نقشه ها یکی از جادویی ترین اختراعات تاریخ بشر هستند. نقشه بابلی جهان، یا Imago Mundi – لوحی گلی که نشان می دهد یک صفحه برچسب از آنچه در آن زمان تصور می شد کل جهان است – در قرن ششم قبل از میلاد ساخته شده است. همچنین شواهدی وجود دارد که نشان میدهد بیش از 5000 سال پیش نقشههایی بر روی دیوارههای غار حک شدهاند.
نقشه ها محصول و بازتاب زمان خود هستند. نقشه 100 سال پیش به دلیل پیشرفت های اجتماعی، اقتصادی و تکنولوژیکی با نقشه ای که امروز ایجاد می شود، تفاوت اساسی دارد. به لطف پیشرفت های فناوری، نقشه های ساخته شده 100 سال آینده، از بسیاری جهات، پیچیده تر از نقشه هایی هستند که در حال حاضر تولید می شوند.
گفته می شود نقشه جهان بابلی در قرن ششم قبل از میلاد ساخته شده است.
پتانسیل برای نقشه برداری – و اینکه یک نقشه می تواند باشد – بسیار زیاد است. اما با این پتانسیل مسئولیت بزرگی به همراه دارد.
چگونه زمان نقشه ها را تغییر می دهد
تبدیل نقشه چیست؟ نقش تغییر یافته زمان ممکن است یکی از عمیق ترین عوامل باشد. مکاشفه قرن بیستم آلبرت انیشتین مبنی بر اینکه زمان از فضا جدا نیست در نقشه های قرن بیست و یکم نوشته شده است. اکنون نقشههای تایم لپس به مردم اجازه میدهند تا در طول روزها، هفتهها و سالها کامل بچرخند و لحظاتی را در زمان مشخص به مکان خاصی مشخص کنند.
تغییر از تولید نقشههای ایستا از مکانهای ثابت به ایجاد راهنماییهای مکانی مبتنی بر زمان، به توسعه فناوری دیگری مربوط میشود که زمان و مکان را در دنیای فیزیکی، اجتماعی و سایبری ادغام میکند – به ویژه آنچه که به عنوان متاوره قرار میگیرد. در آینده، نقشهها ممکن است فید مستمری از ویدیوهای مبتنی بر مکان باشند که به صورت سهبعدی حفظ میشوند – و با لایههای معنایی که مکان را نشان میدهند، داستان میگویند و به شبکههای اجتماعی متصل میشوند، پوشانده میشوند تا یک واقعیت افزوده ایجاد کنند.
لایههایی که بخشی از جعبه ابزار نقشهنگار دیجیتالی هستند نیز تغییراتی را در درک مقیاس و زمان در افراد ایجاد کردهاند. به عنوان مثال، هنگام کار با لایه ها در GIS، می توان همزمانی را در مقیاس ها و سطوح مختلف جزئیات مدل کرد. مانند عروسکهای ماتریوشکا که درون یکدیگر لانه میکنند، نقشههای لایهای بینندگان را قادر میسازد تا از مقیاس کلان به مقیاس خرد با شفافیتی بروند که جهان، جهان، جامعه، جامعه و مردم را در یک سیستم فرا رشتهای در هم تنیده نشان میدهد. با در نظر گرفتن نماهای مختلف از یک نقشه، افراد می توانند وابستگی های متقابل موضوع را به گونه ای تجربه کنند که هیچ نقشه کلاسیکی نمی تواند اجازه دهد.
خود داده نیز در حال تغییر است. بینایی ماشین و فناوری دوربین تعبیه شده اکنون امکان تعیین مکان عکس ها را در زمان واقعی یا تقریبا واقعی فراهم می کند. بنابراین می توان عکس برج ایفل را به طور خودکار به مکان دقیق آن در پاریس، فرانسه مشخص کرد. علاوه بر این، چیزهایی که می توان نقشه برداری کرد در حال تغییر هستند.
انبوهی از ماهواره ها به انسان اجازه می دهد تا فضای بیرونی را کاوش کند و حتی دورافتاده ترین مناطق زمین را در سطح زمین اسکن کند. اما فراتر از خیابانها و حتی کف اقیانوس، چه چیزی ممکن است پیش بیاید؟ شاید این نظارت بر فعالیت های انسانی به صورت دسته جمعی باشد – حرکات افراد و تعاملات شخصی دقیقه به دقیقه جمع آوری شود. به عنوان مثال، این به بینندگان نقشه حس باورنکردنی از نبض یک شهر یا شهر می دهد.
به نظر می رسد که هر اینچ از جهان نقشه برداری شده است. در واقع، حتی DNA برای ایجاد ژنوم انسان نقشه برداری شده است. پس بعدی چیه؟ شاید حدود 100 میلیارد نورون – به اضافه تریلیون ها اتصال به نام سیناپس – که مغز را می سازند، آن شبکه پیچیده ترین شبکه را ترسیم کند. این بیومتریک ها – معیارهای مشخصه های فیزیکی و ویژگی های رفتاری متمایز – هر موجودی را منحصر به فرد می کند. ترسیم این متافیزیک می تواند چیزهای زیادی را در مورد انسان آشکار کند.
نقشه های آینده
یکی از دلایل ایجاد چنین نقشه های دانه ای از انسان این است که امکان پذیر است. دلیل دیگر، قابل بحث تر، این است که نشان می دهد انسان ها چه کسانی هستند، از کجا آمده ایم و چه اتفاقی ممکن است برای ما بیفتد.
طی 200 یا 300 سال، نقشهها احتمالاً ضبط ویدیویی از هر مرحلهای خواهند بود که تاکنون توسط واحدهای منفرد طی شده است و در وب اشیا و افراد نگهداری میشوند. امید به این امر این است که دانش بیشتر از فعالیت های انسانی موجب پایداری و طول عمر این گونه شود.
همراه با هوش مصنوعی جغرافیایی (GeoAI)، فنآوریهایی که افراد را قادر میسازد به معنای واقعی کلمه و از راه دور آنچه را که شخص دیگری انجام میدهد ببینند – مانند یک دوربین پوشیدنی که به دیگران اجازه میدهد تا دیدگاه یک فرد را در زمان واقعی تجربه کنند – به طور فزایندهای برای کنترل، ارائه استفاده میشوند. راحتی، و مراقبت.
کاربردهای فناوری نقشه برداری که به دنبال کنترل افراد هستند بحث برانگیزترین هستند. آنها اطلاعاتی را برای اجرای قانون (حتی پلیس پیشگیرانه)، نظارت و اهداف تحقیق ارائه می دهند. در حال حاضر، شرکت های تخصصی وجود دارند که میلیاردها تصویر منبع باز را برای ارائه تشخیص وسیله نقلیه جمع آوری می کنند. و همین فناوری می تواند برای تطبیق بیومتریک استفاده شود.
فناوری مبتنی بر نقشه که راحتی را فراهم می کند، به ویژه با اینترنت اشیا در حال گسترش است. این نوع برنامهها به افراد اجازه میدهند از طریق سرویسهای مبتنی بر مکان و اشتراکگذاری بیدرنگ داده با یکدیگر و داراییهایشان ارتباط برقرار کنند. بهعنوان مثال، به لطف فرآیندهای نوآورانه توزیع و انجام سفارشهای امروزی، مردم میتوانند مسیرهایی را که محصولات و خدمات آنها طی میکنند، تا لحظه لحظه و نقطه سیستم موقعیتیابی جهانی (GPS) از نزدیک نظارت کنند.
اپلیکیشنهایی که برای مراقبتها طراحی شدهاند، مانند نقشههای ایمنی مبتنی بر هوش مصنوعی، احتمالاً میتوانند وضعیت افراد را فقط از طریق راه رفتن یا از طریق احساسات شناسایی شده در چهرهشان تعیین کنند. به عنوان مثال، افرادی که مبتلا به زوال عقل هستند، ممکن است تحت نظر قرار گیرند تا مراقبان در صورت به خطر افتادن سلامتی یا امنیت شخصی بیمار، هشدار دریافت کنند.
در مجموع، همه اینها باعث ایجاد «überveillance» میشود، نوعی نظارت فراتر و فراتر از آن که متکی بر فناوری است که نه تنها همیشه روشن است، بلکه در واقع در انسانها تعبیه شده است. پیامدهای این آینده بالقوه نقشه برداری سزاوار توجه دقیق و راهنمایی است.
یک چارچوب ژئواخلاق
در ژوئن 2022، انجمن جغرافیدانان آمریکا (AAG)؛ مرکز مطالعات فضایی در دانشگاه کالیفرنیا، سانتا باربارا؛ و Esri برای بررسی مسائلی که هنگام تغییر به دادههای مکان محور انسانمحور به وجود میآیند، نشستی را در مورد اطلاعات مکان و منافع عمومی برگزار کردند. این منجر به انتشار گزارشی شد که چارچوبی برای چگونگی همکاری جغرافیدانان، دانشمندان GIS، دانشمندان علوم اجتماعی، دانشمندان علوم کامپیوتر، متخصصان حقوقی، کارشناسان و فعالان کارگری، قانونگذاران و اعضای عمومی برای مقابله با چالشهای پیش آمده ایجاد میکند. تکامل نقشه برداری پیشنهادات شامل موارد زیر است:
یک دستور کار تحقیقاتی ایجاد کنید که دربرگیرنده مسائل اخلاقی کلیدی، مانند مالکیت و استفاده از داده ها باشد. حریم خصوصی و ناشناس بودن؛ اعتماد و درک ریسک؛ تحلیل چند فرهنگی و چند ظرفیتی؛ به اشتراک گذاری داده و زیرساخت؛ و کدنویسی برای فراگیری.
مواد آموزشی و اهداف آموزشی را برای کسانی که اصول اخلاقی اطلاعات مکان را مطالعه می کنند، تهیه کنید.
ایجاد مسیری برای حرکت از بحث درباره اصول اخلاقی به تشکیل مقررات جهانی قابل اجرا و قابل اجرا.
افزایش گفتوگو با ذینفعان GIS غیر سنتی و غیرمستقیم و گسترش همکاری میان اعضای بخشهای دانشگاهی، دولتی و خصوصی در مورد استفاده از اطلاعات مکان در طول چرخه حیات فناوریها – به ویژه در رابطه با حریم خصوصی و سایر ابعاد مبتنی بر ارزشها.
زمانی جغرافیدانان و متخصصان زمین فضایی به نقاط، خطوط و چندضلعی ها مشغول بودند. در حالی که این لایههای بنیادی همیشه به سیستمهای اطلاعات جغرافیایی مرتبط خواهند بود، توانایی نقشهبرداری بیشتر – از فضاهای کف خانهها تا ابعاد داخلی قلب انسان – به روشهای پیشرفتهتر، نیازمند یکپارچگی است. نقشه های آینده نه تنها باید انعکاسی از وسیع ترین گستره فناوری، بلکه از سازگارترین و جدی ترین احترام به زندگی، حیثیت و حریم انسانی (و فراتر از انسان) باشد.
From the Meridian ستونی منظم از AAG است، یک انجمن علمی و آموزشی غیرانتفاعی که اعضای آن، از نزدیک به 100 کشور، در تئوری، روشها و عمل جغرافیا علایق مشترک دارند. در مورد برنامه ها و عضویت AAG اطلاعات کسب کنید.
پروژه AUAV در آلمان تنظیم بلوک بسته نرم افزاری فتوگرامتری را با ارجاع جغرافیایی مستقیم ابرهای نقطه Lidar یکپارچه کرده است تا دقت مربوطه را به میزان قابل توجهی بهبود بخشد.
سکوهای اخیر وسایل نقلیه هوایی بدون سرنشین (UAV یا “پهپاد”) به طور مشترک تصاویر و داده های Lidar را جمع آوری می کنند. ارزیابی ترکیبی آنها به طور بالقوه ابرهای نقطه سه بعدی را با دقت و وضوح چند میلی متری ایجاد می کند که تا کنون محدود به جمع آوری داده های زمینی است. این مقاله پروژه ای را تشریح می کند که تنظیم بلوک بسته نرم افزاری فتوگرامتری را با ارجاع جغرافیایی مستقیم ابرهای نقطه لیدار ادغام می کند تا دقت مربوطه را با یک مرتبه قدر بهبود بخشد. مزایای دیگر پردازش ترکیبی ناشی از افزودن اندازهگیری محدوده Lidar به تطبیق تصویر چند نمای استریو (MVS) در طول تولید ابرهای نقطه سهبعدی متراکم با دقت بالا است.
این پروژه با هدف نظارت بر منطقه فرونشست احتمالی حدود 10 میلی متر در سال توسط مجموعه ای مکرر از ابرهای نقطه سه بعدی بسیار دقیق و متراکم انجام شد. اندازه قابل توجه محل آزمایش در Hessigheim، آلمان، از جمع آوری داده های زمینی جلوگیری می کند. همانطور که در شکل 1 قابل مشاهده است، سایت شامل مناطق ساخته شده، مناطق استفاده کشاورزی و یک قفل کشتی به عنوان ساختار مورد علاقه خاص است.
شکل 1: منطقه آزمایش در رودخانه Neckar در Hessigheim، آلمان.
برای نظارت سنتی، شبکه ای از چندین ستون در مجاورت قفل ایجاد شد. همانطور که در شکل 2 نشان داده شده است، اهداف فتوگرامتری به ستون ها علامت می دهند تا آنها را به عنوان نقاط کنترل و کنترل برای ارجاع جغرافیایی در دسترس قرار دهند. برای جمع آوری داده های پهپاد، یک هشت کوپتر RIEGL RiCopter مجهز به سنسور RIEGL VUX-1LR Lidar و دو دوربین سونی آلفا 6000 مایل استفاده شد. با ارتفاع اسمی پرواز 50 متر از سطح زمین، فاصله نوار 35 متر و میدان دید اسکنر (FoV) 70 درجه، سیستم 300-400 نقطه بر متر مربع در هر نوار و 800 نقطه در متر مربع برای کل بلوک پرواز را ثبت کرد.
به دلیل همپوشانی طرف اسمی 50٪. پارامترهای ماموریت پرواز منجر به قطر ردپای لیزری روی زمین کمتر از 3 سانتیمتر با فاصله نقطهای 5 سانتیمتر شد. دامنه نویز اسکنر 5 میلی متر است. مسیر پلت فرم توسط یک سیستم GNSS/IMU پهپاد APX-20 اندازه گیری شد تا امکان ارجاع جغرافیایی مستقیم فراهم شود. دو دوربین سونی آلفا 6000 مایل که بر روی پلتفرم RiCopter نصب شدهاند، هر کدام فو وی 74 درجه دارند. آنها با زاویه دید 35± درجه به طرفین، تصاویر را در فاصله نمونه برداری از زمین (GSD) 1.5-3 سانتی متر با هر کدام 24 مگاپیکسل ثبت کردند.
شکل 2: هدف فتوگرامتری روی ستون.
تنظیم نوار لیدار و مثلث بندی خودکار هوایی
پس از ارجاع جغرافیایی مستقیم، یک گردش کار معمولی Lidar شامل تنظیم نوار برای به حداقل رساندن تفاوت بین نوارهای همپوشانی است. این مرحله با تخمین کالیبراسیون نصب اسکنر و همچنین پارامترهای تصحیح برای راه حل مسیر GNSS/IMU، ارجاع جغرافیایی را بهبود می بخشد. به طور معمول، یک افست ثابت (Δx، Δy، Δz، Δroll، Δpitch، Δyaw) برای هر نوار تخمین زده می شود. از طرف دیگر، اصلاحات وابسته به زمان برای هر یک از این شش پارامتر را می توان با splines مدل کرد.
شکل 3 به طور مثال یک صفحه کنترل زمینی لیدار را نشان می دهد که برای ارجاع جغرافیایی مطلق استفاده می شود. هر سیگنال دارای دو صفحه سقف مانند در ابعاد 40 × 80 سانتی متر با موقعیت و جهت مشخص است. ارزیابی تنظیم نوار لیدار این پروژه بهعلاوه ستونهای علامتدار نشاندادهشده در شکل 2 را اعمال میکند. این اهداف فتوگرامتری، تفاوت ارتفاعی را به ابر نقطه ژئورنفرانس شده در 33 هدف ارائه میکنند.
در بررسی ها، این تفاوت ها منجر به دقت RMS 5.2 سانتی متری شد. برای فعال کردن ارجاع جغرافیایی بلوک تصویر مورب سونی آلفا توسط مثلث هوایی خودکار (AAT)، شش هدف فتوگرامتری به عنوان نقاط کنترل زمینی (GCPs) انتخاب شدند. 27 هدف باقیمانده در نقاط بازرسی مستقل (CPs) بین 5.2 سانتی متر (حداکثر) و 1.2 سانتی متر (حداکثر) با RMS 2.5 سانتی متر تفاوت داشتند.
شکل 3: هواپیمای کنترل لیدار.
بنابراین، نه تنظیم نوار لیدار و نه تنظیم بلوک بسته، دقت نقطه شی 3 بعدی مورد نیاز را در طول ارزیابی مستقل دادههای حسگر مختلف به دست نمیآورند. با این حال، در صورتی که هر دو مرحله توسط به اصطلاح ژئورفرجنس هیبریدی ادغام شوند، دقت به طور قابل توجهی بهبود می یابد (Glira 2019).
ارجاع جغرافیایی ترکیبی لیدار و تصاویر هوایی
شکل 4 بخشی از نقاط Lidar پروژه را به تصویر می کشد که با مقدار شدت کد رنگی شده است. نقاط سفید پوشانده شده نشان دهنده نقاط پیوند از تنظیم بلوک بستهای از تصاویر سونی آلفا هستند. معمولاً، این مرحله پارامترهای دوربین مربوطه را از روی مختصات پیکسلی مربوط به تصاویر همپوشانی تخمین میزند. مختصات شی این نقاط پیوند فقط یک محصول جانبی هستند.
در مقابل، ارجاع جغرافیایی ترکیبی این مختصات نقطه اتصال را برای به حداقل رساندن تفاوت آنها با نقاط Lidar مربوطه اعمال می کند. این فرآیند اصلاحات وابسته به زمان مسیر پرواز را شبیه به تنظیم سنتی نوار لیدار تخمین می زند. در این مرحله، مختصات نقطه کراوات، محدودیتهای هندسی را از AAT اضافه میکنند. این محدودیت های قابل توجهی را از بلوک تصویر برای اصلاح هندسه اسکن Lidar فراهم می کند.
این امر به ویژه در صورتی مفید است که هر دو سنسور بر روی یک پلت فرم پرواز کنند و بنابراین مسیر یکسانی داشته باشند. ارجاع جغرافیایی ترکیبی علاوه بر این اطلاعات مربوط به نقاط کنترل زمینی مورد استفاده در هنگام تنظیم بلوک بسته را باز می کند. بنابراین، ارجاع جغرافیایی دادههای لیدار دیگر نیازی به هواپیماهای کنترلی اختصاصی لیدار ندارد. درعوض، تمام اطلاعات مربوط به نقطه چک و نقطه کنترل مورد نیاز از اهداف فتوگرامتری استاندارد موجود است که از اهمیت عملی بالایی برخوردار است.
شکل 4: نقاط لیدار رنگ شده با شدت و نقاط اتصال فتوگرامتری (سفید).
نویسندگان از یک اسپلاین انعطاف پذیر به عنوان یک مدل قدرتمند برای تصحیح مسیر استفاده کردند. این انعطاف پذیری به طور بالقوه می تواند منجر به تغییر شکل های سیستماتیک در صورت اعمال در طول تنظیم استاندارد نوار شود. در مقابل، یکپارچهسازی اطلاعات از فریمهای تصویر دوبعدی پایدار که در طول تنظیم بلوک بستهبندی جهتگیری شدهاند، به طور قابل اعتمادی از چنین اثرات منفی جلوگیری میکند.
شکل 5 نتیجه رویکرد ترکیبی از نرم افزار OPALS مورد استفاده را نشان می دهد. شش GCP که با دایرههای قرمز مشخص شدهاند و 27 هدف باقیمانده که بهعنوان CP استفاده میشوند، با AAT که قبلاً مورد بحث قرار گرفت، منطبق هستند. برای ژئو ارجاع هیبریدی، اختلاف ارتفاع – حداقل 1.5 سانتی متر، حداکثر 0.7 سانتی متر و میانگین 0.4- سانتی متر است. انحراف استاندارد مربوطه 0.6 سانتی متر به وضوح نشان می دهد که دقت زیر سانتی متر اکنون امکان پذیر است.
ابرهای نقطه ای ترکیبی از Lidar و استریو چند نمای
نقاط اتصال فتوگرامتری همانطور که در شکل 4 نشان داده شده است فقط یک محصول جانبی از تنظیم بلوک بسته نرم افزاری هستند، زیرا ابرهای نقطه سه بعدی متراکم توسط MVS در مرحله بعدی ارائه می شوند. در اصل، دقت هندسی ابرهای نقطه MVS به طور مستقیم با GSD و در نتیجه مقیاس تصاویر مربوطه مطابقت دارد. این اجازه می دهد تا داده های سه بعدی را حتی در محدوده زیر سانتی متری برای وضوح تصویر مناسب ضبط کنید. با این حال، تطبیق تصویر استریو، دید نقاط شی را در حداقل دو تصویر فرض میکند.
این می تواند یک مشکل برای ساختارهای سه بعدی بسیار پیچیده باشد. در مقابل، اصل اندازهگیری قطبی حسگرهای لیدار زمانی سودمند است که ظاهر جسم با مشاهده از موقعیتهای مختلف به سرعت تغییر کند. این امر برای اشیاء نیمه شفاف مانند پوشش گیاهی یا میله های جرثقیل (نگاه کنید به شکل 4)، برای اجسام در حال حرکت مانند وسایل نقلیه و عابران پیاده، یا در دره های بسیار باریک شهری و همچنین در محل های ساخت و ساز صادق است.
یکی دیگر از مزایای لیدار پتانسیل اندازه گیری پاسخ های متعدد سیگنال های منعکس شده است که نفوذ پوشش گیاهی را امکان پذیر می کند. از سوی دیگر، افزودن بافت تصویر به ابرهای نقطه لیدار هم برای تجسم و هم برای تفسیر سودمند است. در ترکیب با قابلیت رزولوشن بالا MVS، این از استدلال برای ادغام مناسب Lidar و MVS در طول تولید ابر نقطه سه بعدی پشتیبانی می کند.
شکل 5: اختلاف ارتفاع ابر نقطه لیدار تا اهداف علامت دار. GCP ها به صورت دایره های قرمز علامت گذاری می شوند.
شکل 6 یک مش بافت سه بعدی را نشان می دهد که از تصاویر سونی آلفا توسط خط لوله MVS در نرم افزار SURE از nFrames ایجاد شده است. همانطور که در شکل 7 مشاهده می شود، جزئیات هندسی بسیار بیشتری در دسترس است، به عنوان مثال. در بالای کلیسا و در پوشش گیاهی پس از داده های Lidar یکپارچه شده است. شمارش چهره معمولاً با پیچیدگی هندسی سازگار است، که برای بخش کوچک برج کلیسا نیز قابل مشاهده است. به عنوان مثال، شکل 6 شامل تقریباً 325000 چهره است، در حالی که شکل 7 دارای 372000 مثلث است.
شکل 6: مش 3 بعدی بافت از MVS.
شکل 7: مش سه بعدی بافت از Lidar و MVS.
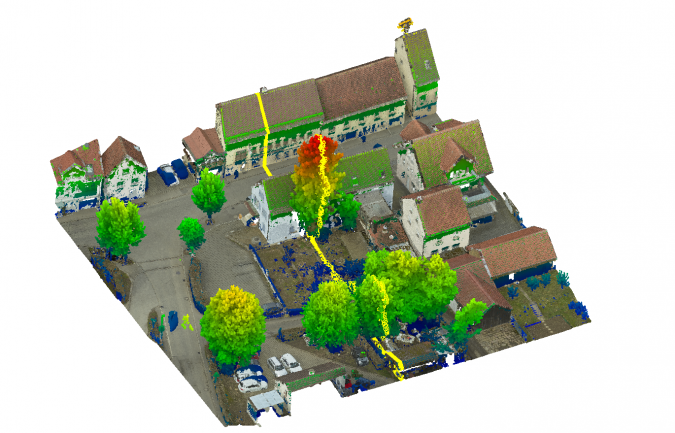
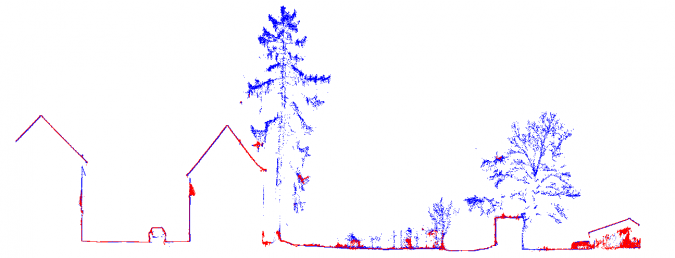
شکل 8 و 9 ویژگی های مکمل Lidar و MVS را برای نقاط سه بعدی در قسمت دیگری از محل آزمایش نشان می دهد. شکل 8 نقاط RGB رنگ تولید شده توسط MVS را نشان می دهد. داده های Lidar روی هم پوشانده شده با توجه به ارتفاع مربوطه کد رنگی می شوند. در نهایت، خط زرد نمایانگر نمایه ای است که برای استخراج نقاط نشان داده شده در شکل 9 استفاده می شود. اختلاف بین ابرهای نقطه از MVS (قرمز) و لیدار (آبی) به ویژه در درختان مشهود است، جایی که Lidar امکان تشخیص بازگشت های متعدد را در امتداد یک مسیر تک پرتو لیزری نشان می دهد.
در حالی که ابرهای نقطه ای همانطور که در شکل های 8 و 9 نشان داده شده است مجموعه ای نامرتب از نقاط هستند، مش ها همانطور که در شکل های 6 و 7 نشان داده شده اند نمودارهایی هستند که از رئوس، لبه ها و وجوه تشکیل شده اند که اطلاعات مجاورت صریح را ارائه می دهند. تفاوت اصلی بین مش ها و ابرهای نقطه ای در دسترس بودن بافت با وضوح بالا و تعداد کمتر موجودیت ها است.
این به ویژه برای تفسیر خودکار بعدی مفید است. به طور کلی، بسیاری از نقاط (Lidar) را می توان با یک چهره مرتبط کرد. نویسندگان از این رابطه چند به یک برای تقویت چهرهها با ویژگیهای متوسط Lidar که از نقاط مرتبط مربوطه مشتق شدهاند، استفاده کردند.
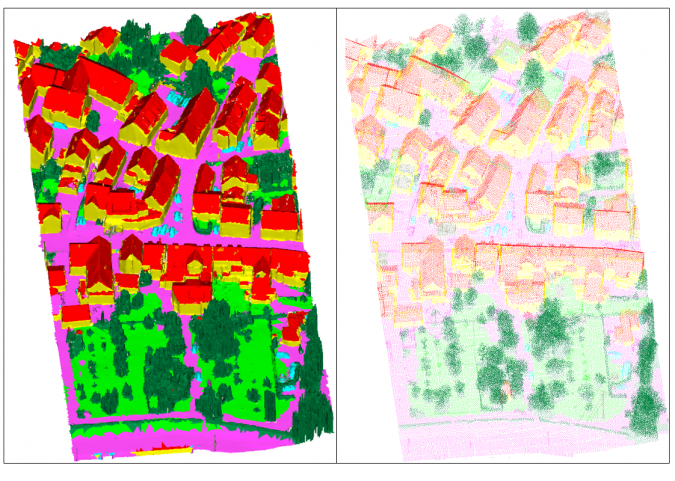
این آنها را قادر می سازد تا اطلاعات ذاتی هر دو حسگر را در نمایش مش به منظور دستیابی به بهترین تقسیم بندی معنایی ممکن یکپارچه کنند. شکل 10 مش برچسبگذاریشده را که توسط طبقهبندیکننده PointNet++ پیشبینی شده بود (سمت چپ) و برچسبهای منتقل شده به ابر نقطه متراکم Lidar (راست)، نشان میدهد که توسط فاکتور 20 برای تجسم نمونهبرداری شده است.
کد رنگ کلاس زیر استفاده می شود: نما (زرد)، سقف (قرمز)، سطح غیر قابل نفوذ (سرخابی)، فضای سبز (سبز روشن)، پوشش گیاهی متوسط و بالا (سبز تیره)، وسیله نقلیه (فیروزه ای)، دودکش/آنتن (نارنجی) ) و بهم ریختگی (خاکستری).
شکل 8: مقایسه نقاط سه بعدی از اندازه گیری MVS (RGB) و Lidar (ارتفاع کد شده). خط زرد نمایه نشان داده شده در شکل 9 را مشخص می کند.
ارسال به راحتی با استفاده مجدد از رابطه چند به یک بین نقاط لیدار و چهره ها انجام شد. بنابراین، تقسیمبندی معنایی ابر نقطه لیدار از ویژگیهایی استفاده میکند که در ابتدا فقط برای مش در دسترس بودهاند، به عنوان مثال. بافت از این رو، تقسیم بندی مش معنایی از ویژگی های ذاتی هر دو نمایش استفاده می کند، که یکی دیگر از مزایای تصویر مشترک و پردازش Lidar است.
شکل 9. نمایه استخراج شده با نقاط سه بعدی از Lidar (آبی) و MVS (قرمز).
شکل 10: مش برچسب گذاری شده (سمت چپ) و برچسب ها به ابر نقطه متراکم Lidar (راست) منتقل شده اند.
نتیجه
این مقاله یک گردش کار برای ارجاع جغرافیایی هیبریدی، بهبود و طبقه بندی پهپاد با وضوح فوق العاده بالا Lidar و ابرهای نقطه تصویر ارائه می دهد. در مقایسه با یک ارزیابی جداگانه، جهت گیری ترکیبی دقت را از 5 سانتی متر به کمتر از 1 سانتی متر بهبود می بخشد.
علاوه بر این، هواپیماهای کنترلی لیدار منسوخ می شوند، بنابراین تلاش برای ارائه اطلاعات کنترلی در زمین به طور قابل توجهی کاهش می یابد. نویسندگان انتظار دارند با جایگزین کردن دوربینهای فعلی نصب شده بر روی RIEGL RiCopter با یک سیستم فاز یک iXM با کیفیت بالا، بهبود بیشتری حاصل شود تا تصاویر رادیومتری بهتر با وضوح بالاتر به دست آید. این امر بیشتر از تولید و تجزیه و تحلیل ابرهای نقطهای با کیفیت بالا پشتیبانی میکند و بنابراین امکان ضبط دادههای مبتنی بر پهپاد را برای برنامههای بسیار چالش برانگیز فراهم میکند.
سپاسگزاریها
بخش هایی از تحقیقات ارائه شده در قالب پروژه ای که توسط موسسه فدرال هیدرولوژی آلمان (BfG) در کوبلنتس اعطا شده بود، تامین شد. از Gottfried Mandlburger، Wilfried Karel (TU Wien) و Philipp Glira (AIT) برای پشتیبانی و انطباق آنها با نرم افزار OPALS در طول ارجاع جغرافیایی ترکیبی تشکر می کنیم. پشتیبانی Tobias Hauck از nFrames در طول کار مشترک با SURE نیز تایید شده است.
در Intergeo، Emesent سه محصول جدید را راهاندازی کرد که به متخصصان زمینفضایی در صرفهجویی در زمان کمک میکند و در عین حال دادههای دقیق را برای دوقلوهای دیجیتال و برنامههای BIM ضبط میکند. Emesent یک شرکت پیشگام در زمینه استقلال هواپیماهای بدون سرنشین، نقشه برداری Lidar و تجزیه و تحلیل داده ها است.
این محصولات عبارتند از Hovermap ST-X، نوع جدید Hovermap با دقت بهبود یافته و برد حسگر 300 متر، یک افزودنی رادیویی دوربرد که دامنه ارتباط با Hovermap را تا 20 برابر افزایش می دهد، و پلت فرم Aura Emesent که ارائه می دهد. پردازش یکپارچه SLAM و محیط تجسم ابر نقطه ای برای کاربران Hovermap. دکتر استفان هرابار، مدیر عامل شرکت، گفت: «ما از راهاندازی این محصولات هیجانزده هستیم که در کنار هم به مشتریانمان اجازه میدهند تا دادههای سه بعدی متراکم و دقیق را در مناطق بزرگ و پیچیده در زمان کمتری ثبت کنند و نتایج را با جزئیات عالی ببینند تا بینشهای جدیدی به دست آورند.» و یکی از بنیانگذاران Emesent.
گسترش دامنه اسکن خودکار لیدار
Hovermap ST-X جدیدترین نسخه برنده جایزه Hovermap خودمختاری و دستگاه نقشه برداری Emesent است. جدیدترین فناوری سنجش لیدار را برای ارائه ابرهای نقطه ای با چگالی بالا با افزایش پوشش و دقت بهبود یافته ترکیب می کند. این دستگاه دارای برد سنجش 300 متر، بازگشت های سه گانه و بیش از یک میلیون نقطه در ثانیه است، داده های دقیق و دقیق را در یک منطقه بزرگتر در زمان کمتری ثبت می کند. مشتریانی که مناطق وسیعی را برای استخراج معدن، ساخت و ساز و جنگلداری اسکن میکنند، از این ویژگیها بهره خواهند برد و زمان سریعتری برای بینش فراهم میکنند.
دقت حسگر لیدار بهبود یافته، الگوریتم Wildcat SLAM برنده جایزه و نقاط کنترل زمینی خودکار اختیاری نتایجی را با دقت زیر سانتی متر ارائه می دهند. دقت و تراکم افزایش یافته همچنین به اسکن های داخلی ساختمان ها، کارخانه های صنعتی و سایر دارایی ها برای پلان های طبقه و برنامه های اسکن به BIM کمک می کند.
همانند نسخههای قبلی، Hovermap ST-X استقلال پیشرفته پهپاد نقشه برداری را برای اسکن مناطق غیرقابل دسترس از GPS فراهم میکند یا میتواند برای اسکنهای دستی، کولهپشتی یا روی وسیله نقلیه استفاده شود. طراحی دارای استاندارد IP65 که در شرایط آب و هوایی مهر و موم شده است، امکان استفاده در شرایط مرطوب یا گرد و غبار را نیز فراهم می کند. آندره برودریک، معاون محصول در Emesent گفت: «Hovermap ST-X مطمئناً یک ابزار ارزشمند برای متخصصان بازرسی زمین و دارایی و نقشه برداری خواهد بود. این یک راه حل اسکن همه کاره برای عکسبرداری از مناطق بزرگ در فضای باز یا فضاهای پیچیده داخلی در اختیار آنها قرار می دهد.
بازرسی و نقشه برداری سریع
لوازم جانبی رادیویی دوربرد Emesent به Hovermap متصل میشود تا دامنه اتصال را تا 20 برابر افزایش دهد (تا یک کیلومتر برای برنامههای پروازی از سطح زمین). Broodryk اضافه کرد: «رادیو برد بلند ما به اپراتورها اجازه میدهد تا از مزایای کامل قابلیتهای خودکار و نقشه برداری Hovermap ST-X بهره ببرند و دامنه کاربردهای آن را گسترش دهند.
“همچنین با Hovermap ST سازگار است، بنابراین مشتریان فعلی نیز از آن سود خواهند برد.” رادیو برد بلند با قابلیت اسکن محیط های بزرگ و پیچیده در یک پرواز و در عین حال حفظ پیوند ارتباطی برای به روز رسانی نقاط بین راه و پیش نمایش پوشش ابر نقطه در طول پرواز، در زمان اپراتورها در میدان صرفه جویی می کند. این نیاز به اسکن از چندین مکان یا ادغام مجموعه داده ها در پس پردازش را از بین می برد.
ساده کردن گردش کار اسکن لیزری سه بعدی
Aura، پلتفرم پردازش، تجسم و تجزیه و تحلیل یکپارچه Emesent، یک گردش کار ساده را برای کاربران Hovermap فراهم میکند تا دادههای خود را پردازش کنند، نتایج را مشاهده کنند، مجموعه دادهها را تمیز کنند و اندازهگیریهایی را برای استخراج بینش و تصمیمگیری انجام دهند. موتور تجسم آئورا برای ابرهای نقطه ای متراکم و دقیق تولید شده توسط Hovermap ST و ST-X بهینه شده است.
کاربران میتوانند ابرهای نقطهای با بیش از یک میلیارد نقطه را با وضوح کامل مشاهده کنند تا اطمینان حاصل کنند که جزئیات و بینشهای مهم از دست نمیروند. Broodryk اظهار داشت: “Aura راه حلی ارائه می دهد که گردش کار کاربر را بدون درز و بدون دردسر، مهم نیست که مجموعه داده ها چقدر بزرگ یا متعدد، ابرهای نقطه ای متراکم یا ساختارهای سه بعدی پیچیده هستند.” “Aura همچنین پایه و اساس ماژول های تحلیل ابری نقطه ای آینده را که در حال توسعه آن هستیم، ایجاد می کند.”
Hovermap ST-X استقلال پیشرفته پهپاد را برای اسکن مناطق غیرقابل دسترس از GPS فراهم می کند یا می تواند برای اسکن های دستی، کوله پشتی یا روی وسیله نقلیه استفاده شود. (با احترام: Emesent)
در فصل تابستان ١٤٠١ تغییرات شاخص قیمت تولیدکننده بخش مرغداریهای صنعتی کشور نسبت به فصل قبل (تورم فصلی) به ٤٩,٤ درصد رسید که در مقایسه با همین اطلاع در فصل قبل (١٩.٥ درصد)، ٢٩.٩ واحد درصد افزایش یافتهاست. در میان قلمهای مرغداریهای صنعتی، بیشترین افزایش مربوط به قلم” جوجهی یکروزه” (٧٢.١ درصد)، کمترین افزایش مربوط به قلم ” کود” (٩.٣ درصد) میباشد.
چکیده
در فصل تابستان سال ١٤٠١ شاخص قیمت تولید کننده بخش مرغداریهای صنعتی کشور (بر مبنای ١٠٠=١٣٩٥) برابر با ٩١١,١ بوده است که نسبت به فصل قبل (تورم فصلی) ٤٩.٤ درصد و نسبت به فصل مشابه سال قبل (تورم نقطه به نقطه) ٨٩.٦ درصد افزایش یافتهاست. در فصل مورد بررسی میانگین شاخص قیمت چهار فصل منتهی به فصل جاری نیز نسبت به دوره مشابه سال قبل (نرخ تورم سالانه) ٥٢.٤ درصد افزایش یافتهاست.
افزایش تورم فصلی
در فصل تابستان ١٤٠١ تغییرات شاخص قیمت تولیدکننده بخش مرغداریهای صنعتی کشور نسبت به فصل قبل (تورم فصلی) به ٤٩,٤ درصد رسید که در مقایسه با همین اطلاع در فصل قبل (١٩.٥ درصد)، ٢٩.٩ واحد درصد افزایش یافتهاست. در میان قلمهای مرغداریهای صنعتی، بیشترین افزایش مربوط به قلم” جوجهی یکروزه” (٧٢,١ درصد)، کمترین افزایش مربوط به قلم ” کود” (٩,٣ درصد) میباشد.
افزایش تورم نقطه به نقطه
در فصل تابستان ١٤٠١ تغییرات شاخص قیمت تولیدکننده بخش مرغداریهای صنعتی کشورنسبت به فصل مشابه سال قبل (تورم نقطه به نقطه) ٨٩,٦ درصد بودهاست که در مقایسه با همین اطلاع در فصل قبل (٤٦.١ درصد) ٤٣.٥ واحد درصد افزایش داشتهاست.
به عبارتی، میانگین قیمت دریافتی توسط تولیدکنندگان محصولات مرغداریهای صنعتی به ازای تولید قلمهای خود در داخل کشور، در فصل تابستان ١٤٠١ نسبت به فصل تابستان ١٤٠٠، ٨٩.٦ درصد افزایش دارد. در بین قلمهای مرغداریهای صنعتی، کمترین تورم نقطه به نقطه مربوط به قلم ” کود” (٣٣,١ درصد) و بیشترین آن مربوط به قلم “مرغ گوشتی” (١١١,٣ درصد) میباشد.
افزایش تورم سالانه
در تابستان ١٤٠١ تغییرات میانگین شاخص قیمت تولیدکننده محصولات مرغداریهای صنعتی در داخل کشور در چهار فصل منتهی به این فصل نسبت به مدت مشابه در سال قبل به ٥٢,٤ درصد رسید که نسبت به همین اطلاع در فصل قبل (٤٣.٤ درصد)، ٩.٠ واحد درصد افزایش نشان میدهد. در فصل مورد بررسی، در میان قلمهای مرغداریهای صنعتی کشور، کمترین تورم سالانه مربوط به قلم ” کود ” (٢٨,٥ درصد) و بیشترین آن مربوط به قلم “پولت” (٥٧,٠ درصد) میباشد.
شاخص استاني
بررسي شاخص قيمت توليدكننده محصولات مرغداریهاي صنعتي كشور در تابستان ١٤٠١ نشان ميدهد که بیشترین میزان افزایش شاخص کل نسبت به فصل قبل مربوط به استان اردبیل با ٧٦,٣ درصد و کمترین میزان افزایش مربوط به استان سیستان و بلوچستان با ٦.٣ درصد بوده است.
بررسیها نشان میدهد که شاخص کل در فصل جاری نسبت به فصل مشابه سال قبل، در همه استانها با افزایش روبه رو بوده است. بیشترین میزان افزایش مربوط به استان ایلام با ١١٨,٥درصد و کمترین میزان افزایش آن مربوط به استان سیستان و بلوچستان با ٥١.٠ درصد میباشد.
سیارکی به وسعت مایل ها که 66 میلیون سال پیش به زمین برخورد کرد تقریباً تمام دایناسورها و سه چهارم گونه های گیاهی و جانوری این سیاره را از بین برد.بر اساس مطالعه جدیدی که توسط دانشگاه میشیگان انجام شده است، این امر باعث ایجاد یک سونامی هیولایی با امواجی به ارتفاع مایل شد که هزاران مایل از محل برخورد در شبه جزیره یوکاتان مکزیک، کف اقیانوس را در نوردید.
این مطالعه که برای انتشار آنلاین در 4 اکتبر در ژورنال AGU Advances برنامه ریزی شده است، اولین شبیه سازی جهانی سونامی برخورد Chicxulub را ارائه می کند که در یک مجله علمی معتبر منتشر می شود. علاوه بر این، محققان U-M رکوردهای زمین شناسی را در بیش از 100 مکان در سراسر جهان بررسی کردند و شواهدی پیدا کردند که پیش بینی مدل های آنها را در مورد مسیر و قدرت سونامی تایید می کند.
مولی رنج، نویسنده اصلی این مقاله، که این مطالعه مدلسازی را برای پایاننامه کارشناسی ارشد انجام داده است، میگوید: «این سونامی به اندازهای قوی بود که رسوبات حوضههای اقیانوسی را در نیمهی زمین در سراسر جهان برهم زد و فرسایش داد، و یا شکافی در سوابق رسوبی یا مجموعهای از رسوبات قدیمیتر باقی گذاشت. تحت نظر اقیانوسشناس فیزیکی U-M و نویسنده همکار مطالعه، برایان آربیک و دیرینهشناس U-M و تد مور، نویسنده مشترک مطالعه.
بررسی سوابق زمینشناسی بر «بخشهای مرزی»، رسوبات دریایی که درست قبل یا درست پس از برخورد سیارک و انقراض دسته جمعی K-Pg متعاقب آن، که دوره کرتاسه را بسته است، نهشته شده است.
Range که این پروژه را به عنوان یک دانشجوی کارشناسی در آزمایشگاه Arbic در سال 1397 آغاز کرد، گفت: “توزیع فرسایش و وقفه هایی که ما در بالاترین رسوبات دریایی کرتاسه مشاهده کردیم با نتایج مدل ما مطابقت دارد، که به ما اطمینان بیشتری در پیش بینی های مدل می دهد.” گروه علوم زمین و محیط زیست.
نویسندگان مطالعه محاسبه کردند که انرژی اولیه در سونامی ضربه ای تا 30000 برابر بیشتر از انرژی سونامی زمین لرزه اقیانوس هند در دسامبر 2004 بود که بیش از 230000 نفر را کشت و یکی از بزرگترین سونامی ها در تاریخ مدرن است.
شبیهسازیهای این تیم نشان میدهد که سونامی برخورد عمدتاً به سمت شرق و شمال شرق به اقیانوس اطلس شمالی و از جنوب غربی از طریق دریای آمریکای مرکزی (که قبلاً آمریکای شمالی و آمریکای جنوبی را جدا میکرد) به اقیانوس آرام جنوبی تابش میکرد.
در آن حوضهها و در برخی مناطق مجاور، سرعت جریان زیر آب احتمالاً از 20 سانتیمتر در ثانیه (0.4 مایل در ساعت) فراتر رفته است، سرعتی که به اندازهای قوی است که رسوبات ریزدانه در کف دریا را فرسایش دهد.
بر اساس شبیه سازی این تیم، در مقابل، اقیانوس اطلس جنوبی، اقیانوس آرام شمالی، اقیانوس هند و منطقه ای که امروز مدیترانه است تا حد زیادی در برابر قوی ترین اثرات سونامی محافظت شدند. در آن مکانها، سرعت جریان مدلسازیشده احتمالاً کمتر از آستانه ۲۰ سانتیمتر بر ثانیه بود.
برای بررسی رکورد زمین شناسی، U-M’s Moore رکوردهای منتشر شده از 165 بخش مرزی دریایی را تجزیه و تحلیل کرد و توانست اطلاعات قابل استفاده از 120 مورد از آنها را به دست آورد. بیشتر رسوبات از هسته های جمع آوری شده در طول پروژه های علمی حفاری اقیانوس به دست آمد.
اقیانوس اطلس شمالی و اقیانوس آرام جنوبی کمترین مکان ها را با رسوبات مرزی کامل و بدون وقفه در مرز K-Pg داشتند. در مقابل، بیشترین تعداد کامل بخش های مرزی K-Pg در اقیانوس اطلس جنوبی، اقیانوس آرام شمالی، اقیانوس هند و مدیترانه یافت شد.
آربیک، استاد علوم زمین و محیط زیست که ناظر این پروژه بود، گفت: «ما تأییدی را در رکوردهای زمینشناسی برای مناطق پیشبینیشده بیشترین تأثیر در اقیانوس باز یافتیم». شواهد زمین شناسی قطعا مقاله را تقویت می کند.
به گفته نویسندگان، رخنمون های مرز K-Pg در سواحل شرقی جزایر شمالی و جنوبی نیوزلند که بیش از 12000 کیلومتر (7500 مایل) از سایت برخورد یوکاتان فاصله دارند، از اهمیت ویژه ای برخوردار است.
رسوبات به شدت آشفته و ناقص نیوزیلند، که نهشته های اولیستوسرومال نامیده می شوند، در اصل نتیجه فعالیت های زمین ساختی محلی هستند. اما با توجه به قدمت ذخایر و موقعیت آنها به طور مستقیم در مسیر مدلسازی شده سونامی برخورد Chicxulub، تیم تحقیقاتی U-M به منشأ متفاوتی مشکوک است.
Range گفت: “ما احساس می کنیم که این ذخایر در حال ثبت اثرات سونامی ضربه ای هستند و این شاید گویاترین تایید اهمیت جهانی این رویداد باشد.”
بخش مدلسازی مطالعه از استراتژی دو مرحلهای استفاده کرد. ابتدا، یک برنامه کامپیوتری بزرگ به نام هیدروکد، 10 دقیقه اول هرج و مرج این رویداد را شبیه سازی کرد که شامل برخورد، تشکیل دهانه و شروع سونامی بود. این کار توسط یکی از نویسندگان براندون جانسون از دانشگاه پردو انجام شد.
بر اساس یافتههای مطالعات قبلی، محققان یک سیارک با قطر 14 کیلومتر (8.7 مایل) را مدلسازی کردند که با سرعت 12 کیلومتر در ثانیه (27000 مایل در ساعت) حرکت میکرد. به پوسته گرانیتی پوشانده شده توسط رسوبات غلیظ و آب های کم عمق اقیانوس برخورد کرد و دهانه ای به وسعت 100 کیلومتر (62 مایل) را منفجر کرد و ابرهای متراکمی از دوده و غبار را به جو پرتاب کرد.
دو دقیقه و نیم پس از برخورد سیارک، پرده ای از مواد پرتاب شده دیواره ای از آب را از محل برخورد به بیرون رانده کرد و برای مدت کوتاهی موجی به ارتفاع 4.5 کیلومتر (ارتفاع 2.8 مایل) را تشکیل داد که با سقوط پرتاب به عقب فرو نشست. زمین.
ده دقیقه پس از برخورد پرتابه به یوکاتان و در فاصله 220 کیلومتری (137 مایلی) از محل برخورد، موج سونامی به ارتفاع 1.5 کیلومتر (به ارتفاع 0.93 مایل) – حلقه ای شکل و در حال انتشار به بیرون – شروع به فراگیر کرد. در سراسر اقیانوس در همه جهات، طبق شبیه سازی U-M.
در 10 دقیقه، نتایج شبیهسازی هیدروکد iSALE جانسون در دو مدل انتشار سونامی MOM6 و MOST برای ردیابی امواج غولپیکر در سراسر اقیانوس وارد شد. MOM6 برای مدلسازی سونامی در اعماق اقیانوس استفاده شده است و NOAA از مدل MOST به صورت عملیاتی برای پیشبینی سونامی در مراکز هشدار سونامی خود استفاده میکند.
مور، استاد بازنشسته علوم زمین و محیط زیست گفت: «نتیجه بزرگ در اینجا این است که دو مدل جهانی با فرمولبندیهای متفاوت نتایج تقریباً یکسانی به دست آوردند و دادههای زمینشناسی در بخشهای کامل و ناقص با این نتایج مطابقت دارد.» “مدل ها و داده های راستی آزمایی به خوبی مطابقت دارند.”
طبق شبیه سازی تیم:
یک ساعت پس از برخورد، سونامی به خارج از خلیج مکزیک و به اقیانوس اطلس شمالی گسترش یافته بود.
چهار ساعت پس از برخورد، امواج از مسیر دریای آمریکای مرکزی و به اقیانوس آرام عبور کرده بودند.
24 ساعت پس از برخورد، امواج از شرق بیشتر اقیانوس آرام و از غرب بیشتر اقیانوس اطلس را عبور داده و از دو طرف وارد اقیانوس هند شده بودند.
48 ساعت پس از برخورد، امواج سونامی قابل توجهی به اکثر خطوط ساحلی جهان رسیده بود.
برای مطالعه فعلی، محققان تلاشی برای تخمین میزان سیل ساحلی ناشی از سونامی انجام ندادند.
با این حال، مدلهای آنها نشان میدهد که ارتفاع امواج اقیانوس باز در خلیج مکزیک از 100 متر (328 فوت) فراتر میرفت، با ارتفاع موج بیش از 10 متر (32.8 فوت) با نزدیک شدن سونامی به مناطق ساحلی اقیانوس اطلس شمالی و بخشهایی از جنوب. سواحل اقیانوس آرام آمریکا
با نزدیک شدن سونامی به آن خطوط ساحلی و برخورد با آب های کم عمق، ارتفاع موج از طریق فرآیندی به نام shoaling به طور چشمگیری افزایش می یافت. سرعت فعلی برای اکثر مناطق ساحلی در سراسر جهان از آستانه 20 سانتی متر در ثانیه فراتر می رفت.
به گفته نویسندگان این مطالعه، “بسته به هندسه ساحل و امواج در حال پیشروی، بیشتر مناطق ساحلی تا حدی زیر آب می روند و فرسایش می یابند.” “هر سونامی مستند تاریخی در مقایسه با چنین تاثیر جهانی کمرنگ است.”
ویدیو: https://youtu.be/hy6wfjqFBE0
آربیک گفت که یک مطالعه بعدی برای مدل سازی میزان طغیان ساحلی در سراسر جهان برنامه ریزی شده است. این مطالعه توسط واسیلی تیتوف از آزمایشگاه محیط زیست دریایی اقیانوس آرام اداره ملی اقیانوسی و جوی، که یکی از نویسندگان مقاله AGU Advances است، رهبری خواهد شد.
علاوه بر Range، Arbic، Moore، Johnson و Titov، نویسندگان این مطالعه آلیستر آدکرافت از دانشگاه پرینستون، جوزف آنسونگ از دانشگاه غنا، کریستوفر هالیس از دانشگاه ویکتوریا از ولینگتون، کریستوفر اسکاتز از پروژه PALEOMAP و او وانگ از آزمایشگاه دینامیک سیالات ژئوفیزیک NOAA و شرکت دانشگاه برای تحقیقات جوی.
بودجه توسط بنیاد ملی علوم و صندوق حمایت از دانشیاران دانشگاه میشیگان، که توسط جوایز دانشکده مارگارت و هرمان سوکول حمایت می شود، ارائه شده است. شبیه سازی های MOM6 بر روی ابررایانه Flux ارائه شده توسط خدمات فنی محاسباتی تحقیقاتی پیشرفته دانشگاه میشیگان انجام شد.
در فصل تابستان ١٤٠١، شاخص قیمت تولیدکننده بخش صنعت ٧٥٠,٩ میباشد که نسبت به فصل قبل (تورم فصلی) ٢.٣ درصد کاهش، نسبت به فصل مشابه سال قبل (تورم نقطه به نقطه) ٣٠.١ درصد افزایش و در چهارفصل منتهی به فصل جاری نسبت به دوره مشابه سال قبل (تورم سالانه) ٤٠.٤ درصد افزایش داشته است.
شاخص قیمت کل
در فصل تابستان ١٤٠١، شاخص قیمت تولیدکننده بخش صنعت ٧٥٠,٩ میباشد که نسبت به فصل قبل (تورم فصلی) ٢.٣ درصد کاهش، نسبت به فصل مشابه سال قبل (تورم نقطه به نقطه) ٣٠.١ درصد افزایش و در چهارفصل منتهی به فصل جاری نسبت به دوره مشابه سال قبل (تورم سالانه) ٤٠.٤ درصد افزایش داشته است.
کاهش تورم فصلی
در فصل تابستان ١٤٠١، درصد تغییرات شاخص قیمت تولیدکننده بخش صنعت نسبت به فصل قبل (تورم فصلی) ٢,٣- درصد میباشد که در مقایسه با همین اطلاع در فصل قبل (١٢.٥ درصد)، ١٤.٨ واحد درصد کاهش داشته است. به عبارتی، میانگین قیمت دریافتی توسط تولیدکنندگان محصولات صنعتی به ازای تولید کالاهای خود در داخل کشور، در فصل تابستان ١٤٠١ نسبت به فصل قبل، ٢.٣ درصد کاهش دارد.
در این فصل بیشترین تورم فصلی با ٢٣.٢ درصد مربوط به گروه ” ساخت محصولات دارويي، مواد شيميايي مورد استفاده در داروسازي و محصولات دارويي گياهي” و کمترین تورم فصلی با ١.٧ درصد مربوط به گروه “ساخت منسوجات” میباشد. در این فصل شاخص گروههای “ساخت کُک و فراوردههای حاصل از پالايش نفت” و “ساخت فلزات پايه” با ٩.٦ درصد و گروه “ساخت مواد شیمیایی و فراوردههای شیمیایی” با ٣.٧ درصد با کاهش مواجه بودهاند.
کاهش تورم نقطه به نقطه
در فصل تابستان ١٤٠١، درصد تغییرات شاخص قیمت تولیدکننده بخش صنعت نسبت به فصل مشابه سال قبل (تورم نقطه به نقطه) ٣٠,١ درصد میباشد که در مقایسه با همین اطلاع در فصل قبل (٤٦.٣ درصد)، ١٦.٢ واحد درصد کاهش داشته است.
به عبارتی، میانگین قیمت دریافتی توسط تولیدکنندگان محصولات صنعتی به ازای تولید کالاهای خود در داخل کشور، در فصل تابستان ١٤٠١ نسبت به فصل مشابه سال قبل، ٣٠.١ درصد افزایش دارد. در این فصل بیشترین تورم نقطه به نقطه با ٨٠.٧ درصد مربوط به گروه “ساخت مواد غذایی” و کمترین تورم نقطه به نقطه با ١٧.٢ درصد مربوط به گروه “ساخت محصولات رایانهای، الکترونیکی و نوری” میباشد. در این فصل تورم نقطه به نقطه گروه “ساخت فلزات پايه” ١.٠- درصد بوده است.
کاهش تورم سالانه
در فصل تابستان١٤٠١، درصد تغییرات شاخص قیمت تولیدکننده بخش صنعت در چهار فصل منتهی به این فصل نسبت به دوره مشابه سال قبل، ٤٠,٤ درصد میباشد که در مقایسه با همین اطلاع در فصل قبل (٤٨.٠ درصد)، ٧.٦ واحد درصد کاهش داشته است.
به عبارتی، میانگین قیمت دریافتی توسط تولیدکنندگان محصولات صنعتی به ازای تولید کالاهای خود در داخل کشور، در چهار فصل منتهی به تابستان ١٤٠١ نسبت به دوره مشابه سال قبل، ٤٠.٤ درصد افزایش دارد. در این فصل بیشترین تورم سالانه با ٧١.٢ درصد مربوط به گروه” ساخت محصولات غذايي ” و کمترین تورم سالانه با ٢١.٢ درصد مربوط به گروه “ساخت محصولات رایانهای، الکترونیکی و نوری” میباشد.
دکتر شارلوت اسمیت برای یک متخصص GIS نسبتاً جدید خودآموخته، تأثیر زیادی بر جامعه آموزش GIS داشته است.یک مدرس دانشکده در دانشگاه کالیفرنیا (UC)، برکلی، و استاد مدعو در Instituto Tecnológico y de Estudios Superiores de Occidente (ITESO) در گوادالاخارا، مکزیک، دورههای GIS را تدریس میکند که پیشینه او در بهداشت عمومی و علوم بهداشت محیطی را به روشی واقعاً یکپارچه در بر میگیرد.
دکتر شارلوت اسمیت ویراستار مجله پیشگیری از بیماریهای مزمن مرکز کنترل و پیشگیری از بیماریها (CDC) است. یکی از بخشهایی که او روی آن تمرکز میکند «عکسهای فوری GIS» است که شامل مقالههای 1000 کلمهای درباره پروژههای بهداشت عمومی است که شامل کاوش یا تجزیه و تحلیل فضایی است. اسمیت و همکارانش از مردم دعوت می کنند تا مقالاتی را برای انتشار ارسال کنند.
اسمیت گفت: «این هیجان انگیز است که دانشآموزان قدرت گنجاندن مکان در تحلیلهای آماری، تجسم دادهها و داستانگویی را درک کنند. “آنها در حال یادگیری تکنیک های GIS هستند، اما در نهایت، همه چیز در مورد این است که آنها می توانند با این فناوری انجام دهند و چگونه می توانند از اطلاعات برای حمایت و ایجاد تغییراتی که می خواهند ببینند استفاده کنند.”
اسمیت همیشه یک معلم نبوده و تلاش های او در GIS تنها حدود هفت سال پیش آغاز شد. اما او تقریباً به محض پایان یافتن اولین مجموعه درسهای یادگیری از آموزش Esri شروع به نوشتن برنامههای درسی GIS کرد و به سرعت خود را در جامعه آموزش GIS غرق کرد.
او گفت: «آنچه مرا جذب کرد و در دنیای تحلیل فضایی نگه داشت، جنبه اجتماعی است. “GIS بسیار در مورد جامعه است، و این انجمن واقعا می تواند شما را با انگیزه نگه دارد.”
اسمیت کار خود را به عنوان یکی از لیتوگرافی های معروف گرافیست هلندی M. C. Escher توصیف می کند، “با پله ها در همه جهات و افراد در همان زمان بالا و پایین می روند.”
او در رشته میکروبیولوژی در دانشگاه میشیگان تحصیل کرد و به عنوان محقق در بخش میکروبیولوژی و ایمونولوژی ادامه داد. از آنجا به دانشگاه کلمبیا رفت تا کارهای مشابهی را به عنوان زیست شناس مولکولی انجام دهد.
پس از آن، به نظر می رسد، کنجکاوی سیری ناپذیر و میل بی حد و حصر او برای یادگیری، زمانی که ایده مشارکت بیشتر در کار بهداشت جامعه را به ذهنش خطور کرد. اسمیت به ارتقای سلامت در محیط های محلی علاقه مند شد، بنابراین تصمیم گرفت مدرک کارشناسی ارشد خود را در رشته بهداشت جامعه از کالج بروکلین دریافت کند. او معتقد است که تحصیل بیشتر و کسب مدارک معتبر بهترین راه برای ایجاد تغییر شغلی است.
اسمیت مدرک تحصیلی خود را به پایان رساند، اما او هرگز به طور کامل در آن زمینه کار نکرد، زیرا اتفاقاً علاقه جدیدی در این زمینه ایجاد شد.
او گفت: «در طول دوره کارشناسی ارشد، یک دوره کارآموزی در اداره آب شهر نیویورک گرفتم که به شغل تبدیل شد و به شغلی در بخش آب آشامیدنی تبدیل شد. به همین دلیل است که به دانش آموزان می گویم هرگز به فرصت ها نه نگویید. شما نمیدانید که از آن چه خواهید ساخت یا به چه چیزی تبدیل خواهد شد.»
اسمیت این کار را جذاب میدانست، بهویژه وقتی نوبت به ارزیابی کیفیت آب میرسید.
«مردم شیر آب را باز میکنند، و فکر میکنند همین است. خوب است، “او گفت. اما اکنون با فلینت، میشیگان و بحران اخیر آب در جکسون، می سی سی پی، می توانیم ببینیم که آب پاک نباید بدیهی انگاشته شود. اگر آسان بود، آن مشکلات در چند ساعت حل می شد. برای اطمینان از کیفیت خوب آب آشامیدنی، نیاز به دانش فنی، اراده سیاسی، تامین مالی، مقررات و آموزش اپراتور است.
اسمیت 6 سال را در اداره آب شهر نیویورک گذراند تا اینکه مدیر کیفیت آب یک شرکت فرانسوی شد که 35 شرکت آب آشامیدنی را در ایالات متحده و همچنین سایر شرکتها در سراسر جهان مالک و اداره میکرد. در این مرحله از حرفه خود، او بر حل مشکلات کیفیت آب و توسعه برنامه های انطباق با مقررات تمرکز کرد. هنگامی که شرکت تابعه آمریکایی فروخته شد، او این انتخاب را داشت که یا به شرکت خرید بپیوندد یا نه.
او گفت: “من انتخاب نکردم.” «و وقتی «نه» را انتخاب میکنید، فرصتی برای انجام کاری جدید و بهتر دارید.»
این زمانی بود که او Charlotte Smith & Associates, Inc. را تأسیس کرد، یک شرکت مشاوره که به شرکتهای برق در سراسر جهان کمک میکند تا کیفیت آب را بهبود بخشند. برای تقریباً 30 سال، او ارزیابیهای سیستمهای آب را انجام داده و اپراتورهای سیستم توزیع آب را برای یافتن و حل مشکلات کیفیت آب، در میان بسیاری از مشاغل دیگر، آموزش داده است.
در میان همه اینها، اسمیت تصمیم گرفت برای ادامه تحصیل در مقطع دکترا به مدرسه برود. او شنیده بود که لژیونلا، باکتری عامل بیماری لژیونرها، در تک یاخته ها زندگی می کند و از هضم و در نتیجه تخریب جلوگیری می کند.
اسمیت گفت: «فکر میکردم این یکی از جالبترین چیزهایی بود که در تمام زندگیام شنیده بودم، و فکر میکردم که این کار چه میکند. “خب، هیچ کس قرار نبود به شارلوت اسمیت و همکاران پول بدهد تا بفهمد.”
بنابراین او یک کمک هزینه تحقیقاتی علمی برای دستیابی به نتایج (STAR) از آژانس حفاظت از محیط زیست (EPA) دریافت کرد و برای پاسخ به این سوال وارد برنامه دکترا در دانشگاه کالیفرنیا برکلی شد. او دو باکتری – H. پیلوری، که باعث سرطان معده می شود، و E. coli، که باعث بیماری اسهالی می شود – برای اینکه ببینیم آیا آنها می توانند از هضم در تک یاخته ها زنده بمانند یا خیر.
اسمیت گفت: «پاسخ برای هلیکوباکتر پیلوری منفی و برای E. coli بله است. خوشحال بودم چون جوابم را داشتم.»
به گفته اسمیت، پایان نامه دکترا باید اینگونه باشد.
او گفت: “شما باید در مورد یک سوال وسواس داشته باشید.” “اگر چنین چیزی را دارید، پس به مدرسه برگردید، کمی وقت بگذارید، به سوال پاسخ دهید و به زندگی خود ادامه دهید.”
اسمیت به زندگی خود ادامه داد. پس از پاسخ به سؤال خود، او نقش کاملاً جدیدی را در دانشگاه برعهده گرفت و دروس علوم بهداشت محیطی و آب آشامیدنی و بهداشت را در دانشگاه برکلی در دانشکده بهداشت عمومی تدریس کرد. او به مدیریت Charlotte Smith & Associates ادامه داد (و هنوز هم دارد). علاوه بر این، این مرحله جدید از زندگی او به او فرصت داد تا فناوری ای را که در مورد آن کنجکاو شده بود کشف کند: GIS.
او گفت: «من فقط یک سری کامل از درسهای یادگیری Esri را انجام دادم. “آنها شگفت انگیزند. آنها برای مطالعه مستقل عالی هستند، زیرا تقریباً هر مرحله یک تصویر دارد، بنابراین شما می دانید که در مسیر درستی قرار دارید.
اسمیت از طریق درسهای بیاموز، از GIS در علوم بهداشت عمومی و بهداشت محیط قدردانی کرد.
او گفت: “GIS به ما کمک می کند تا تصویر کامل را درک کنیم.” هرچه بیشتر و بیشتر به نقشهسازی و تحلیل فضایی وارد شدم، چهار دوره GIS ایجاد کردم. در نهایت دروسی را که تدریس میکردم کنار گذاشتم، و اکنون همه چیز GIS است. من یک مشتاق GIS شده ام.”
دانشآموزان او از GIS برای ترسیم مکانهای فوارههای نوشیدنی در سرتاسر برکلی استفاده کردهاند تا به شهر کمک کنند مصرف آب را به جای نوشیدنیهای شیرین افزایش دهند. دانشآموزان از ArcGIS Survey123 برای جمعآوری دادهها در مورد سرویسهای بهداشتی دانشگاه استفاده کردهاند تا اطمینان حاصل شود که دانشگاه دارای حمامهای در دسترس و شامل جنسیت است. آنها از Survey123 برای جمع آوری داده های کمی و کیفی در مورد دسترسی به آب آشامیدنی سالم در گوادالاخارا و در جوامع روستایی دریاچه چاپالا، مکزیک استفاده کرده اند. اسمیت به دانشآموزان خود یاد میدهد که چگونه از فناوری Esri مانند ArcGIS Online، ArcGIS Dashboards و ArcGIS StoryMaps و همچنین نحوه انجام تجزیه و تحلیل جغرافیایی استفاده کنند.
اسمیت با اشاره به دوره های هشت هفته ای و ترم خود گفت: “من از آنچه این دانش آموزان می توانند در مدت زمان کوتاهی خلق کنند شگفت زده شده ام.”
در حالی که اسمیت حدود پنج سال است که GIS را به دانشجویان کارشناسی و کارشناسی ارشد تدریس می کند، او تا سال گذشته هرگز یک دوره رسمی دانشگاهی در GIS گذرانده بود. او که همیشه یادگیرنده مادام العمر بود، در برنامه کارشناسی ارشد علوم کاربردی در تحلیل فضایی برای سلامت عمومی دانشگاه جان هاپکینز ثبت نام کرد.
او گفت: «از آنجایی که من هرگز یک دوره GIS را گذرانده بودم، هیچ الگویی برای آموزش نداشتم. روشی که من GIS را تدریس کرده ام بر اساس روشی است که دروس دیگر را تدریس کرده ام. اما من سوال کردم که آیا این بهترین راه برای آموزش GIS است.
اسمیت که از اساتید و دانشجویان جانز هاپکینز یاد میگیرد، میگوید که نه تنها با شرکت در این برنامه استاد بهتری میشود، بلکه میآموزد به روشهای مختلف به پروژهها نزدیک شود.
اسمیت گفت: “جامعه GIS پر از افرادی است که مایل به اشتراک گذاری، ارتباط و حمایت از یکدیگر هستند.” “به عنوان یک فرد مبتلا به بیماری عصبی و تحرک محدود، عضوی از جامعه GIS من را حفظ می کند.”
ادغام دوربین Mosaic360 با فناوری RIEGL Lidar – Mosaic اعلام کرده است که دوربین کروی جدید Mosaic X این شرکت اکنون با سیستم های نقشه برداری موبایل RIEGL سازگار است. اسکنرهای RIEGL V-Line در حال حاضر برخی از بالاترین عملکرد و شناخته شده ترین سیستم های اسکن لیزر سیار در جهان هستند. Mosaic طراح و تولید کننده دوربین های نقشه برداری موبایل 360 درجه با وضوح بالا است.
توسعه Mosaic X بر ارائه یک دوربین 360 درجه با وضوح بالا، شاتر جهانی با مهر زنی دقیق GNSS برای دستیابی به وضوح و دقت بصری فوقالعاده در یک لحظه متمرکز بود. به همین دلیل، Mosaic X شرایط لازم برای ادغام با سیستمهای اسکن لیزری موبایل مانند سریهای RIEGL VMX، VMQ و VMY را برآورده میکند.
تصویربرداری از زیرساخت های جاده با دقت عکس واقعی
نقشه برداری سیار در گستره وسیعی از صنایع و بخش ها، از سازمان های خصوصی گرفته تا دولتی، و از شرکت های بیمه و مهندسی گرفته تا شرکت های مخابراتی و نقشه برداری، کاربردهای گسترده ای دارد. هر کاربر نهایی خواستههای متفاوتی برای نقشهبرداری زیرساختهای خود دارد، اما دو خواسته ثابت، تصاویر واقعی عکس با وضوح بالا و دادههای بسیار دقیق، متراکم و غنی از ویژگیها هستند.
سیستمهای نگاشت سیار مانند RIEGL VMY-1، RIEGL VMY-2، RIEGL VMQ-1HA و RIEGL VMX-2HA، دادههای سهبعدی سطوح اشیاء را به روشی کارآمد و بسیار دقیق ضبط میکنند.
دوربینهای نقشهبرداری موبایل مانند Mosaic 51 و Mosaic X زیرساختهای جادهای را با دقت واقعی عکسبرداری میکنند، که برای چشم انسان بسیار قابل درکتر از ابر نقطهای از یک اسکنر لیزری است.
آزادسازی پتانسیل ابرهای نقطه ای دقیق
Rostislav Lisovy، یکی از بنیانگذاران Mosaic و معاون مهندسی، مزایایی را که مشتریان میتوانند انتظار داشته باشند از آنها لذت ببرند، توضیح داد: «جفت شدن بین سیستمهای تصویربرداری 360 درجه و سیستمهای اسکن لیزری سیار منجر به ایجاد ابرهای نقطهای مبتنی بر Lidar با دقت بالا میشود که با رنگآمیزی عکس های واقع گرایانه این نتیجه سپس از مزایای یک ابر نقطه دقیق و تصاویر پانوراما – برای اندازه گیری دقیق و ارزیابی بافت ها برخوردار خواهد بود.
«مشتریان ما قادر خواهند بود دادههای ارزشمندتری را جمعآوری کنند که به فرآیند ارزیابی خودکار وضعیت زیرساخت از دادههای ابر نقطهای کمک میکند – نه فقط از یک تصویر پانوراما».
جفری مارتین، مدیرعامل و یکی از بنیانگذاران موزائیک، اظهار داشت: «ما درخواست های زیادی از سوی مشتریان خود داشته ایم که به دنبال استفاده هماهنگ از محصولات RIEGL و Mosaic هستند. Mosaic X با تصاویر پانوراما با وضوح بالا تحت تاثیر قرار میگیرد و تصاویر تک لنز با زمان دقیق را برای رنگآمیزی ابر نقطهای و همچنین تولید تصاویری با وضوح بالا بدون تحریف و ارجاع جغرافیایی با ۱۲ مگاپیکسل در هر لنز ارائه میدهد.
دوربینهای با وضوح بالا Mosaic X اکنون با خط سیستمهای اسکن لیزری سیار RIEGL سازگار هستند.
Topodrone، طراح و سازنده تجهیزات Lidar با دقت بالا برای نصب بر روی هواپیماهای بدون سرنشین، وسایل نقلیه و کوله پشتی، مستقر در سوئیس، یک راه حل مبتنی بر پهپاد Aquamapper را برای نقشه برداری عمق سنجی و ساخت و ساز دریایی راه اندازی کرده است. دستگاه جدید جمعآوری دادههای چندوظیفهای و تجهیزات Topodrone Lidar Ultra با موفقیت برای نقشهبرداری هوابرد در پروژه ساختوساز بزرگراه در رومانی، اتحادیه اروپا برای ارائه یک دوقلو دیجیتال کامل از یک منطقه مورد مطالعه استفاده شدهاند.
Aquamapper یک سخت افزار کاملاً جدید است که در داخل توسط Topodrone توسعه یافته و به مجموعه کاملی از راه حل های نقشه برداری فتوگرامتری، Lidar و عمق سنجی کمک می کند. این محصول جدید که بر روی یک پهپاد نصب شده است ترکیبی از راندمان سرعت بالا (تا 14 کیلومتر در ساعت) و دقت را ارائه می دهد. این یک راه حل آماده PPK است که با پهپاد DJI Matrice 300 RTK سازگار است. حوزه های کاربردی شامل بررسی های حمام سنجی دریای آزاد تا عمق 100 متری، بررسی های کمیت و محاسبه رسوبات و بررسی های نگهداری دوره ای استخرهای ذخیره سازی است.
نقشه برداری بستر رودخانه Bathymetric مبتنی بر پهپاد
Topodrone Aquamapper و Lidar Ultra برای نقشه برداری هوابرد در Autostrada Sibiu – Pitești، Secțiunea 2: Boița – Cornetu، یک پروژه راه سازی اروپایی استفاده شده اند. بزرگراهی در یکی از سخت ترین زمین های رومانی ساخته می شود و شامل هفت تونل، 24 پل و 18 راهرو است. کریدور پهپاد لیدار و بررسی عمق سنجی توسط شرکت رومانیایی Graphein Topo SA برای ارائه نقشه های دقیق و اطلاعات به روز در مورد سطح زمین، ساختمان ها، جاده ها، شبکه های خطوط برق، مرزهای کاداستر و غیره و همچنین رودخانه ها انجام شد.
Topodrone Lidar Ultra در پهپاد DJI M300 برای گرفتن داده های اسکن لیزری از ارتفاع 100 تا 120 متری بر فراز زمین های ناهموار جنگلی برای پوشش دهی یک راهرو به طول 32 کیلومتر و عرض 400 متر در 14 پرواز استفاده شد، در حالی که Aquamapper به همان DJI M30 برای بررسی عمق سنجی بر روی شش تقاطع رودخانه متصل شد.
مزیت کلیدی تجهیزات حمام سنجی جدید Topodrone توانایی تصویربرداری از بستر رودخانه با دقت سطح سانتی متری با سرعت بالا در حالت تمام اتوماتیک و بدون قایق است. بنابراین به ما این امکان را می دهد که در مناطق صعب العبور و کم آب کار کنیم. علاوه بر این، همان پهپاد حامل را می توان هم برای بررسی لیدار و هم برای بررسی عمق سنجی استفاده کرد. ترکیبی از یک پژواک، GNSS و سیستم اندازه گیری اینرسی به دستیابی به نتایج دقیق پس از پردازش کمک می کند.
مزیت کلیدی تجهیزات حمام سنجی جدید Topodrone توانایی گرفتن بستر رودخانه است.
مخازن باستانی آب دریا منبع جدیدی از سرنخهایی از تغییرات آب و هوایی در اقیانوسهای ناپدید شده و اقیانوسهای ما ارائه میدهند. اکنون ریزترین بقایای مایع یک دریای داخلی باستانی که هزاران سال به دام افتاده اند، آشکار شده اند. کشف غافلگیرکننده آب دریا که در آمریکای شمالی کنونی به مدت 390 میلیون سال مهر و موم شده است، راه جدیدی را برای درک چگونگی تغییر اقیانوس ها و سازگاری با آب و هوای متغیر باز می کند. این روش همچنین ممکن است در درک چگونگی ذخیره ایمن هیدروژن در زیر زمین و انتقال آن برای استفاده به عنوان منبع سوخت بدون کربن مفید باشد.
ساندرا تیلور، نویسنده اول این مطالعه و دانشمند وزارت انرژی در شمال غربی اقیانوس آرام ملی گفت: «ما کشف کردیم که میتوانیم اطلاعاتی را از این ویژگیهای معدنی آب دریا در آزمایشگاه استخراج کنیم که میتواند به اطلاعات زمینشناسی، مانند شیمی آب دریا از دوران باستان کمک کند.
تیلور با همکاران PNNL، Daniel Perea، John Cliff و Libor Kovarik برای انجام آنالیزها با همکاری ژئوشیمیدانان دانیل گرگوری از دانشگاه تورنتو و تیموتی لیون از دانشگاه کالیفرنیا، ریورساید، کار کرد. تیم تحقیقاتی کشف خود را در شماره دسامبر 2022 Earth and Planetary Science Letters گزارش کردند.
دریاهای باستانی؛ ابزار مدرن
بسیاری از انواع مواد معدنی و جواهرات حاوی محفظه های کوچک مایع به دام افتاده هستند. در واقع، برخی از سنگهای قیمتی به خاطر حبابهای مایع نورگیرشان که در داخل آن به دام افتادهاند، ارزشمند هستند. چیزی که در این مطالعه متفاوت است این است که دانشمندان با استفاده از میکروسکوپ پیشرفته و تجزیه و تحلیل های شیمیایی توانستند آنچه را که در داخل کوچکترین حفره های آب وجود دارد را آشکار کنند.
یافته های این مطالعه تایید کرد که آب به دام افتاده در داخل سنگ با مشخصات شیمیایی دریای آب شور داخلی باستانی که زمانی مناطق شمالی نیویورک را اشغال می کرد، مطابقت دارد. در دوره دونین میانه، این دریای داخلی از میشیگان امروزی تا انتاریو، کانادا امتداد داشت. این منطقه دارای یک صخره مرجانی برای رقیب دیواره مرجانی بزرگ استرالیا بود. عقربهای دریایی به اندازه یک وانت در آبهایی که جاندارانی مانند تریلوبیتها و اولین نمونههای خرچنگ نعل اسبی را در خود جای داده بودند، گشت میزدند.
اما در نهایت آب و هوا تغییر کرد و همراه با آن تغییر، بیشتر موجودات و خود دریا ناپدید شدند و تنها بقایای فسیلی در رسوبات باقی ماندند که در نهایت به نمونه سنگ پیریت مورد استفاده در آزمایش فعلی تبدیل شد.
سرنخ هایی از آب و هوای باستانی و تغییرات آب و هوایی
دانشمندان از نمونههای سنگی به عنوان شواهدی استفاده میکنند تا چگونگی تغییر اقلیم در طول زمان طولانی زمینشناسی را کنار هم بگذارند.
گرگوری، زمین شناس دانشگاه تورنتو و یکی از رهبران این مطالعه گفت: ما از ذخایر معدنی برای تخمین دمای اقیانوس های باستانی استفاده می کنیم. اما نمونه های مفید نسبتا کمی در پرونده زمین شناسی وجود دارد.
گرگوری گفت: «رسوبات نمکی از آب دریا [هالیت] محبوس شده در سنگها نسبتاً نادر است، بنابراین میلیونها سال در سوابق مفقود است و آنچه ما در حال حاضر میدانیم بر اساس مکانهایی است که در آن هالیت یافت شده است. در مقابل، پیریت در همه جا یافت می شود. نمونه برداری با این تکنیک می تواند میلیون ها سال سابقه زمین شناسی را باز کند و به درک جدیدی از تغییر اقلیم منجر شود.
سورپرایز آب دریا
تیم تحقیقاتی در تلاش برای درک یک موضوع زیست محیطی دیگر – شسته شدن سمی آرسنیک از سنگ – بودند که متوجه نقصهای کوچک شدند. دانشمندان ظاهر این کانیهای پیریت خاص را بهعنوان framboids توصیف میکنند – که از کلمه فرانسوی تمشک گرفته شده است – زیرا آنها مانند خوشههایی از بخشهای تمشک در زیر میکروسکوپ به نظر میرسند.
تیلور گفت: «ما ابتدا به این نمونهها از طریق میکروسکوپ الکترونی نگاه کردیم و این نوع حبابهای کوچک یا ویژگیهای کوچک را در framboid دیدیم و تعجب کردیم که آنها چیستند.
با استفاده از تکنیکهای تشخیص دقیق و حساس توموگرافی کاوشگر اتمی و طیفسنجی جرمی – که میتواند مقادیر ناچیزی از عناصر یا ناخالصیها را در مواد معدنی تشخیص دهد – این تیم متوجه شد که حبابها واقعاً حاوی آب هستند و ترکیب شیمیایی نمک آنها با آب دریاهای باستانی مطابقت دارد.
از دریای باستانی تا ذخیره انرژی مدرن
این نوع مطالعات همچنین پتانسیل ارائه بینش جالبی را در مورد چگونگی ذخیره ایمن هیدروژن یا سایر گازها در زیر زمین دارند.
تیلور می گوید: “هیدروژن به عنوان یک منبع سوخت کم کربن برای کاربردهای مختلف انرژی مورد بررسی قرار می گیرد. این امر مستلزم این است که بتوان مقادیر زیادی هیدروژن را در مخازن زمین شناسی زیرزمینی به طور ایمن بازیابی و ذخیره کرد. بنابراین درک نحوه تعامل هیدروژن با سنگ ها مهم است.”
“توموگرافی کاوشگر اتمی یکی از معدود تکنیک هایی است که در آن نه تنها می توانید اتم های هیدروژن را اندازه گیری کنید، بلکه در واقع می توانید ببینید کجای مواد معدنی می رود. این مطالعه نشان می دهد که نقص های کوچک در مواد معدنی ممکن است تله های بالقوه برای هیدروژن باشد. بنابراین با استفاده از با این روش میتوانیم بفهمیم در سطح اتمی چه اتفاقی میافتد، که سپس به ارزیابی و بهینهسازی استراتژیهای ذخیرهسازی هیدروژن در زیرسطح کمک میکند.”
این تحقیق در EMSL، آزمایشگاه علوم مولکولی محیطی، یک مرکز کاربر دفتر علوم DOE در PNNL انجام شد. لیون و گریگوری برای استفاده از تسهیلات از طریق یک فرآیند درخواست رقابتی درخواست دادند. این تحقیق همچنین با کمک مالی شورای تحقیقات علوم طبیعی و مهندسی کانادا حمایت شد.
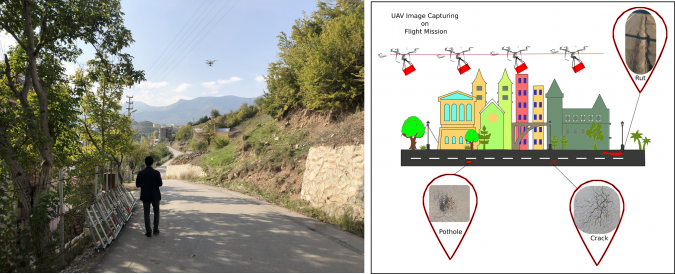
وقتی صحبت از نظارت بر وضعیت جادهها میشود، فناوری پهپاد میتواند بر بسیاری از معایب مرتبط با روشهای سنتی غلبه کند که میتواند زمانبر، کار فشرده و گاهی ذهنی باشد. این مقاله فرصتهایی را برای استخراج خودکار اطلاعات دادههای مبتنی بر پهپاد در مورد ساخت و ساز جاده، موجودی و محیطهای جاده بررسی میکند.
جاده یکی از شاخصه های شهری است. آنها فواصل طولانی را به طور مؤثر، سریع، راحت و ایمن به یکدیگر متصل می کنند. بنابراین، شرایط فعلی آنها باید نظارت شود تا از مطابقت با استانداردها اطمینان حاصل شود. با این حال، روش های سنتی برای نظارت بر وضعیت جاده ها زمان بر، کار فشرده و گاهی ذهنی هستند.
یک روش نسبتاً جدید برای نظارت بر وضعیت جاده، فناوری وسایل نقلیه هوایی بدون سرنشین (UAV یا “پهپاد”) است. پهپادها یکی از سریعترین فناوریهای در حال رشد در زمینههای مختلفی مانند کشاورزی و کشاورزی دقیق، جنگلها، نظارت بر سلامت اکولوژیکی و ساختاری و نقشهبرداری زمینشناسی، توپوگرافی و باستانشناسی هستند.
داده های مبتنی بر پهپاد با پرواز پهپاد بر فراز منطقه مورد مطالعه و گرفتن تصاویر متعدد جمع آوری می شود. در کنترل از راه دور پهپاد دو نوع مختلف از برنامه های پروازی، یعنی برنامه های پرواز دستی و خلبان خودکار وجود دارد. هر دو طرح مزایای خاص خود را دارند. طرح پرواز خلبان خودکار برای جمع آوری داده ها ساده است.
برنامه پرواز از راه دور در رابط تنظیم می شود و پهپاد پرواز می کند و داده ها را به طور خودکار دریافت می کند. با این حال، برنامه پرواز باید با توجه به ویژگی های سکوی پهپاد تنظیم شود که حداکثر زمان پرواز، سرعت پرواز، ارتفاع از سطح زمین و فاصله افقی است.
کسب، پردازش و مشاهده داده های پهپاد
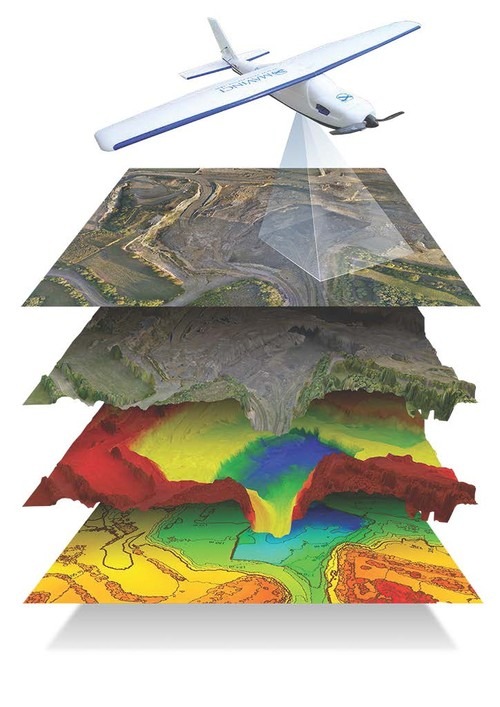
برنامه پرواز خلبان خودکار ممکن است به دلیل زمین یا شرایط سخت منطقه مورد مطالعه، مانند داشتن شیب های تند یا داشتن کابل ها و تیرها، سازه ها یا درختان خط برق بالای سر، مناسب نباشد. در این موارد، پرواز دستی ممکن است به دلایل ایمنی بهتر باشد. علاوه بر این، دو نوع مختلف تصویر – تصاویر نادر و مایل – را می توان با استفاده از فناوری UAV ثبت کرد (شکل 1 را ببینید).
تصاویر مایل کیفیت مدل سه بعدی (3 بعدی) را به خصوص در ساختارهای عمودی افزایش می دهد. دوربین روی پهپاد یکی دیگر از اجزای مهم برای جمع آوری داده های با کیفیت بالا است و مشخصات دوربین به طور مستقیم بر کیفیت تصاویر گرفته شده تأثیر می گذارد. تصاویر دو بعدی (2 بعدی) به دست آمده را می توان برای نظارت بر شرایط جاده استفاده کرد. با این حال، آنها ممکن است از نقشه برداری دقیق پشتیبانی نکنند زیرا تصاویر منفرد هیچ اطلاعات عمقی ارائه نمی دهند.
شکل 1: جمع آوری داده های مبتنی بر پهپاد و بازرسی وضعیت جاده.
مدل های سه بعدی را می توان از تصاویر دو بعدی نیز تولید کرد. اکثر پهپادها معمولاً دارای سیستم ماهوارهای ناوبری جهانی (GNSS) و حسگرهای واحد اندازهگیری اینرسی (IMU) هستند که مکانهای دوربین را با دقت در سطح سانتیمتری ارائه میکنند. بنابراین، مدل سه بعدی را می توان با استفاده از تکنیک های ساختاری از حرکت (SfM) تولید کرد. تکنیک SfM نقاط پیوندی را در هر تصویر پیدا می کند که می تواند در تصاویر متوالی مطابقت داشته باشد. علاوه بر این، مکان ها و جهت گیری های دوربین نیز با استفاده از معادلات فتوگرامتری تخمین زده می شوند.
در نهایت، ابرهای نقطه سه بعدی شی مورد نظر را می توان بازسازی کرد. چندین گزینه نرم افزار تجاری کاربرپسند (Pix4D Mapper، Agisoft Metashape، 3Dsurvey، UASMaster، Photomodeler، و غیره) و نرم افزار منبع باز (VisualSFM، MicMac، COLMAP، و غیره) برای تبدیل تصاویر دو بعدی به ابرهای نقطه سه بعدی با استفاده از تکنیک SfM وجود دارد.
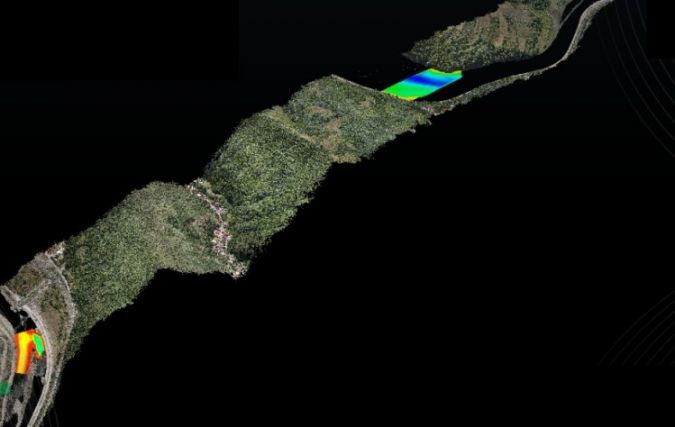
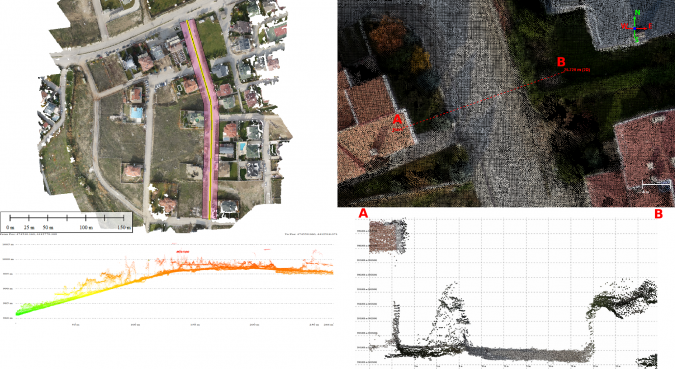
علاوه بر این، ارتوموزائیک، مدل های دیجیتال سطح (DSM) و مدل های دیجیتال زمین (DTMs) را می توان با استفاده از چنین نرم افزارهایی تولید کرد. این خروجی ها را می توان با استفاده از نرم افزارهای مختلفی مانند Quick Terrain Modeller و Global Mapper مشاهده کرد (شکل 2 را ببینید).
شکل 2: ابر نقطه سه بعدی در Quick Terrain Modeller و DSM در Global Mapper.
استخراج اطلاعات جاده از داده های پهپاد
اطلاعات جاده مانند سطح جاده، خط مرکزی و خط کشی خطوط، مشخصات، مقاطع عرضی و مشکلات را می توان از ابرهای نقطه سه بعدی استخراج کرد. این بینش در مورد وضعیت جاده برای بهبود عملکرد جاده، راحتی و ایمنی قابل توجه است. برای جمع آوری اطلاعات راه، ابتدا سطح راه باید از سایر اشیاء شهری یا روستایی متمایز و طبقه بندی شود.
الگوریتم های یادگیری ماشینی مانند Random Forest را می توان برای طبقه بندی سطوح جاده ها استفاده کرد و این الگوریتم ها نتایج طبقه بندی را هم سریع و هم با دقت بالا تولید می کنند. هنگامی که سطح جاده طبقه بندی شد، سایر اطلاعات هندسی را می توان به راحتی استخراج کرد.
خط کشی و خط وسط جاده معمولاً برای مدلسازی جاده، برنامه ریزی و ایمنی استفاده می شود. علاوه بر این، این اطلاعات برای اهداف ناوبری، به ویژه در زمینه رانندگی خودکار در آینده نزدیک، به طور فزاینده ای مهم خواهد بود. اگر خطوط جاده با استفاده از یک رنگ خاص (بیشتر سفید یا زرد) مشخص شده باشند، می توان آنها را مستقیماً با استفاده از ویژگی RGB استخراج کرد.
مقادیر RGB رنگ مدل سه بعدی را بیان می کنند و با استفاده از تصاویر از نرم افزار پردازش تصویر منتقل می شوند. در برخی موارد، به ویژه در جاده های محلی، خطوط جاده ممکن است با رنگ خاصی مشخص نشده باشند یا خط کشی های جاده آسیب دیده و پیوسته نباشند. در چنین مواردی، چندین روش – مانند الگوریتمهای بهبود یافته مبتنی بر نمودار Voronoi – میتواند برای استخراج خط وسط جاده و خطها با استحکام و دقت بیشتری معرفی شود.
«پروفایل جاده» به بخش عمودی گرفته شده در امتداد محور تراز (خط مرکزی) جاده اشاره دارد. تجزیه و تحلیل شیب جاده مهم است زیرا در صورت یخ زدگی می تواند منبع خطر باشد.
پروفایل های جاده را می توان از طریق DSM استخراج کرد. داده های DSM را می توان از ابرهای نقطه سه بعدی با استفاده از الگوریتم های درون یابی مختلف تولید کرد. یکی از متداول ترین الگوریتم های درون یابی، وزن معکوس فاصله (IDW) است. مقادیر ارتفاع به صورت شطرنجی در DSM ثبت می شود. سپس، بعد Z خط مرکز جاده از DSM استخراج می شود تا مشخصات جاده را به راحتی و با دقت به دست آوریم (شکل 3 را ببینید).
مقاطع عرضی جاده ایجاد یک سکوی جاده با شیب های خاص عمود بر خط مرکزی راه را فراهم می کند. همچنین مقاطع برای انتقال آب از سطح جاده به کنار جاده و طراحی کانال های زهکشی در کنار جاده مهم هستند. به طور مشابه، بعد Z خطوط عمود بر خط مرکز جاده از DSM استخراج می شود تا مقاطع عرضی جاده به راحتی و با دقت به دست آید (شکل 3 را ببینید).
شکل 3: خط مرکز راه، پروفیل و استخراج مقطع.
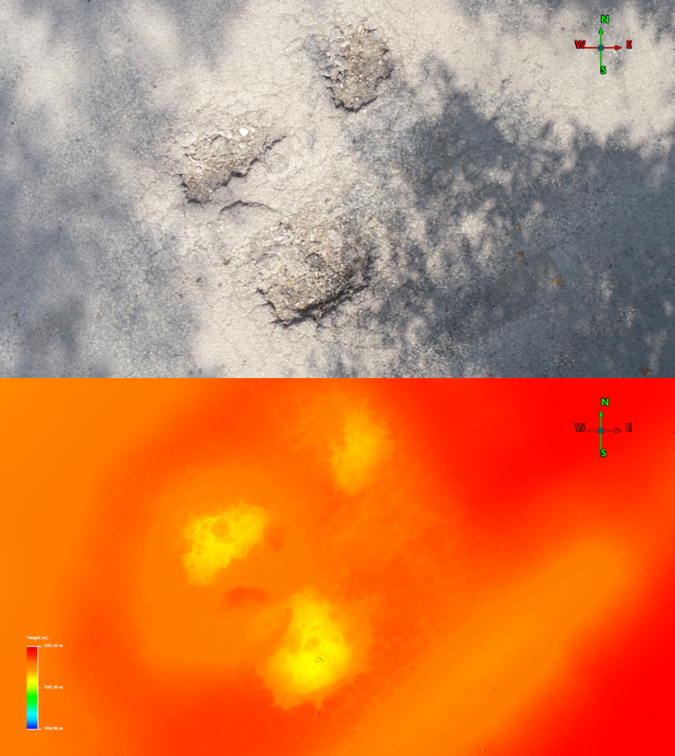
در نهایت، پریشانی جاده را می توان از ابرهای نقطه سه بعدی نیز تشخیص داد. تشخیص دقیق پریشانی جاده یک ورودی مهم برای اقدامات تعمیر و نگهداری است. نگهداری و تعمیرات به موقع باید انجام شود تا عمر سرویس جاده افزایش یابد و راحتی و ایمنی جاده برای رانندگان به حداکثر برسد.
علاوه بر این، تعمیرات و نگهداری به موقع ممکن است هزینه های طولانی مدت را کاهش دهد. روشها و تکنیکهای مختلف قادر به تشخیص خودکار پریشانی جاده هستند (شکل 4 را ببینید).
شکل 4: بازرسی آسیب جاده.
نتیجه گیری
پهپادها علاوه بر کاربرد در سایر رشتهها، در بررسی و تولید انواع اطلاعات بهروز جادهای اهمیت زیادی دارند. به طور خاص، استفاده از پهپادها در پروژههای جادهای در سالهای اخیر افزایش یافته است زیرا آنها میتوانند نقش مهمی در کنترل موجودی و ایمنی جادهها، بررسیهای مکرر زمین و تجزیه و تحلیل شبکههای جادهای پایدار، و نقشهبرداری و طرحریزی فعالیتها ایفا کنند.
استخراج خودکار اطلاعات با نرم افزارهای بسته کوچک و همچنین نرم افزارهای سنتی GIS بسیار موثر است. در نتیجه، امکان استخراج اطلاعات در مورد ساخت و ساز جاده، موجودی و محیط جاده از داده های مبتنی بر پهپاد وجود دارد. اجتناب ناپذیر است که در آینده نزدیک، استفاده از سیستم های پهپاد جایگاه خود را به عنوان یک روش اندازه گیری ضروری در ساخت و ساز جاده ها و تولید سایر اطلاعات جاده ای حفظ کند.
مصاحبه Lynn Radford با دکتر نادین علامه، مدیرعامل کنسرسیوم فضایی باز (OGC)
در اواسط دهه 1990، نرم افزار سیستم اطلاعات جغرافیایی (GIS) به طور فزاینده ای در حوزه منابع طبیعی و دفاعی مورد استفاده قرار گرفت. با این حال، هزینه های بالا، انعطاف ناپذیری و ناتوانی در به اشتراک گذاری داده های مکانی بین سیستم ها باعث ناامیدی شدید می شد، زیرا کاربران مجبور به استفاده از روش های ناکارآمد، زمان بر و مستعد انتقال داده بودند.
این منجر به ایجاد کنسرسیوم فضایی باز (OGC) برای توسعه استانداردهای بین المللی برای قابلیت همکاری شد. امروزه، استانداردهای جامعه OGC مبنای ایجاد رابط های باز و رمزگذاری در محصولات و خدمات مبتنی بر مکان برای استفاده در سراسر جهان را تشکیل می دهد. در این مصاحبه، دکتر نادین علامه، مدیر عامل OGC، پیشرفت هایی را که در طول سه دهه گذشته به دست آمده است، و آنچه هنوز باید انجام شود تا اطلاعات جغرافیایی واقعاً به نفع کل جامعه «قابل یافتن، در دسترس، قابل استفاده و قابل استفاده مجدد (FAIR)» شود را منعکس می کند.
کنسرسیوم فضایی باز در اواسط دهه 1990 تاسیس شد. بخش ژئوفضایی از آن زمان تاکنون چگونه تکامل یافته است؟
صادقانه بگویم، دادههای جغرافیایی به قدری گسترده مورد استفاده قرار گرفتهاند و بیش از همیشه در بسیاری از صنایع، کارکردها و حوزهها بین رشتهای هستند که مطمئن نیستم دیگر چیزی به نام «بخش جغرافیایی» وجود داشته باشد. شما نمی توانید آن را به عنوان یک صنعت مستقل ببینید – geospatial همه جا وجود دارد. اما برای اینکه دادههای مکانی واقعاً مفید باشند، همیشه باید به یک مشکل خاص در یک حوزه خاص مانند حمل و نقل، هوانوردی، کشاورزی یا موارد دیگر مرتبط باشند.
جامعه جهانی با چالشهای عمدهای مواجه است که بسیاری از آنها به تغییرات آب و هوایی مربوط میشوند، و دادههای مکانی میتوانند نقش مهمی در کمک به رفع بسیاری از این چالشها داشته باشند. اما هیچ کس تمام داده ها را ندارد، بنابراین باید آنها را با یکدیگر مبادله کنیم. در عین حال، شرکت های BigTech اکنون اغلب داده های بهتری نسبت به دولت ها دارند.
این یک پویایی جالب ایجاد می کند و آژانس های نقشه برداری ملی را وادار می کند تا خود را دوباره اختراع کنند و خود را برای همکاری بیشتر باز کنند، زیرا متوجه می شوند که نوآوری باید از مشارکت های دولتی و خصوصی (PPPs) حاصل شود. من فکر می کنم این بهترین زمان برای حضور در فضای مکانی است!
OGC چگونه با این همگام است؟
زمانی که ما 28 سال پیش تاسیس شدیم، هدف ایجاد یک انجمن بی طرف برای دولت، دانشگاه و صنعت برای همکاری در استانداردهای باز برای افزایش قابلیت همکاری جغرافیایی در همه سیستم ها بود. تمرکز عمدتاً بر جنبههای فنی مرتبط کردن سیستمهای مختلف به منظور تبادل داده بود. اما اگر تغییر نکنید، شکست می خورید، بنابراین OGC در طول سال ها تغییر کرده است، اگرچه برای مدت طولانی ما هنوز عمدتاً به دلیل استانداردهای خود شناخته شده بودیم.
از زمانی که سه سال پیش وارد هیئت شدم، تلاشی عمدی انجام دادیم تا از «چی» فاصله بگیریم و بیشتر روی «چرا» تمرکز کنیم: کمک به اعضای خود برای حل جمعی مشکلات با استفاده از دادههای مکانی مبتنی بر استانداردها و نوآوری.
با در نظر گرفتن مشکلات آنها به عنوان نقطه شروع، سپس به استانداردهایی که در حال حاضر داریم و هنوز باید آنها را توسعه دهیم نگاه می کنیم – زیرا همه چیز آنقدر جدید است که استانداردهای مرتبط گاهی حتی هنوز وجود ندارند. فراتر از آن، ما شکافهای قابلیت همکاری را با بهترین شیوهها در مورد نحوه استفاده از استانداردها و آزمایشهای انطباق پر میکنیم تا اطمینان حاصل کنیم که محصولات یا راهحلها واقعاً از استانداردها استفاده میکنند.
ما همچنین تعهد خود را برای کاهش موانع تشدید می کنیم تا مردم بتوانند از داده های مکانی در همه صنایع استفاده کنند. به عنوان مثال، ما اکنون بومی ابر شدهایم، با درک اینکه چگونه «ابر» باعث ایجاد یک تغییر اساسی در نحوه ذخیره، اشتراکگذاری، دسترسی، ادغام و تجزیه و تحلیل دادههای مکانی میشود. به طور کلی، ما در تلاش هستیم تا پایه استانداردهای خود را مدرنسازی کنیم تا آنها را برای توسعهدهندگان دوستدارتر کنیم – بازار انبوهتر – به طوری که شما بتوانید APIهای جغرافیایی را با دادههای دیگر ترکیب و مطابقت دهید تا از تصمیمگیریتان پشتیبانی کند، بدون اینکه متخصص جغرافیایی باشید.
ما امیدواریم که دانشمندان کامپیوتر، توسعه دهندگان نرم افزار و بسیاری دیگر که تا کنون آن را به عنوان “داده های مکان” به جای “داده های مکانی” می شناسند، یاد بگیرند که برای اتصال نقطه ها ما را به عنوان جامعه پیشرو با ابزارها، دانش و داده هایی ببینند که می تواند کار را برای آنها آسان تر کند.
دکتر نادین علامه، مدیر عامل کنسرسیوم فضایی باز (OGC): «دادههای جغرافیایی در بسیاری از جنبههای جامعه حیاتی است؛ به پیشبینی و واکنش به تغییرات آبوهوایی و بلایای طبیعی، زیرساختهای دادههای مکانی دریایی برای حفاظت از اقیانوسهایمان فکر کنید، و البته همه ما نقش آن را در نظارت و مدیریت بیماریها دیدیم. – در طول همهگیری کووید-19 گسترش یافته است.”
چگونه همه اینها پایه عضویت شما را تغییر می دهد؟
تعداد اعضای ما نه تنها در حال افزایش است – از 450 به 580 نفر در سال گذشته – بلکه در حال متنوع شدن است. در گذشته، صنعت، دولت ها و دانشگاه ها هر کدام یک سوم از کل را تشکیل می دادند، اما اکنون 42 درصد از اعضای ما از صنعت هستند و بسیاری از آنها استارتاپ هستند. ما باید تا جایی که می توانیم فراگیر باشیم، زیرا فضای جغرافیایی دیگر در گوشه ای نیست. و این ترکیبی از مشاغل جوان و نوآور در کنار شرکتها و دولتهای سنتیتر و بزرگتر، تضمین میکند که ما به حرکت رو به جلو ادامه میدهیم.
OGC چگونه به استفاده از داده های مکانی برای خیر جامعه کمک می کند؟
خب، داده های مکانی در بسیاری از جنبه های جامعه حیاتی است. به پیش بینی و واکنش به تغییرات آب و هوایی و بلایای طبیعی فکر کنید، برای زیرساخت های داده های مکانی دریایی برای محافظت از اقیانوس های ما، و البته همه ما نقش آن را در نظارت و مدیریت شیوع بیماری در طول همه گیری COVID-19 دیدیم. انجمن بین رشتهای ما در سراسر جهان، مردم، جوامع و فناوریها را به هم متصل میکند تا به آنها در حل این چالشهای جهانی و رفع نیازهای روزمره کمک کند.
و ماموریت ما در ساخت بلوکهای ساختمانی – یعنی دادههای مکانی – «قابل یافتن، در دسترس، قابل همکاری و قابل استفاده مجدد (FAIR)» با استفاده از استانداردها، این را ملموس میکند. مهمتر از همه، از آنجایی که استانداردهای ما به غیر از اعضای ما برای همه افراد و سازمانهای دیگر باز است، OGC در نهایت به مزایا برای همه سرعت میبخشد.
به طور متوسط، 70 درصد از زمان پروژه های یکپارچه سازی داده ها صرف آماده سازی داده ها می شود، بنابراین با سهولت دسترسی سازمان ها – و حتی کارشناسان غیرمکانی – برای حل این مشکلات، به داده های قابل استفاده برای حل این مشکلات صرفه جویی می کنیم. از پول و تن از زمان. علاوه بر این، من فکر می کنم مهم است که به این نکته اشاره کنیم که داشتن داده های بسیار با مسئولیت خاصی همراه است.
ما مفتخریم که یکی از اولین سازمانهایی هستیم که منشور Locus را امضا کرده است، که استفاده مسئولانه از دادههای موقعیت مکانی را ترویج میکند، و ما به طور منظم جلساتی را برای ایجاد آگاهی در مورد استفاده اخلاقی از دادهها در میان اعضای خود برگزار میکنیم و مناطقی را که ممکن است مورد سوء استفاده قرار گیرند را مشخص کنیم. .
اما من حدس میزنم سازمان شما به تنهایی نمیتواند این کار را انجام دهد؟
درست است! ما متخصص در زمین فضایی هستیم، اما نمی توانیم در هر حوزه ای متخصص باشیم. برای مثال یک پروژه شهر هوشمند را در نظر بگیرید. این شامل طیف گسترده ای از جنبه ها مانند سنسورها، آب و هوا، انرژی و ویژگی های متحرک است. بنابراین، علاوه بر اعضای خود، ما حدود صد شریک اتحاد داریم: هم در سطح فنی و هم در کارشناسان حوزه. به این ترتیب، ما می توانیم از همان ابتدا شرکای متخصص مربوطه را درگیر کنیم. علاوه بر این، مسائلی مانند تغییرات آب و هوایی به جهان توسعه یافته محدود نمی شود، بنابراین ما مشتاق هستیم به کشورهای در حال توسعه نیز کمک کنیم تا سرعت خود را افزایش دهند.
این مستلزم کار در بالاترین سطح دولت است، مانند ISO، IHO، USGS، NASA، ESA و UN-GGIM. اما در حالی که ما در سطح جهانی فعال هستیم، مشکلات فوری معمولاً محلی هستند. اینجاست که انجمن های منطقه ای ما وارد می شوند و از گفتگوها و اقدامات در مورد مواردی مانند قرارداد سبز و افق 2022 در اروپا، قانون جدید داده های جغرافیایی در ایالات متحده، SDI قطب شمال در کانادا، ظرفیت سازی و ترجمه اسناد در آمریکای لاتین حمایت می کنند. ، و غیره.
علاوه بر این، ما میزبان حدود 70 گروه کاری مختلف در حوزه های مختلف، از بلایا و آب و هوا گرفته تا دوقلوهای دیجیتالی هستیم. این رویکرد اعضای ما را قادر میسازد تا افراد دیگری را با مسائل و اهداف مشابه بیابند، گرد هم آیند و عمیقتر بگردند یا بینشهایی را در مورد موارد استفاده خاص به اشتراک بگذارند – چه در حوزه خود یا در منطقه خود.
به عنوان بخشی از تعهد ما به گشودگی و به اشتراک گذاری دانش، هر کارمند هر سازمان عضو – بزرگ یا کوچک – می تواند از پورتال برای جستجوی اعضای دیگر استفاده کند، در جلسات سه ماهه اعضا در سراسر جهان شرکت کند – که علاوه بر شبکه سازی عالی هستند. به هر حال، جلسات واقعی – و به هر یک از گروه های کاری بپیوندید. من متوجه شده ام که استارت آپ ها به خصوص از عضویت در این جامعه از نظر به دست آوردن اعتبار و اعتماد بیشتر سود می برند. بعلاوه رعایت استانداردهای بین المللی شناخته شده، ارتباط مشتریان بالقوه را چه از لحاظ فنی و چه غیر فنی آسان تر می کند.
نادین علامه میخواهد OGC به عنوان خانه همه چیز مربوط به دادههای مکانی در نظر گرفته شود – مکانی که میتوانید با دیگران ارتباط برقرار کنید، تصمیم بگیرید از کدام فناوری استفاده کنید، استارتآپهای جدید بیابید، به شکلدهی استراتژیهای دولتی کمک کنید و به توسعه استانداردها کمک کنید… بخشی فعال از یک جامعه هستید
صنعت زمین فضایی در حال حاضر چقدر به عادلانه شدن داده ها کمک می کند؟ و چه کارهای بیشتری باید انجام شود؟
فناوری به سرعت در حال پیشرفت است و نوآوری ها در حال افزایش هستند – مانند محاسبات ابری، رایانش لبه، 5G، اینترنت اشیا، هوش مصنوعی و اکتشاف فضا – اما هزینه های بلایا نیز در حال افزایش است، بنابراین به نظر می رسد که هنوز از داده ها برای تا چه حد می تواند زندگی مردم را در این سیاره بهبود بخشد. «FAIR» دلایل این امر را خلاصه میکند: اطلاعات اغلب هنوز به سختی یافت میشوند، دسترسی به آن سخت است، ادغام آن دشوار است و تکرار آنچه در گذشته کارآمد است، دشوار است.
این در جریان سیل اخیر در آلمان و آتش سوزی های جنگلی در کالیفرنیا بسیار مشهود بود. خانهها و زندگیها صرفاً به این دلیل ویران شدند که اطلاعات درست به موقع در دسترس نبود، یا اگر بود، هیچکس نمیدانست با سرعت کافی با آن چه کند. من فکر میکنم یکی از دلایلی که ما به اندازه کافی پیشرفت نمیکنیم این است که بسیاری از شرکتها هنوز بیش از حد فرصتطلب هستند و در تلاش برای بازدهی کوتاهمدت هستند. ما میتوانیم با همکاری یکدیگر به چیزهای بیشتری دست یابیم، اما هنوز تعداد کمی از مدیران کسبوکار چنین فکر میکنند. بنابراین ما به رهبری بیشتری نیاز داریم. این در مورد داشتن یک دیدگاه بلند مدت است.
به هر حال، این برای دولتها نیز صادق است، که هنوز هم بزرگترین مشتریان پروژههای زمینفضایی هستند. در حالت ایدهآل، آنها باید در تشویق شرکتهایی که سرمایهگذاری میکنند – و بهویژه استارتآپها – به سازمانهایی مانند OGC بپیوندند تا قبل از اینکه همه چیز به یک آشفتگی بزرگ تبدیل شود، در اکوسیستم بزرگتر قرار بگیرد. زیرا قابلیت همکاری یک مشکل کوتاه مدت نیست. بیایید صادق باشیم… ساختن چیزی که به عنوان یک راه حل مستقل کار کند بسیار آسان است، اما پس از آن ما فقط با منابع داده متعددی مواجه می شویم که با یکدیگر صحبت نمی کنند. به عنوان مثال، ما شاهد پروژه های ماهواره ای تک ماموریتی هستیم.
اما تفکر بزرگ و احساس مسئولیت جهانی شرکت کجاست؟ ما باید بنشینیم و دادهها را در مقطعی قابل اجرا کنیم، و انجام این کار در حال حاضر آسانتر است به جای پنج سال که هزینه بیشتری دارد. این مستلزم تعهد بیشتر به همکاری و مشارکت بیشتر است تا افراد مناسب بتوانند از همان ابتدا در توسعه استانداردها مشارکت داشته باشند. تنها در این صورت است که می توانیم هماهنگ کردن سیلوها و اطمینان از اینکه آنها می توانند با یکدیگر صحبت کنند، شروع کنیم. این امر نوآوری را سرعت می بخشد و پای را برای همه رشد می دهد.
فرآیند توسعه یک استاندارد بین المللی جدید شامل چه مواردی است؟
تولید یک استاندارد OGC که شامل فرآیند توسعه محتوای فنی مبتنی بر اجماع بینالمللی بسیار رسمی و نسبتاً طولانی است که با بررسی شدید و رایگیری رسمی، توسط چهار کمیته مدیریت میشود. با این حال، همه چیز در سال 2022 به قدری سریع پیش می رود که امروزه هیچ کس نمی تواند وقت خود را تلف کند، بنابراین ما روند را تغییر داده و آن را بسیار چابک تر کرده ایم. در برنامه نوآوری ما، یک استاندارد می تواند توسط هر گروهی از اعضا آغاز شود.
آنها گرد هم می آیند و در یک فرآیند تحقیق و توسعه مشترک بر روی چالش های فضایی در دنیای واقعی در یک سری از سرعت ها، در یک سری از بسترهای آزمایشی یا پروژه های آزمایشی کار می کنند. مستندات کار آنها به استانداردی مناسب برای توسعهدهندگان تبدیل میشود، از جمله کد، نمونهها و قطعههای قابل استفاده مجدد. بسترهای آزمایشی برای آزمایشهای فنی مانند توسعه API، هوش مصنوعی و یادگیری ماشینی، جریان دادههای سه بعدی، سیستمهای مرجع هماهنگ برای فضا، یکپارچهسازی حسگرها و آزمایشهای بومی ابری هستند – این موارد بسیار آیندهنگر است!
این به کارشناسان در سراسر جهان اجازه می دهد تا با آزمایش محصولات و ایده های خود در عمل، نوآوری را تسریع بخشند. و البته هدف نهایی توسعه طرحی است به طوری که در صورت وقوع سیل یا بلایای طبیعی دیگر، بتوانید تحت فشار زمان به اطلاعات آماده برای تصمیم گیری دسترسی داشته باشید تا مجبور نباشید هر بار از صفر شروع کنید. ما در حال حاضر 30 عضو مختلف داریم که روی ایجاد چنین طرحی برای سیل کار می کنند و برنامه هایی برای انجام همین کار برای آتش سوزی های جنگلی، خشکسالی و بیماری های همه گیر وجود دارد.
مشارکت OGC در انجمن استانداردهای Metaverse که اوایل امسال راه اندازی شد چیست؟
متاورس شاید آخرین دوقلوی دیجیتالی توزیع شده جهان باشد: نه تنها دنیای واقعی را به صورت سه بعدی شبیه سازی می کند، بلکه در واقع آن را در یک محیط 4 بعدی کاملاً غوطه ور تکرار می کند که خطوط بین واقعی و مصنوعی را محو می کند. با این حال، متاورس یک چیز واحد نیست، بلکه مانند اینترنت، مجموعهای از پلتفرمها و فناوریها است. به این ترتیب، برای اطمینان از همکاری همه چیز برای تشکیل یک کل منسجم، استانداردهای باز، دانش و بهترین شیوه ها برای موفقیت آن کاملاً اساسی خواهد بود.
با این حال، به عنوان یک فناوری جدید، بسیاری از استانداردهایی که برای حل مشکلات در متاورژن مورد نیاز خواهند بود، هنوز وجود ندارند. به همین دلیل است که ما انجمن استانداردهای Metaverse را تأسیس کردیم. دادههای مکانی در متاورژن ضروری خواهند بود: دادههای رصد زمین، دادههای ارتفاع سه بعدی، دادههای حملونقل، اطلاعات ساختمانها، شمارش درختان، دوقلوهای دیجیتالی اقیانوس، مناطق شهری و غیره. و جامعه OGC میتواند در زمینههای سه بعدی، مدلسازی و شبیهسازی، هوش مصنوعی، جریان، واقعیتهای افزوده و مجازی، مسیریابی، نقشهبرداری و موارد دیگر – همه در مقیاس، تخصص داشته باشد.
بنابراین، ما در حال راه اندازی یک گروه کاری Geo for Metaverse هستیم تا گفتگو با طراحان و توسعه دهندگان در جامعه metaverse را در مورد استفاده از داده های مکانی بلادرنگ، از جمله در برنامه های گیمیفیکیشن، تسهیل کنیم. از وزش باد از میان درختان گرفته تا امواج روی آب، اثرات میتوانند بر اساس دادههای واقعی و نه فقط یک ماکت باشند… احتمالات بسیار زیاد و بسیار هیجانانگیز هستند.
آرزوهای شما برای آینده چیست؟
من میخواهم OGC به عنوان خانه همه چیز مربوط به دادههای مکانی در نظر گرفته شود – مکانی که میتوانید با دیگران ارتباط برقرار کنید، تصمیم بگیرید که از کدام فناوری استفاده کنید، استارتآپهای جدید پیدا کنید، به شکلدهی استراتژیهای دولتی کمک کنید و به توسعه استانداردها کمک کنید… جایی که در آن هستید. بخشی فعال از یک جامعه من مایلم عضویت ما دو یا حتی سه برابر شود – نه فقط برای تعداد، بلکه به این دلیل که یک پایگاه عضویت گستردهتر از اکوسیستم بسیار بزرگتر پشتیبانی میکند.
و در نهایت، من میخواهم OGC بهجای استانداردهای ما به خاطر تأثیر ما شناخته شود. چه در زمینه آب و هوا یا همهگیری، من از ما میخواهم که درک و انعطافپذیری جهان را با اطمینان از عادلانه بودن دادههای مکانی تسریع کنیم تا دانشمندان بتوانند بر آنچه که بهترین انجام میدهند تمرکز کنند. اگر بتوانیم با هم در ایجاد پایه ای برای استانداردهای زمین فضایی بومی ابری موفق باشیم، ساده سازی اساسی تلاش و هزینه مورد نیاز برای اشتراک گذاری و استفاده از اطلاعات مکانی را تصور کنید.
انفجار نوآوری را به لطف در دسترس قرار دادن قدرت جغرافیایی برای همه تصور کنید. و تصور کنید که چگونه گرفتن بهترین شیوهها برای دادههای آماده تحلیل و جریانهای کاری اطلاعات آماده تصمیم در نقشهها میتواند تلاشهای اجتنابی و کاهشی را برای محافظت از افراد بیشتری در سیاره ما در برابر بلایای آینده بهبود بخشد!
سایت Geonline، سایتی مرجع برای مرتفع نمودن نیاز علاقمندان، پژوهشگران، دانشجویان و دانش آموزان در حوزه جغرافیا است که برای تمامی سنین و سطوح مطالب کاربردی دارد.