجدد داده های خام اصلی در قالب دیگری مشکل را حل کرد، اما نقشه برداران زمین نسبتاً ناراضی بودند. درسی که گرفت!
نتایج
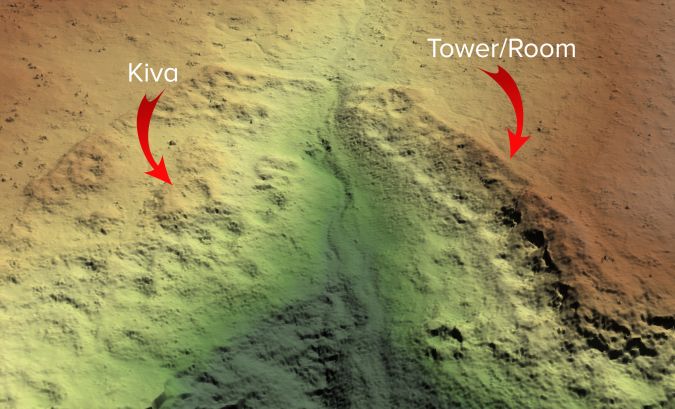
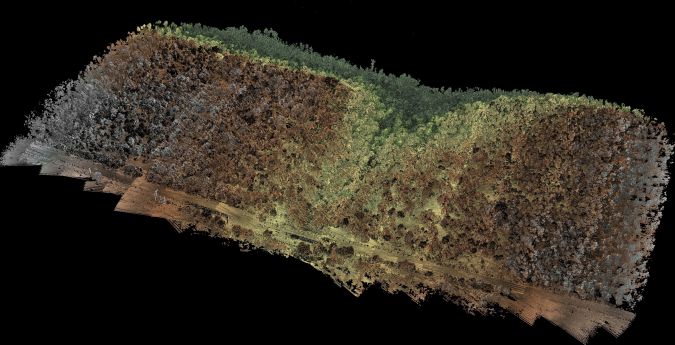
بیش از 3.2 میلیارد امتیاز جمع آوری و پردازش شد (شکل 3). فیلترهای مورد استفاده در یک توالی خودکار عبارتند از کاهش بخش، کاهش شناسه لیزری، تبدیل مختصات، ایجاد شبکه، “ابزار زمین برهنه” ساخته شده، یک شبکه اسکیم و در نهایت فیلتر صادرات LAS. این فرآیند عملاً تمام پوشش گیاهی را از ابر نقطه حذف کرد تا ساختارهایی را که باستان شناسان به آن علاقه مند بودند به تفصیل در معرض دید قرار دهد. کیواهای بدون سند و سازه های دیگر (شکل 4). این نتایج، که بدون بررسی های زمینی پر زحمت به دست آمدند، دقیق هستند و به باستان شناسان اجازه می دهند تا کارهای آینده خود را بر روی سازه های تازه یافته متمرکز کنند.