Sepentrio روی پروژه های اتوماسیون بندری با Kalmar، یک شرکت فنلاندی که طیف گسترده ای از راه حل ها و خدمات جابجایی محموله را به بنادر، پایانه ها، مراکز توزیع و صنایع سنگین ارائه می دهد، کار کرده است. من در مورد این همکاری با Stef van der Loo، مدیر دسترسی به بازار در Sepentrio صحبت کردم. در ادامه گزیدهای از گفتگوی ما آمده است.
چالش های موجود در یک بندر چیست؟
در ترمینال یا پورت کانتینری، همه چیز به هم متصل است و بنابراین پیچیده است. اخیراً، GNSS محبوبتر شده است، بهویژه زمانی که با ناوبری اینرسی همراه باشد، زیرا این فناوری توانایی بیشتری در ارائه دقت در سطح سانتیمتری حتی در محیطهای چالش برانگیز پیدا کرده است که ممکن است خط دید ماهوارههای GNSS تا حدی توسط کانتینرها یا سازهها مسدود شود. . چه چیزی باعث دقت بالاتر می شود؟
این کنترلر کانتینر کالمار دارای یک گیرنده GNSS/INS با دقت بالا Sepentrio و یک سیستم اینرسی است که در محیط های چالش برانگیز با دید کم ماهواره ای کار می کند. (تصویر: کالمار)
هر سال، هر ترمینال تعداد معینی کانتینر را روی هم قرار می دهد، اما تمام اطلاعات مربوط به آنها به طور خودکار به سیستم عامل ترمینال (TOS) داده نمی شود. گاهی اوقات، اپراتورها باید به دنبال کانتینرهای نابجا بگردند، که ممکن است نیاز به توقف عملیات و استقرار پرسنل اضافی داشته باشد. علاوه بر این، رفتن به این حیاط ها چندان امن نیست.
این یکی از دلایلی است که پورت ها شروع به استقرار سیستم های موقعیت یابی کردند. با این حال، ده سال پیش، با دقت متر، آنها همیشه در حال شکست بودند. در حال حاضر، پیشرفت در فناوری GNSS را قادر ساخته است که برای این چالش مناسب شود. در پایانهها، میتوانید از سیستمهای GNSS یا INS برای مدیریت ترافیک وسایل نقلیه، وسایل نقلیه و وظایف خودران یا برای به دست آوردن موقعیت یک کانتینر استفاده کنید.
به عنوان مثال، هنگامی که یک پشتهگیر دستی به پشته میرسد و ظرف را در جای خود قفل میکند، داشتن یک موقعیت بسیار قابل اعتماد در سطح سانتیمتری بسیار مهم است. با پردازش داده ها از سیستم های کنترل به TOS، خطاها افزایش می یابد. برای اطلاع دقیق از موقعیت یک ظرف در هنگام قرار دادن آن در پشته، خطاها نباید بیش از نیم متر باشد. بنابراین، قابلیت اطمینان و دقت GNSS/INS برای موقعیت یابی کانتینر بسیار مهم است.
آیا IMU ها را خریداری می کنید و تمام ادغام را انجام می دهید؟
ما IMU ها را بیشتر از دستگاه های آنالوگ می خریم. راه حل ناوبری اینرسی یکپارچه خود ما است. ما روی ناوبری اینرسی در چندین بازار – از جمله لجستیک، استخراج مستقل، و روباتیک کشاورزی تمرکز می کنیم.
تقسیم کار بین شما و کلمار چگونه است؟
Kalmar هم OEM و هم یکپارچه ساز است. آنها یک مربی برای اتوماسیون پایانه های لجستیک هستند. ما عمدتاً به عنوان یکپارچه ساز با آنها کار می کنیم. آنها مانند سایر یکپارچه سازها به یک ترمینال می روند و سیستم ها و سایر تجهیزات را نصب می کنند. کالمار یک مجموعه حسگر کامل با انواع سنسورها ساخت و آن را در بسته های خود مانند SmartPort ادغام کرد.
با اصل آموزش مربی، مهندسان ما کارکنان کالمار را آموزش دادند، بنابراین آنها کنترل خط اول نصب و عیب یابی را دارند. سپس ما حاضریم تا جایی که بتوانیم از آنها حمایت کنیم. ما یک حلقه بازخورد مداوم با چندین مشتری تدارکات برای پیشنهادات و توصیه های محصول برای تکامل محصولات و خدمات خود برای این بخش داریم.
کانتینرهای دسته دار
GNSS
حامل استرادل در حال کار مجهز به DELTA-3S. (تصویر: Canva)
یکی از بزرگترین شرکتهای کانتینری در جهان به راهحلی برای مدیریت کشتیهای حملونقل خود نیاز داشت، که وسایل نقلیه حمل و نقل کانتینری تخصصی در بنادر هستند که میتوانند کانتینرهای بزرگ را برداشته و به کامیونها، قطارها یا دیگر پشتههای کانتینر منتقل کنند.
این برای اپراتورهای ترمینال کانتینری بسیار چالش برانگیز است زیرا بنادر محیط های عملیاتی بسیار پیچیده ای هستند که سایر خدمات دریایی مانند ذخیره و مدیریت محموله، حمل و نقل کالا و ترخیص کالا از گمرک را نیز ارائه می دهند. برای جابجایی ایمن و کارآمد کانتینرها، پایانههای مدرن علاوه بر کریرهای استرادل، ساختمانها، تجهیزات و جرثقیلها نیز دارند. همه این زیرساخت ها چندین مسیر را ایجاد می کنند که بر قابلیت های گیرنده های GNSS تاکید می کند.
برای توسعه و نصب این سیستم جدید برای وسایل نقلیه حمل بار، شرکت کانتینری به JAVAD GNSS و ALLSAT GmbH ، یک شرکت مهندسی، ژئودتیک و الکترونیک آلمانی که در سال 1991 تأسیس شد و از سال 1995 شریک توزیع آلمانی JAVAD بوده است، روی آورد. در سال 2022، ALLSAT GmbH یک مفهوم دوقلو دیجیتال جدید را برای تامین و پشتیبانی از راه اندازی چند صد راه حل مریخ نورد JAVAD GNSS در سه بندر دریایی بین المللی به کار گرفت.
این امر مستلزم به دست آوردن داده های موقعیتی در زمان واقعی و بسیار دقیق برای جابجایی حامل های استرادل و بارگذاری آن در یک سیستم اطلاعات ترمینال برای کنترل و مستندسازی بود.
ALLSAT یک طرح مفهومی ژئودتیکی را به کار گرفت که گیرندههای JAVAD GNSS Delta-3S و آنتنهای RingAnt G5T و Grant-G5T را برای بررسی دقیق دو ایستگاه مرجع GNSS در هر پورت ادغام میکند، سپس سیستم را از یک منبع بر روی تمام خودروهای حامل استرادل راهاندازی کرد. همچنین راهحلی با استفاده از دو ایستگاه مرجع با کارکرد اضافی ایجاد کرد که دادههای تصحیح RTK را برای همه GNSS (GPS، Galileo، GLONASS و BeiDou) در آدرسهای IP/فرکانسهای رادیویی مختلف پخش میکنند.
همه مریخ نوردهای JAVAD RTK به لطف 874 کانال و پردازنده های موازی خود می توانند داده ها را از هر دو منبع تصحیح به صورت موازی دریافت و پردازش کنند. این دو مزیت را ارائه می دهد. اول، یک بازگشت جامع را در صورت بعید به وجود می آورد که یک ایستگاه مرجع از کار بیفتد. دوم، قابلیت اطمینان، سرعت و دقت مریخ نوردها را که در محیطی مملو از سایه سیگنال و تأثیرات چند مسیره کار می کنند، بسیار بهبود می بخشد.
ALLSAT با همکاری نزدیک با مشتری خود و JAVAD GNSS توانست این پروژه را از ایده اولیه تا تایید و راه اندازی، تنها در چند هفته اجرا کند. ترکیبی از ایستگاههای مرجع زائد و چند صورت فلکی و JAVAD GNSS چند پایه RTK راهحلی را بهدست آورد که بسیار قابل اعتماد و در دسترس است و علیرغم شرایط چالشبرانگیز محیطی، عملکرد مداوم را فراهم میکند. علاوه بر این، JAVAD GNSS بهروزرسانیهای سیستمافزار را برای عمر دستگاهها ارائه میکند که مشتری را قادر میسازد تا 10 سال آینده به این راهحل مریخ نورد پایه تکیه کند.
ردیابی قطار
سیستم های M3
M3 Systems ، یک شرکت جغرافیایی فرانسوی-بلژیکی که در سال 1999 تأسیس شد، مدتها از فعالیتهای تحقیق و توسعه آژانسهای فضایی و هوانوردی غیرنظامی اروپا حمایت میکند. همچنین محصولاتی را که از طریق فعالیت های تحقیق و توسعه خود توسعه داده است، به بازار عرضه می کند. در سالهای اخیر، M3 Systems فعالیتهای خود را در بخشهای خودروسازی و ریلی گسترش داد.
برای توسعه یک دستگاه جدید برای قطارها، با دو شرکت بلژیکی شریک شد: Logiplus که سیستمهای الکترونیکی داخلی قطارها را تولید میکند و ALSTOM بلژیک، بخشی از گروه ALSTOM، که قطارها و تجهیزات را برای خطوط قطار میسازد. هدف از طراحی محصول، توسعه یک حسگر هیبریدی بود که هم از حسگر GNSS برای ارائه موقعیت مطلق و هم از یک واحد اندازهگیری اینرسی (IMU) برای جبران موانع محیطی مانند درختان و درههای شهری با محاسبه موقعیت قطار استفاده میکند. در آخرین موقعیت مطلق مبتنی بر GNSS، جرمی اسکلتون، سرپرست پروژه در M3 Systems توضیح داد.
IMUها مدتهاست با GNSS همراه شدهاند، زیرا هر فناوری محدودیتهای دیگری را جبران میکند: IMUها از دریفت و گیرندههای GNSS از از دست دادن سیگنال در محیطهای خاص رنج میبرند. در تئوری، بررسی مسیرها و استفاده از کیلومتر شماری برای نظارت بر موقعیت خطی قطار بر روی آنها برای تعیین مکان آن کافی است. اسکلتون گفت، با این حال، در عمل، رمزگذار چرخها «مستعد خطا هستند، زیرا چرخها در معرض لغزش و لغزش زیادی هستند». بنابراین، ما به حسگرهای کاملا مستقل نیاز داریم.
این الزام باعث شد که ALSTOM توسعه دستگاه ورودی IGLOO (مخفف IMU & GNSS وسیله نقلیه کیلومتر شماری) را پیشنهاد دهد که تمام سنسورهای مختلف را یکپارچه می کند. Logiplus سخت افزار را طراحی و تولید کرد، در حالی که M3 Systems الگوریتم را نوشت.
این پروژه که تا حدی به لطف کمک مالی از صندوق توسعه منطقه ای اروپا و با حمایت منطقه والون بلژیک تامین شد، به سه بخش تقسیم شد:
نرم افزاری برای جفت کردن IMU و GNSS برای محاسبه سرعت قطار.
راه حل کالیبراسیون خودکار، که نیاز به کالیبراسیون خودکار هنگام راه اندازی سنسور را از بین می برد.
یک پلت فرم سخت افزاری که دارای یک IMU کم هزینه است.
کنسرسیوم بسته به قابلیت اطمینان در هر منطقه از سیگنالهای GNSS، سه نوع منطقه را تعریف میکند که قطار در آنها فعالیت میکند. اسکلتون گفت: «به عنوان مثال، محیطی با دید واضح به آسمان و بدون هیچ مانعی قابل اعتماد است، در حالی که یک جنگل، یک دره شهری یا ورودی به یک تونل قابل اعتماد نیست. بدون پشتیبانی GNSS، در نهایت IMU نیز غیرقابل اعتماد خواهد شد.
در سرعت های بسیار پایین، خطاها باید بسیار کم باشد، اما در سرعت های بالاتر خطای سرعت بیشتر مجاز است. اپراتورها می توانند سطوح مختلف داده را از یک گیرنده GNSS استخراج کنند. برای دستیابی به یک جفت محکم GNSS-INS، آنها می توانند از تاخیرهای داپلر استفاده کنند و آنها را با IMU هیبرید کنند یا از حلقه ردیابی استفاده کنند و محدوده و داپلر را تنظیم کنند.
برای اتصال شل، آنها می توانند مستقیماً از موقعیت یابی، سرعت و داده های زمان بندی گیرنده GNSS استفاده کنند. تمام کوپلینگ ها با استفاده از فیلترهای بیزی، به عنوان مثال فیلتر کالمن انجام می شود. اسکلتون گفت: «کوپلینگ شل دقت، قابلیت اطمینان و یکپارچگی کمتری به شما میدهد، اما همچنین از CPU کمتری استفاده میکند».
برای جمعآوری دادهها در قطار، M3 Systems یک برد مدار چاپی (PCB) با یک گیرنده GNSS u-blox، یک گیرنده GNSS Sepentrio Asterix، نه IMU (که آنها را قادر میسازد بهترین مورد را برای مورد استفاده انتخاب کنند)، یک مرجع تولید کرد.
واحد مسیری که حقیقت زمین را فراهم می کند و رایانه ای که داده ها را از گیرنده های GNSS و IMU می گیرد. اسکلتون گفت: “همه چیز برای اهداف اندازه گیری در یک قفسه قطاری که در اینجا در بلژیک حرکت می کند یکپارچه شده بود.” و همه داده ها به طور خودکار از طریق اتصال اینترنت 4G بازیابی شدند. ما چند هزار کیلومتر سفر، چند ساعت تونل و سیگنال های GNSS قابل اعتماد و غیرقابل اعتماد را جمع آوری کرده ایم.
Logiplus شریک M3 Systems این محصول را برای پشتیبانی از نرم افزار هیبریداسیون و رابط با کامپیوتر حیاتی اروپا (EVC) طراحی کرده است که حداکثر سرعت و منحنی ترمز قطار را نظارت و به طور مداوم محاسبه می کند. اسکلتون گفت: “برای EVC ضروری است که دانش کاملی از سرعت قطار داشته باشد، که دلیل اصلی طراحی این دستگاه جدید است.
” آنچه در این سخت افزار مشخص است، قدرت محاسباتی، دو سیستم (GNSS و اینرسی) و الگوریتم ترکیب داده ها است که به سخت افزار اجازه تکامل می دهد. به عنوان مثال، ما می توانیم به یک IMU متفاوت تغییر دهیم.
اسکلتون خاطرنشان کرد: سیستم IGLOO با الزامات ایمنی مشخص شده مطابقت دارد و به دانش قابل اطمینان تر از سرعت قطار کمک می کند که خطر تصادفات و تلفات را کاهش می دهد، جریان ترافیک را بهبود می بخشد و کارایی و ایمنی عملیات قطار را بهبود می بخشد.
نقشه برداری راه آهن
سیستم های موقعیت یابی Eos
یک تونل ریلی در Leigh-on-Sea در شرق انگلستان. Arcadis از گیرندههای Eos Arrow 100 GNSS در کنار ArcGIS Survey123 Esri برای جمعآوری داراییهای راه آهن با دقت زیرمتر در زمان واقعی استفاده کرد. (تصویر: آمارو)
Network Rail که مالک و مدیریت زیرساختهای راهآهن در انگلستان، اسکاتلند و ولز است، نیاز به بررسی دقیق از 50000 دارایی الکتریکی در امتداد 400 مایل ریل در منطقه شرقی کشور داشت. به Arcadis، یک شرکت طراحی و مشاوره که متخصص در طراحی پایدار و خدمات مهندسی است، روی آورد.
این پروژه مستلزم ارائه طرحهای مدلسازی اطلاعات ساختمان (BIM) دقیق خط راهآهن برای پشتیبانی از عملیات و نگهداری زیرساختهای برقدار و در عین حال تضمین یک محیط کاری امن برای تیمهای نقشهبرداری بود. Arcadis با استفاده از گیرندههای Arrow 100 GNSS از سازنده کانادایی Eos Positioning Systems و ArcGIS Survey123 و نرمافزار ArcGIS Hub Esri، توانست دادهها را با دقت زیرمتر بهطور کارآمد جمعآوری کند و آنها را در زمان واقعی با Network Rail به اشتراک بگذارد.
گیدئون سیمونز، معاون مدیر GIS و مشاور جغرافیایی در Arcadis گفت که Arcadis تصمیم گرفت برای جمع آوری داده ها و استفاده از GIS برای مدیریت آن یک بررسی میدانی دیجیتال انجام دهد . ما به تیمهای نظرسنجی آیپد، اپلیکیشن Esri و گیرندههای GNSS ارائه کردیم.» برای اصلاحات، از شبکه سیستم عامل Ordnance Survey استفاده کرد. ما از طریق چند ارزیابی و آزمایش دریافتیم که دقت Eos Arrow به اندازه کافی برای برآوردن نیازهای پروژه خوب است.
منطقه مورد بررسی بیشتر روستایی است اما خط راه آهن از مناطق بسیار شهری عبور می کند. یکی از اولین چالشها، نقشه برداری زیر پوشش در ایستگاهها و در چند تونل بود. بنابراین، ما روشهایی را با استفاده از نقشهها و تصاویر جغرافیایی ارجاع داده شده و گرفتن دادههای موقت با استفاده از GNSS در خارج از تونلها، برای اندازهگیری فاصله و افست به داراییهای موجود در تونلها با چرخهای اندازهگیری که امکان پردازش پس از بررسی و دقت مکان مورد نیاز را فراهم میکند، توسعه دادیم. .
عکاسی نیز کلید موفقیت این پروژه بود. سیمونز گفت: «فقط در یک انبار، هزاران دارایی را با تعداد زیادی سوله قطار بررسی کردیم. ما از دوربینهای 360 درجه و دوربینهای دید قطار استفاده میکنیم، به طوری که واقعاً درک میکنیم که داراییها باید در کجا قرار گیرند.»
سیمونز خاطرنشان کرد: مرحله بعدی Network Rail حفظ آن تجهیزات است – چه جایگزین کردن آن، ارتقای آن به کد یا نصب بالقوه دارایی های جدید. در بریتانیا، ما از انواع اندازهگیریها استفاده میکنیم – امپریال و متریک. بنابراین، برای مشتری بسیار مفید بوده است که فقط یک منبع مرجع حقیقت داشته باشد که از کار او پشتیبانی میکند و همچنان میتواند با سیستمهای دیگر مرتبط باشد و ارتباط با تیمهای گستردهتر را آسان کند.»
خلاصه ای از محصولات اخیر در صنعت GNSS و موقعیت یابی اینرسی از شماره نوامبر 2023 مجله GPS World .
MEMS IMU مناسب برای محیط های ناهموار
واحد اندازه گیری اینرسی TAC-440 MEMS (IMU) برای محیط های سخت، بحرانی و سخت در طیف گسترده ای از کاربردهای دفاعی، تجاری، صنعتی و دریایی طراحی شده است. TAC-440 دارای بایاس ژیروسکوپی 1 درجه در ساعت و پایداری بایاس شتاب سنج 1 میلی گرمی با زاویه 0.05 درجه در ساعت در محدوده دمایی گسترده است.
EMCORE بیان کرد که حسگرهای کوارتز حالت جامد و ساختار IMU مهر و موم شده، MTBF قابل اعتماد و عمر ذخیره سازی را فراهم می کنند. TAC-440 از چهار روش همگام سازی پیام داده با قابلیت پالس همگام سازی ورودی یا قابلیت اعتبار زمان خروجی پشتیبانی می کند. کاربر می تواند انتخاب کند که آیا پالس همگام سازی به صورت داخلی تولید و به عنوان زمان اعتبار داده های خروجی خروجی شود یا اینکه نرم افزار TAC-440 ورودی پالس همگام سازی را شناسایی کرده و داده های خروجی را با پالس ورودی همگام می کند. EMCORE Corporation ، emcore.com
تبلت RTK GNSS یک دستگاه مقاوم طراحی شده برای عملیات جغرافیایی و نقشه برداری در این زمینه
LT800H عملکرد قوی در فضای باز، امنیت داده ها و دقت در سطح سانتی متر را برای برنامه های مختلف، از جمله ساخت و ساز، بررسی محیط زیست و هر صنعتی که در آن تبلت های اندرویدی استفاده می شود، به کاربران ارائه می دهد. تبلت اندرویدی LT800H RTK با عملکرد بالا 1408 کانال GPS، GLONASS، Galileo و ماژول BeiDou و یک آنتن مارپیچ ردیابی GNSS، دقت موقعیت یابی سانتی متر به دسی متر را در محیط های چالش برانگیز ارائه می دهد.
همچنین به یک مودم 4G برای ساده سازی اتصال به اصلاحات شبکه GNSS RTK مجهز شده است. این فناوری همچنین عمر باتری هشت ساعته را ارائه می دهد و به کاربران امکان می دهد بدون وقفه داده ها را در میدان جمع آوری کنند. ناوبری CHC ، chcnav.com
نرم افزار PPK برای نقشه برداری زمین، هیدروگرافی، بررسی های هوایی، ساخت و ساز و کاربردهایی که نیاز به موقعیت یابی دقیق دارند.
Qinertia 4 دارای یک موتور ژئودزی پیشرفته است که دارای مجموعه گسترده ای از سیستم های مرجع مختصات از پیش تنظیم شده (CRS) و تبدیل است، که آن را به یک راه حل مناسب برای برنامه هایی تبدیل می کند که از داده های ژئودزی متنوع استفاده می کنند. برای مقابله با چالشهای فعالیت یونوسفر متغیر، Qinertia 4 دارای یک حالت سینماتیک پس پردازش Ionoshield (PPK) است. این ویژگی شرایط یونوسفر و فواصل پایه را جبران میکند و کاربران را قادر میسازد تا PPK را حتی برای خطوط پایه طولانی و/یا شرایط سخت یونوسفر انجام دهند.
این اطمینان حاصل می کند که نقشه برداران می توانند حتی در مناطقی با اختلالات یونوسفر غیرقابل پیش بینی به دقت سانتی متر دست یابند. یکی دیگر از موارد افزوده شده به Qinertia 4 پشتیبانی شبکه گسترده برای ایستگاه های مرجع دائمی (CORS) است. این ویژگی به کاربران امکان دسترسی به شبکه ای از 5000 SmartNet CORS را برای پردازش داده های GNSS قابل اعتماد می دهد. این ایستگاههای پایه به شبکه ایستگاههای پایه که مستقیماً در Qinertia در دسترس هستند اضافه میشوند و تعداد آنها را به بیش از 10000 پایگاه در 164 کشور میرسانند.
برای دادههایی که نمیتوانند با استفاده از PPK پردازش شوند، Qinertia 4 یک راهحل جایگزین با الگوریتم موقعیتیابی نقطه دقیق خود ارائه میدهد. این حالت پردازشی جدید که برای تمامی کاربران دارای تعمیر و نگهداری فعال Qinertia در دسترس است، پس پردازش را در هر نقطه از جهان بدون ایستگاه پایه با دقت افقی 4 سانتی متر و دقت عمودی 8 سانتی متر فراهم می کند. SBG Systems ، sbg-systems.com
سیستم هوابرد Lidar + RGB برای بهبود جزئیات عملیات نقشه برداری هوایی طراحی شده است
AlphaAir 10 (AA10) دارای یک الگوریتم ناوبری با دقت بالا است که دقت برد مکرر 5 میلی متری را فراهم می کند و در محدوده 2 تا 5 سانتی متری، حتی در محیط های پیچیده، به دقت مطلق دست می یابد. AA10 قادر به اندازه گیری های دوربرد تا 800 متر، اسکن سریع با سرعت 500000 نقطه در ثانیه است و دارای آینه ای است که به طور مداوم می چرخد که سرعت اسکن 250 اسکن در ثانیه را امکان پذیر می کند.
AA10 با تولید ابرهای نقطه ای با کیفیت بالا، ایجاد مدل های مش را امکان پذیر می کند. این دوربین از یک دوربین داخلی املایی 45 مگاپیکسلی پشتیبانی می کند که بافت های نقشه برداری تصویر با وضوح بالا را برای بازسازی مدل سه بعدی با رنگ آمیزی ابر نقطه ای واقعی ارائه می دهد. AA10 همچنین از ضبط خودکار واقعیت و تجسم داده در زمان واقعی که مستقیماً از کنترل کننده پهپاد قابل دسترسی است پشتیبانی می کند.
سیستم لیدار AA10 سبک و جمع و جور است و 1.55 کیلوگرم وزن دارد و در صورت ادغام با پهپادهایی مانند DJI M350، زمان عملیاتی 30 دقیقه ای را فراهم می کند. این سیستم همچنین دارای استاندارد IP64 است. ناوبری CHC ، chcnav.com
گیرنده GNSS برای پروژه های نظرسنجی طراحی شده است
Reach RS3 یک گیرنده GNSS است که دارای جبران شیب واحد اندازه گیری اینرسی (IMU) و یک رادیو دو بانده برای سازگاری بیشتر با گیرنده های شخص ثالث است. Reach RS3 به کاربران امکان می دهد در زوایای شیب بزرگ نظرسنجی کنند و در عین حال دقت درجه نظرسنجی را حفظ کنند. گیرنده چند باندی هم به عنوان پایه و هم به عنوان مریخ نورد کار می کند و به صورت کارخانه ای کالیبره شده است.
گیرنده گزینه های همه کاره ای را برای دریافت تصحیحات از ایستگاه های مرجع (CORS)، دستگاه Reach دیگر، یا یک پایگاه شخص ثالث ارائه می دهد، بنابراین کاربران می توانند گیرنده های حرکتی-زمان واقعی (RTK) را در یک ناوگان ترکیب و مطابقت دهند. اتصال NTRIP آن اصلاحات را از CORS، سرویس NTRIP یا گیرنده GNSS با استفاده از Emlid NTRIP Caster امکان پذیر می کند. هنگامی که از طریق NTRIP متصل می شود، Reach روی خط پایه بیش از 60 کیلومتر در RTK و 100 کیلومتر در کینماتیک پس از پردازش کار می کند. Emlid ، emlid.com
گیرنده GNSS شامل Trimble ProPoint است و دقت نظرسنجی و بهره وری را در این زمینه ارائه می دهد.
گیرنده R580 GNSS متخصصان نقشه برداری، نقشه برداری و GIS، ساخت و سازهای عمرانی و خدمات شهری را قادر می سازد موقعیت یابی در سطح سانتی متری را ثبت کنند.
با تعبیه موتور Trimble ProPoint GNSS، کاربران می توانند نقاط را در محیط های چالش برانگیز، مانند زیر سایه بان درختان یا نزدیک ساختمان ها اندازه گیری کنند، در حالی که فناوری EVEREST Plus می تواند سیگنال های چند مسیری ناخواسته را برای بهبود دقت و اطمینان داده ها شناسایی و حذف کند. گیرنده با استفاده از فناوری چیپست Maxwell 7، پردازش سریع، قابلیت ضد جعل و توانایی ردیابی تمام صورت فلکی GNSS موجود را فراهم می کند.
R580 از خدمات تصحیح Trimble RTX برای دقت در سطح RTK بدون استفاده از ایستگاه پایه محلی یا شبکه VRS در هر جایی که منابع تصحیح در دسترس هستند، پشتیبانی می کند. گیرنده را می توان با همه دستگاه های تلفن همراه فعلی در انواع سیستم عامل ها و پلتفرم ها جفت کرد – از یک دستی یا کنترلر Trimble گرفته تا یک تلفن هوشمند یا تبلت مدرن. همچنین می توان آن را روی میله، وسیله نقلیه یا کوله پشتی نصب کرد. Trimble , trimble.com
OEM
ماژول GNSS از باندهای GNSS L1/L5 از چند صورت فلکی، از جمله NavIC پشتیبانی می کند.
ماژول موقعیت یابی NEO-F10N بر اساس فرم فاکتور u-blox NEO و مجهز به فناوری GNSS دو بانده u-blox F10 است. NEO-F10N از باندهای L1/L5 GNSS از چند صورت فلکی – از جمله NavIC – برای ارائه دقت موقعیت در سطح متر در مناطق شهری پشتیبانی می کند. سفتافزار آن برای پشتیبانی از چندین برنامه کاربردی مانند بازارهای تلهماتیک و میکروموبیلاتی خودرو یا برنامههای صنعتی که به دقت موقعیت در سطح متر نیاز دارند، قابل ارتقا و تنظیم است.
NEO-F10N با افزایش انعطاف پذیری خود در برابر تداخل چند مسیره، دقت موقعیت را در محیط های شهری بهبود می بخشد. این ماژول با استفاده از سیگنال های هر دو باند L1 و L5 به دقت بهتری نسبت به استفاده از باند L1 به تنهایی دست می یابد. کاربرانی که در حال حاضر از گیرنده های مبتنی بر ماژول هایی مانند u-blox NEO-M8 و NEO-M9 استفاده می کنند، می توانند به نسل جدید NEO-F10N مهاجرت کنند. این ماژول دقت را افزایش میدهد، مصرف انرژی را کاهش میدهد و راهحلی جایگزین برای کاربرانی که نمیخواهند تنظیمات حسابداری مرده را اجرا کنند، ارائه میدهد. u-blox، u-blox.com
آنتن GNSS چند باند طراحی شده برای بهبود راه حل های موقعیت یابی در سطح متر
ANN-MB5 یک آنتن GNSS چند بانده (L1/L5/E5a/B2a) است که برای پلت فرم u-blox F10 بهینه شده است و موقعیت دقیق، قابل اعتماد و قوی را حتی در محیط های چالش برانگیز امکان پذیر می کند. این آنتن دارای دریافت همزمان چندین سیستم ناوبری از جمله NavIC است. ANN-MB5 دارای طراحی فشرده با پایه مغناطیسی است. u-blox ، u-blox.com
INS محصولی برای نقشه برداری تلفن همراه، استقلال، و موارد دیگر
سیستم ناوبری اینرسی xRED3000 (INS) پشتیبانی از GNSS چهار صورت فلکی را برای چندین برنامه ارائه می دهد. وزن INS 20 گرم است که آن را برای محموله های هوایی مناسب می کند. در ابعاد 53.6 میلی متر در 50.6 میلی متر در 9.5 میلی متر، می توان آن را بدون تغییر اساسی در طراحی کاربر گنجاند. هنگامی که در یک منطقه محروم از GNSS، xRED3000 دقت موقعیت 0.5 متر را حتی پس از 60 ثانیه ارائه می دهد.
این ویژگی دارای الگوریتمهای جفت محکم gx/ix است که دقت را در درههای شهری بهبود میبخشد و پس از قطعهای موقت GNSS سرعت بازیابی سینماتیک در زمان واقعی را افزایش میدهد. xRED3000 دارای صفحه کیلومتری اینرسی لیدار است که داده ها را از لیدار در پس پردازش می گیرد تا دریفت واحد اندازه گیری اینرسی را کاهش دهد و دقت را در مناطقی با سیگنال GNSS ضعیف یا بدون سیگنال بهبود بخشد. علاوه بر این، NTRIP تعبیه شده دریافت تصحیحات GNSS را آسان تر می کند. OxTS ، oxts.com
گیرنده سه فرکانس GNSS کامل با طراحی فشرده برای برنامه های موبایل
BD990 از فرکانس سه گانه برای صورت فلکی GPS، GLONASS، BeiDou و Galileo پشتیبانی می کند. گیرنده برای تعیین موقعیت سانتی متری، مقداردهی اولیه سینماتیک (RTK) سریع و قابل اعتماد را ارائه می دهد. دارای فناوری Trimble Maxwell 7 است که 336 کانال ردیابی، کاهش چند مسیری Trimble Everest Plus و نظارت و تجزیه و تحلیل طیف RF پیشرفته را ارائه می دهد.
با گزینه استفاده از خدمات OmniSTAR یا RTX، BD990 سطوح مختلفی از عملکرد را تا سطح سانتی متر بدون استفاده از ایستگاه پایه ارائه می دهد. BD992 همچنین از عنوان GNSS دو آنتن پشتیبانی می کند در حالی که BD992-INS از موقعیت و جهت گیری با نرخ به روز رسانی بالا پشتیبانی می کند. Trimble ، oemgnss.trimble.com
کنترل ماشین
سیستم فرمان خودکار برای کاربردهای کشاورزی دقیق طراحی شده است
سیستم فرمان خودکار SAgro150 با هدف ارائه راه آسان به کشاورزان برای شروع کار با فرمان خودکار است. با قابلیت ردیابی تمام صورت فلکی، SAgro150 دقت فرمان خودکار 2.5 ± سانتی متری را برای به حداکثر رساندن استفاده از زمین و عملکرد و در عین حال صرفه جویی در منابعی مانند آب و کود دریافت می کند. در مقایسه با نسل اول سیستم SAgro100، سیستم فرمان خودکار SAgro150 از یک راه حل تک آنتن به جای راه حل دو آنتن استفاده می کند.
همچنین دارای گزینههای یکپارچهسازی سادهتر است، فقط به یک چاک مغناطیسی قوی برای اتصال ایمن آنتن به بالای تراکتور برای ردیابی سیگنال ماهوارهای نیاز دارد. سیستم جدید همچنین از حالت ژیروسکوپ دوگانه استفاده می کند که قابلیت اطمینان داده های عنوان و سازگاری با تراکتورهای مختلف را افزایش می دهد. این سیستم جدید به کاربردهایی مانند خاکورزی دوار، لجن کشی، کاشت و برداشت در خط مستقیم، منحنی، دور برگردان و غیره کمک می کند. SingularXYZ , singularxyz.com
گیرنده تعیین موقعیت و عنوان برای چندین برنامه طراحی شده است
AsteRx SB3 Pro+ یک گیرنده GNSS چند فرکانسی است که از فناوری GNSS سه باند برای موقعیتیابی سینماتیک (RTK) قابل اعتماد در سطح سانتیمتری و عنوان زیر درجه استفاده میکند. با انعطاف پذیری برای استفاده به عنوان مریخ نورد یا ایستگاه پایه، AsteRx SB3 Pro+ همچنین دارای نرخ به روز رسانی فوق العاده بالا و عملکرد ثبت گزارش است. این دستگاه که در یک محفظه مقاوم IP68 قرار دارد، برای محیط های سخت مناسب است. AsteRx SB3 Pro+ دارای نرخ به روز رسانی بالا و تاخیر کم برای وسایل نقلیه سریع یا قطعات ماشین آلات است. Septentrio ، septentrio.com
آنتن های GPS ناوبری و ردیابی پیشرفته ای را برای برنامه های خودرو ارائه می دهد
آنتنهای جیپیاس خودرو KP Performance مجهز به بهره 28 دسیبل هستند تا سیگنالهای ضعیف را حتی در چالشبرانگیزترین محیطها ضبط کنند. آنتن ها همچنین دارای قابلیت رد خارج از باند بالا هستند. با به حداقل رساندن تداخل سیگنال و اثرات چند مسیری، آنتن ها کیفیت و ثبات سیگنال خوبی را ارائه می دهند. ویژگیهای آنتنها، ناوبری دقیقتر و بهبود تجربههای کاربری را برای وسایل نقلیه شخصی، ناوگان تجاری یا سیستمهای مستقل امکانپذیر میسازد. آنتن ها دارای طراحی ضد آب و ضد گرد و غبار با استاندارد IPX6 یا IP66 برای عملکرد مطمئن در شرایط سخت هستند. KP Performance ، kpperformance.com
Skydio وارد یک همکاری استراتژیک با Trimble شده است تا یک گردش کار یکپارچه از ضبط دقیق داده ها، تجسم و تجزیه و تحلیل ایجاد کند. گردش کار برای رفع نیازهای صنایع زیرساختی حیاتی مانند نقشه برداری، نقشه برداری و بازرسی طراحی شده است.
پهپاد X10 شرکت Skydio. (تصویر: Skydio)
هدف این همکاری که در حال حاضر در مرحله توسعه است، با ادغام پهپادهای خودران Skydio با گیرندهها و نرمافزار Trimble GNSS، دقتی در سطح سانتیمتری در نقشهبرداری و نقشهبرداری پروژهها به کاربران ارائه میکند. این فناوری میتواند توسط شرکتهای ساختمانی و تاسیساتی و همچنین آژانسهای حملونقل دولتی برای سادهسازی جریانهای کاری برای دقت بیشتر و کارایی پروژه مورد استفاده قرار گیرد.
رهبران صنعت به پهپادهای خودمختار با حسگرهای دوربین بصری و حرارتی قدرتمند، مانند Skydio’s X10 ، برای توانایی آنها در ثبت گزارشهای وضعیت بلادرنگ از شرایط زیرساختی حیاتی متکی هستند. با گرفتن تصاویر و دادههای مکانی زودهنگام و مکرر در طول پروژههای ساختوساز، سازمانها به راحتی میتوانند از مطابقت کار در محل با طراحی اطمینان حاصل کنند و دوباره کاری پرهزینه را کاهش دهند.
هنگامی که بازرسیهای پل یا سایت ابزار نیاز به مقیاسپذیری دارند، از ادغام Skydio و Trimble میتوان برای جمعآوری دادههای جامع و بهبود گردش کار لازم برای شناسایی زودهنگام مسائل و اقدام برای جلوگیری از خرابی استفاده کرد.
طبق گفته Skydio، مزایای کلیدی این همکاری عبارتند از:
ادغام خودکار داده ها : یک ادغام خودکار مبتنی بر API، انتقال یکپارچه تصاویر هوایی و ابرداده را از Skydio Cloud به Trimble Industry Cloud امکان پذیر می کند. این تبدیل داده های ثبت واقعیت را به بینش های عملی برای بهبود کارایی سرعت می بخشد. پالایش و تجزیه و تحلیل بیشتر داده های خروجی را می توان در محیط های نقشه برداری و نقشه برداری حرفه ای مانند مرکز تجاری Trimble (TBC) انجام داد.
دقت نظرسنجی با Skydio X10: پهپاد X10 به طور کامل با گیرندههای GNSS Trimble سازگار خواهد بود و به کاربران متقابل امکان میدهد هنگام استفاده از Skydio در کنار ایستگاههای پایه Trimble و گیرندههای GNSS، به دقت نظرسنجی در مأموریتهای نقشهبرداری دست یابند. فراتر از RTK، کاربران همچنین می توانند اصلاحات مبتنی بر PPK را پس از پرواز انجام دهند.
سیگنالهای سیستمهای ماهوارهای ناوبری جهانی (GNSS) که در ابتدا برای کاربردهای ناوبری و زمانبندی توسعه یافته بودند، اکنون معمولاً برای کاربردهای سنجش از دور ژئوفیزیکی، از جمله مشاهده سطح و جو زمین با استفاده از ایستگاههای زمینی نزدیک سطح دریا و همچنین سکوهای بالای کوه، هوابرد و فضابرد استفاده میشوند. . بازتاب سنجی GNSS (به اختصار GNSS-R)، که تکنیک استفاده از سیگنال های بازتابی برای اندازه گیری ویژگی های سطح زمین است، یک حوزه تحقیقاتی و کاربردی در حال رشد برای سنجش از دور GNSS بوده است.
نکته قابل توجه، ماموریت ماهوارهای Cyclone Global Navigation Satellite System (CYGNSS) نقشههای تاخیری داپلر (DDM) را تولید میکند که برای نظارت بر سرعت باد سطح اقیانوس در طول طوفانها استفاده میشود. در همین حال، GNSS-R زمینی و هوابرد برای نظارت بر رطوبت خاک، عمق برف و رشد پوشش گیاهی استفاده شده است.
یکی از حوزههای مورد علاقه، بازتابسنجی دقیق با استفاده از اندازهگیریهای فاز حامل سیگنال است. اولین تلاش برای انجام ارتفاعسنجی دقیق (فاز) بر روی یخ دریا با استفاده از اندازهگیریهای بازتاب سنجی GPS از TechDemoSat-1 در مدار پایین زمین توسط محققان در سال 2017 گزارش شد. متعاقبا، محققان استفاده از بازتابهای جمعآوریشده توسط یک ماهواره Spire را برای انجام ارتفاعسنجی بر روی زمین نشان دادند.
خلیج هادسون و دریای جاوا و نحوه استفاده از بازتاب یخ در نواحی قطبی برای اندازهگیری محتوای کل الکترون یونوسفر روی کلاهکهای قطبی. در حالی که این تظاهرات GNSS-R برای بازتاب سنجی مبتنی بر فاز حامل دقیق امیدوارکننده است، کار بیشتری باید انجام شود تا مشخص شود که ارتفاع سنجی مبتنی بر حامل چه زمانی امکان پذیر است و با چه چالش هایی مواجه است.
برای مطالعه چالشهای مرتبط با پردازش سیگنالهای اختفای رادیویی منعکسشده و با زاویه ارتفاع پایین، آزمایشگاه ناوبری و حسگر ماهوارهای بولدر دانشگاه کلرادو (CU) یک سایت جمعآوری دادههای GNSS را در بالای کوه هالیکالا در جزیره مستقر کرده است. مائوئی ، هاوایی کمپینهای مجموعه اخیر با هدف استفاده از این سایت به عنوان یک بستر آزمایشی برای الگوریتمهای GNSS-R که از اندازهگیریهای چند فرکانس و چند قطبی استفاده میکنند.
پیش از این، ما پردازش نقشه تاخیری را برای قطبش های دایره ای چپ (LHC) و دایره ای راست (RHC) برای سیگنال های GPS L1 و L2 انجام دادیم. این نتایج روش شناسی پردازش حلقه باز را تأیید می کند و یک ارزیابی اولیه از کیفیت داده ها را ارائه می دهد. مشاهده کردیم که سیگنالهای منعکسشده دریافتی، محو شدن عمیق و سریع دامنه را نشان میدهند. در کار گزارششده در این مقاله، ارزیابی خود را به سیگنالهای GPS با فرکانس سهگانه (L1CA، L2C، L5Q) گسترش میدهیم و روششناسی خود را برای استخراج فاز حامل سیگنال مستند میکنیم.
نتایج اولیه ما نشان میدهد که استخراج فاز سیگنال منسجم چالش برانگیز است و ممکن است برای این تنظیم آزمایشی خاص امکانپذیر نباشد. ما در مورد روشهایی بحث میکنیم که در آن آزمایش ممکن است برای به دست آوردن بازتابهای سطح اقیانوس منسجم در آینده بهبود یابد.
پیشینه آزمایش
شکل کنونی آزمایش CU SeNSe Lab Mount Haleakalā GNSS در ژوئن 2020 به کار گرفته شد. این آزمایش از یک آنتن شیپوری با قطبش دو طرفه تشکیل شده است که در پانل سمت چپ شکل 1 به همراه یک آنتن مرجع رو به اوج نشان داده شده است . . سیگنالهای باند پهن افقی و عمودی پلاریزه شده از آنتن شاخ به سختافزار جلویی وارد میشوند و با استفاده از ترکیبکنندههای فاز 90 درجه ترکیب میشوند تا سیگنالهای پلاریزه LHC و RHC را تشکیل دهند که سپس توسط مجموعهای از تجهیزات جانبی رادیویی نرمافزار جهانی Ettus ضبط میشوند. (USRPs). در همین حال، سیگنال آنتن مرجع به گیرنده Sepentrio PolaRxS ارسال می شود .
پانل سمت راست در شکل 1 تنظیمات سیستم را نشان می دهد. توجه داشته باشید که نوسان ساز کریستالی کنترل شده توسط اجاق Sepentrio برای هدایت USRP ها استفاده می شود. این به ما اجازه می دهد تا از خروجی های Sepentrio برای تخمین تغییرات ساعت گیرنده استفاده کنیم و از آنها در جزء ساعت گیرنده مدل های حلقه باز خود استفاده کنیم که در زیر به آن می پردازیم.
شکل 1 : آنتن شیپوری رو به پهلو در محفظه رادوم آن (پانل سمت چپ) و بلوک دیاگرام سخت افزاری سیستم جمع آوری داده ها (پانل سمت راست). (همه ارقام ارائه شده توسط نویسندگان)
هر USRP میتواند تا چهار سیگنال را در دو فرکانس مخلوط کردن مختلف ضبط کند که امکان ضبط سیگنالهای پلاریزه RHC و LHC را در حداکثر چهار باند مختلف فراهم میکند. اولین USRP باندهای L1 و L2 را با فرکانس مرکزی به ترتیب در 1575.42 و 1227.6 مگاهرتز در پهنای باند 5 مگاهرتز ضبط می کند. USRP دوم باندهای L5 و E6/B3 را در فرکانسهای مرکزی 1176.45 و 1271.25 مگاهرتز و در پهنای باند 20 مگاهرتز ضبط میکند.
جدول 1 شناسه های هر کانال دریافتی را به همراه باند مربوطه، قطبش و نرخ نمونه برداری فهرست می کند. توجه داشته باشید که سیگنالهای ضبطشده که باند E6 را پوشش میدهند، سیگنالهای BeiDou B3 را نیز دریافت میکنند، اما ما در این مقاله تحلیل خود را به سیگنالهای GPS L1، L2 و L5 محدود میکنیم. نمونه های این USRP ها به همراه خروجی Sepentrio Binary Format (SBF) گیرنده PolaRxS روی دیسک نوشته می شوند.
جدول 1 : شناسه گیرنده با باند و قطبش مربوطه.
از ژوئن 2021، مجموعههای دورهای به مدت حدوداً یک ساعت در یک زمان گرفته شد، که تقریباً مدت زمانی است که برای عبور یک ماهواره GPS از زاویه ارتفاع 0 درجه به یکی از بیش از 20 درجه طول میکشد. زمانهای جمعآوری برای هدف قرار دادن گذرگاههای ماهوارهای تنظیم شد که نقطه انعکاس آنها از محدوده آزیموتال آنتن شاخ، که تقریباً رو به جنوب است و دارای عرض پرتو حدود 60 درجه است، عبور میکند.
شکل 2 مجموعه داده های موجود را از ماه اول مجموعه ها خلاصه می کند. سمت راست ترین پانل های شکل 3 نمونه هایی از مسیر کاوشگر GPS PRN 6 را نشان می دهد که در 13 ژوئن 2022 در افق در حدود ساعت 12:00-13:00 UT قرار می گیرد. این مسیری است که ما در این کار روی آن تمرکز میکنیم، زیرا PRN 6 سیگنالهای L1CA، L2C و L5 را منتقل میکند و به طور مداوم یک نقطه خاص در منطقه مورد علاقه ما دارد.
شکل 2: داده های موجود در طول ماه اول جمع آوری. میانگین ارتفاع موج قابل توجه در منطقه جنوب هالیکالا نیز ترسیم شده است. اعداد نزدیک به پایین مجموعه داده های تحلیل شده برای این مقاله را نشان می دهد.
روش
روش پردازش ما برای ردیابی حلقه باز سیگنالهای GNSS منعکسشده بر اساس کار قبلی ما است که در آن ما DDM و نقشههای تاخیر اندازهگیری نسبت سیگنال به نویز (SNR) برای فرکانسهای سیگنال چندگانه و قطبشهای دریافتی تولید کردیم.
مدل شبه رنگ. ما با تولید مدلی از شبه برای سیگنال مستقیم و منعکس شده شروع می کنیم. مدل فقط باید تا سطح تراشه دقیق باشد، زیرا ما بین چندین تراشه تاخیر برای سیگنال های دریافتی همبستگی داریم. تنظیم یک نیاز دلخواه دقت 0.5 تراشه (معادل تاخیر در حدود 150 متر برای L1CA/L2C یا 15 متر برای سیگنال های L5)، به ما اجازه می دهد تا تاخیرهای مسیر از یونوسفر و تروپوسفر را نادیده بگیریم، که فقط باید چندین مورد را به حساب آورد.
متر تاخیر مدل دارای سه عبارت است که ما نسبت به زمان سیستم GPS (GPST) تخمین می زنیم: خطای ساعت گیرنده، خطای ساعت فرستنده ماهواره و محدوده هندسی.
ما از موقعیت بررسی شده آنتن بوق همراه با محصولات مدار و ساعت دقیق سرویس بین المللی GNSS برای خطای ساعت و موقعیت فرستنده استفاده می کنیم. اینها به ما اجازه می دهند تا خطای ساعت فرستنده و تاخیر مسیر را برای سیگنال مستقیم محاسبه کنیم. تأخیر مسیر سیگنال منعکس شده را می توان با محاسبه نقطه انعکاس چشمی در بیضی WGS84 و افزودن فواصل فرستنده به نقطه چشمی و نقطه چشمی به گیرنده پیدا کرد.
مدت باقی مانده برای تخمین خطای ساعت گیرنده است. به یاد بیاورید که USRP های ما توسط نوسانگر داخلی Sepentrio هدایت می شوند. بنابراین، خطای ساعت در اندازهگیریهای Sepentrio با تغییرات در نوسانگر مرجع برای USRPs همراه است.
ما از یک تکنیک کاهش روند ژئودتیکی برای تخمین این تغییرات ساعت و اعمال آنها در مدل شبه رنگ خود استفاده می کنیم. برای ساختن خطای ساعت کامل گیرنده، با ردیابی یک دقیقه از یک ماهواره قوی با زاویه ارتفاع متوسط و رمزگشایی اطلاعات زمانبندی آن، تراز زمانی نمونهها را در نزدیکی ابتدای مجموعهها به GPST تخمین میزنیم. این یک تخمین از GPST را در ابتدای فایل به ما می دهد، که می توانیم از آن برای ایجاد یک تخمین کامل از GPST در هر نمونه موجود در فایل استفاده کنیم. همچنین، با توجه به مدل شبه ما، میتوانیم فاز کد دریافتی و فرکانس داپلر را پیدا کنیم.
شکل 3: نمونه ای از نقشه های تاخیر از GPS PRN 6. پانل های سمت چپ، نقشه های تاخیر سیگنال های L1CA، L2C و L5، هر دو قطبش RHC و LHC را نشان می دهند. پانل پایینی زاویه ارتفاع مربوطه را در طول مدت عبور نشان می دهد. نقشههای سمت راست، موقعیت نقطهای خاص را در طول گذر، همراه با خطوطی از مدل WW3 برای ارتفاع موج قابل توجه و ارتفاع موج قابل توجه نشان میدهند.
همبستگی سیگنال با استفاده از فاز کد ایجاد شده و مدلهای داپلر، همبستگیهایی را برای سیگنالهای بازتابی و مستقیم ایجاد میکنیم. ما یک سیگنال مرجع را در هر بازه 1 میلیثانیهای به هم مرتبط میکنیم، و برای اهداف بررسی سلامت عقل، همبستگیهای بیش از 3 تراشه را در فاصله 0.5 تراشه محاسبه میکنیم.
این منجر به خروجی های همبستگی درون فازی و مربعی (I/Q) در هر 1 میلی ثانیه می شود. پانل های سمت چپ در شکل 3 نمونه هایی از سیگنال های منعکس شده پردازش شده برای سیگنال های قطبش RHC و LHC L1CA، L2C و L5Q از PRN 6 در 13 ژوئن 2021، ساعت 12:00-13:00 UT را نشان می دهند.
توجه داشته باشید که با تنظیم ماهواره، در حدود 4 درجه زاویه ارتفاع، سیگنال های منعکس شده با سیگنال مستقیم قوی تر در سیگنال های L1 و L2 ادغام می شوند. این اتفاق بعداً در L5 به دلیل پهنای باند بالاتر آن رخ می دهد. ما از تراشه 0.0 برای به دست آوردن خروجی های I/Q برای پردازش فاز حامل برای L1 و L2 استفاده می کنیم. برای L5، ما از تراشه 0.0، -0.5، یا -1.0 استفاده می کنیم تا عدم تطابق مدل را در انتهای فایل محاسبه کنیم.
محو شدن سیگنال و مدل اقیانوسی WW3. هدف نهایی آزمایش بازتاب سنجی Haleakalā مقایسه ویژگی های سیگنال های بازتابی پردازش شده با پارامترهای سطح اقیانوس در نزدیکی نقطه چشمی و منطقه درخشان است. برای این منظور، ما دادههایی را از مدل WaveWatcher 3 (WW3) منطقهای هاوایی ترکیب کردهایم. این مدل اطلاعاتی در مورد ارتفاع موج، جهت و دوره به دلیل باد و تورم خروجی می دهد و وضوحی در حدود 5 کیلومتر دارد. داده های این مدل در قالب NetCDF از چندین سرویس وب در دسترس است.
پانل سمت راست شکل 3 خطوط ارتفاع موج قابل توجه باد و موج را در منطقه هالیکالا جنوبی نشان می دهد. در همین حال، توجه داشته باشید که سیگنال های بازتاب شده (پانل های سمت چپ) تغییرپذیری بالایی در توان دریافتی در طول مدت زمان مجموعه نشان می دهند. در حالی که امیدوار بودیم بتوانیم فوراً همبستگی بین این پارامترهای موج و نوسانات توان را مشاهده کنیم، واضح است که برای از بین بردن چنین سیگنالی به پردازش بیشتری نیاز داریم، و تغییر هندسه ماهواره احتمالاً مشاهده و تأیید آن را دشوار خواهد کرد.
با این حال، نتایج ما در پایان این مقاله نشان خواهد داد که احتمالاً بین پارامترهای محو شدن و باد همبستگی وجود دارد، اگرچه تا چه حد ناشناخته است. در نهایت، توجه داشته باشید که قطبش های LHC (RX6، RX8، RX2) سیگنال های بازتابی بسیار قوی تری نسبت به قطبش های RHC نشان می دهند. از آنجایی که ما علاقه مند به پردازش فاز برای سیگنال های بازتابی هستیم، ما به طور انحصاری در مورد استفاده از سیگنال های پلاریزاسیون LHC در ادامه این مقاله گزارش می دهیم.
پردازش فاز حامل. پس از انجام همبستگیها، همبستگیهای I/Q را برای سیگنالهای مستقیم و منعکسشده میگیریم و آنها را پردازش میکنیم تا فاز سیگنال بازتابشده پاکشده را بازیابی کنیم. اولین سری از مراحل در این فرآیند شامل پردازش سیگنال مستقیم برای تعیین تراز نماد ناوبری / پوشش و تخمین هرگونه نوسانات فاز باقیمانده است که بیشتر به دلیل نوسانات ساعت گیرنده مدل نشده است. شکل 4 این فرآیند را برای سیگنال L1CA نشان می دهد. همبستگی های خام I/Q در پانل بالایی نشان داده شده است.
برای این موارد، ما یک حلقه قفل فاز Costas (PLL) برای ردیابی نوسانات فاز باقیمانده بدون حساس بودن به انتقال نمادهای ناوبری / پوشش اعمال می کنیم. در مرحله بعد، این نوسانات فاز باقیمانده را حذف می کنیم تا مقادیر I/Q کاهش یافته را بدست آوریم.
شکل 4: فرآیند پاکسازی داده I/Q برای سیگنال مستقیم L1CA.
همانطور که در پانل دوم نشان داده شده است، این مولفه های مربعی مقادیر I/Q کاهش یافته در مرکز صفر هستند در حالی که مولفه درون فاز اکنون بیت های داده / نمادهای همپوشانی را نشان می دهد. ما از مقادیر I/Q کاهش یافته برای تخمین توالی بیت های ناوبری در سیگنال های L1CA و L2C استفاده می کنیم.
به همین ترتیب، تراز توالی همپوشانی نویمان-هافمن را برای سیگنال L5 تخمین می زنیم. در نهایت، بیتهای داده تخمینی یا توالی همپوشانی را برای تأیید رویه پاک میکنیم. نتایج پاک کردن بیت های ناوبری تخمین زده شده برای سیگنال L1CA در پانل سوم شکل 4 نشان داده شده است.
پس از به دست آوردن نوسانات فاز باقیمانده و نمادهای ناوبری / همپوشانی برای سیگنال مستقیم، در مرحله بعدی آنها را برای تمیز کردن سیگنال منعکس شده اعمال می کنیم. به طور خاص، ما نوسانات فاز باقیمانده را از مقادیر I/Q سیگنال منعکس شده خام حذف میکنیم و سپس بیتهای ناوبری یا کد پوشش مربوطه را پاک میکنیم.
شکل 5 نمونه ای از داده های I/Q منعکس شده را قبل و بعد از این روش نشان می دهد. بیت های ناوبری به وضوح حذف می شوند، اما سیگنال بازتاب شده همچنان نوسانات نسبتاً قابل توجهی را در مقادیر I/Q پاک شده نشان می دهد. از این مقادیر است که امیدواریم فاز سیگنال منعکس شده باقیمانده را استخراج کنیم.
شکل 5: سیگنال منعکس شده خام I/Q (بالا) و I/Q پس از حذف و پاک کردن بیت های ناوبری برای سیگنال L1CA.
در شرایط منسجم، فاز دادههای I/Q منعکسشده تمیز باید فقط شامل اثرات مدلنشده، از جمله هرگونه نشانه تغییر ارتفاع سطح اقیانوس باشد. با این حال، اثر چند مسیری به دلیل سطح ناهموار اقیانوس باعث نوساناتی در دامنه و فاز سیگنال دریافتی میشود و همچنین میتواند باعث لغزش چرخه در هنگام باز کردن فاز شود.
برای فیلتر کردن این لغزشهای چرخه، ما روش همزمان لغزش سیکل و فیلتر نویز (SCANF) خود را اعمال میکنیم، که در اصل فقط یک PLL فیلتر کالمن با یک مرحله اضافی است که سعی در تخمین و حذف لغزشهای چرخه دارد.
شکلهای بخش بعدی نتایج اعمال کل این رویه را برای سیگنالهای منعکس شده نشان میدهد. خطوط سیاه و آبی فاز قبل و بعد از اعمال SCANF را نشان می دهد. سیگنال منعکس شده I/Q SNR نیز برای مرجع گنجانده شده است. توجه داشته باشید که چگونه پرش ها در خط سیاه با SNR محو می شوند و خط آبی به طور موثر روند فاز خط سیاه را بدون این پرش ها بازسازی می کند. این شواهد کیفی خوبی است که نشان می دهد الگوریتم SCANF موثر بوده است.
نتایج
شکل های 6، 7، 8، 9، 10، و 11 سیگنال منعکس شده SNR و فاز برای GPS PRN 6 را در 6 روز مختلف نشان می دهد. توجه داشته باشید که این روزها مطابق با روزهای مشخص شده در شکل 2 است که از آنجا مشاهده می کنیم که ارتفاع موج قابل توجه باد در روزهای 1، 5 و 6 نسبتا زیاد، در روزهای 2 و 3 معتدل و در روز 4 نسبتا کم است. ما متوجه شدیم که نوسانات SNR در روزهای 1، 5، و 6 نسبتاً بیشتر از روزهای دیگر است، که معتقدیم ممکن است نشانهای از شرایط سطح اقیانوس باشد. تجزیه و تحلیل دقیق تر این نتیجه موضوعی برای کار آینده ما است.
شکل 6: فاز باقیمانده سیگنال منعکس شده قبل از (آبی) و بعد از (سیاه) اعمال فیلتر SCANF برای مجموعه داده 11 ژوئن 2021. دامنه و فاز به ترتیب در پانل های متناوب برای L1CA، L2C و L5 نشان داده شده است.
شکل 7 : نتایج پردازش فاز برای 13 ژوئن 2021.
به طور کلی، مشاهده می کنیم که روند فاز در سه سیگنال (L1CA، L2C، L5) برای هیچ یک از روزها سازگار نیست. با همه امضاهای چند مسیری در سیگنال بازتابی تمیز شده، مشخص نبود که آیا فاز استخراجشده برای کاربردهایی مانند ارتفاعسنجی سطح اقیانوس مفید خواهد بود یا خیر، و این نتایج کیفی نشان میدهد که احتمالاً چنین نخواهد بود.
با این حال، فصل و ساعاتی از روز که برای کار ما در مورد بحث در این مقاله پردازش شد، بسیار محدود است. این امکان وجود دارد که پردازش دادههای بیشتر، بینش بیشتری در مورد اینکه آیا فاز سیگنال بازتابشده در این آزمایش قابل استفاده است یا خیر، ایجاد کند.
شکل 8 نتایج پردازش فاز برای 21 ژوئن 2021.
شکل 9 : نتایج پردازش فاز برای 25 ژوئن 2021.
قدردانی
سیستم جمع آوری داده هالیکالا با حمایت موسسه نجوم دانشگاه هاوایی و آزمایشگاه تحقیقاتی نیروی هوایی ایجاد شده است. نویسندگان از کمک های مایکل مابری، راب راتکوفسکی، دانیل اوگارا، کریگ فورمن، فرانک ون گراس و نیراج پوجارا قدردانی می کنند. این تحقیق توسط یک جایزه فرعی از اداره ملی اقیانوسی و جوی از طریق شرکت دانشگاهی برای تحقیقات جوی به CU Boulder و با حمایت مالی جزئی از برنامه کسب داده های تجاری ناسا Smallsat تامین می شود.
این مقاله بر اساس مقاله «پردازش فاز حامل اولیه برای آزمایش GNSS-R در بالای کوه Haleakala» است که در ION ITM 2023، نشست فنی بینالمللی 2023 مؤسسه ناوبری، لانگ بیچ، کالیفرنیا، 23 تا 26 ژانویه 2023 ارائه شده است. .
شکل 10 : نتایج پردازش فاز برای 1 ژوئیه 2021.
شکل 11 : نتایج پردازش فاز برای 5 ژوئیه 2021.
برایان بریتش یک دانشجوی فوق دکتری در دانشگاه کلرادو (CU) بولدر است، جایی که دکترای خود را دریافت کرد. در علوم مهندسی هوافضا JADE MORTON استاد دپارتمان علوم مهندسی هوافضا Ann and HJ Smead و مدیر مرکز تحقیقات نجومی کلرادو در CU Boulder است.
برای افرادی که نابینا هستند یا دارای بینایی ضعیف هستند، دستورات صوتی در برنامه های ناوبری رایج – اغلب همراه با وسایل کمکی دیگر، مانند عصا یا سگ راهنما – به طرز شگفت انگیزی به آنها کمک می کند تا از نقطه A به نقطه B بروند. اما کاربران این موارد برنامه ها معمولاً در طول مسیر، زمینه های زیادی را از دست می دهند. برنامههای ناوبری به شما میگویند که در گوشه بعدی باید مستقیم یا راست یا چپ بروید. اما آیا این یک گوشه 60، 90 یا 120 درجه است؟ چه نوع خیابانی خواهد بود – یک خیابان باریک برای عابران پیاده یا یک خیابان عریض با تعداد زیادی ماشین؟ آرند یان ون دونگن، ساکن Vught، هلند، که از نظر قانونی نابینا است، فکر کرد. “شما این اطلاعات را از برنامه ناوبری دریافت نمی کنید. برای داشتن یک نمای کلی از آن به یک نقشه نیاز دارید.»
افرادی که نابینا هستند یا بینایی محدودی دارند نقشه ها را آزمایش کرده اند.
یک همکاری پرشور و پرشور در هلند در حال انجام است تا به افرادی که نابینا هستند یا بینایی محدودی دارند دسترسی منظم به نقشههای لمسی داشته باشند که میتواند به آنها کمک کند تا آگاهی موقعیتی از مکانهایی که میروند – خواه در اطراف محلهشان قدم بزنند یا سفر کنند. به شهر بعدی، یا سفر به شهری دور. آژانس کاداستر، ثبت زمین و نقشه برداری هلند – معروف به Kadaster – با Esri Nederland (توزیع کننده Esri در هلند)، چندین سازمان دسترسی محلی و تعداد انگشت شماری از دانشگاه ها و دانشگاهیان برای استفاده از فناوری ArcGIS برای تولید نقشه ها بر روی کاغذ متورم کار می کند. که افراد مبتلا به اختلالات بینایی می توانند آن را لمس کنند تا مروری بر محله ها، مناطق، کل کشورها و جهان داشته باشند.
این گروه میخواهد اطمینان حاصل کند که نقشهها برای طیف گستردهای از نیازها و ترجیحات کاربران کاربردی هستند – و افرادی که بینایی ضعیفی دارند یا بدون دید میتوانند نقشهها را در صورت تقاضا، بدون کمک یک فرد بینا سفارش دهند. همکاران همچنین هدف خود را برای دسترسی به افرادی فراتر از هلند قرار داده اند.
وینسنت ون آلتنا، مشاور تحقیق و نوآوری در Kadaster گفت: «از طریق ArcGIS Living Atlas of the World، ما دادههایی برای کل جهان در مقیاسهای مختلف در دسترس داریم. “گروه پروژه مایل است این نقشه ها را در صورت تقاضا برای مردم در همه جا در دسترس قرار دهد، به ویژه کسانی که در مکان هایی زندگی می کنند که دسترسی محدودی به منابعی مانند این دارند.”
جولیان نائوتا، مدیر محصول گرافیک لمسی در بنیاد Dedicon، که یک موسسه غیرانتفاعی است، میگوید: «همه رسانههای بصری باید برای افراد کمبینا یا افراد دارای ناتوانی در خواندن اقتباس شوند، به این دلیل ساده که، اول از همه، آنها مردم هستند. متون و تصاویر را در قالب های جایگزین بازتولید می کند و به پروژه کمک می کند. “برای اینکه آنها بتوانند به طور کامل در جامعه بسیار بصری و پر تصویر ما شرکت کنند، به راهی برای درک تصاویر، خواندن متن و تجربه نقشه ها نیاز دارند.”
یک راه حل دیجیتال ظهور می کند
اگرچه نقشه های لمسی برای افراد نابینا یا کم بینا موجود است، اما تهیه آنها اغلب دشوار و زمان بر است.
افراد نابینا یا کم بینا می توانند با استفاده از انگشتان خود بفهمند مسیرهای پیاده روی، جاده ها، خطوط راه آهن، ساختمان ها، چمن و آب کجاست.
Nauta گفت: “Dedicon برای مدت طولانی نقشه های لمسی می سازد، اما همیشه یک فرآیند دستی بوده است.” وقتی کسی تماس می گیرد و نقشه یک کشور یا منطقه خاصی از شهر خود را می خواهد، یکی از تصویرگران ما شروع به کشیدن خیابان به خیابان می کند که البته بسیار کار بر است. این بدان معناست که ما نمیتوانیم تعداد زیادی نقشه در روز، در سال بسازیم.»
شش سال پیش، ون آلتنا نماینده Kadaster در یک کنفرانس بود و با آنا وتر، کارآموز Esri سوئیس در آن زمان، که از فناوری ArcGIS برای ساخت اطلس لمسی سوئیس استفاده کرده بود، برخورد کرد. ون آلتنا به کار او علاقه مند بود و از او خواست که داده ها و فایل های پروژه را برای او بفرستد تا بتواند چیزی مشابه با داده های هلندی ایجاد کند. او وقت نداشت فوراً پروژه را دنبال کند، اما چند سال بعد، زمانی که ون آلتنا با Daan Rijnberk که در آن زمان کارآموز در Kadaster بود، کار می کرد، این ایده دوباره مطرح شد.
آن دو با Bartiméus، موسسه ای برای افراد کم بینا در تماس بودند. بنیاد دسترسی، سازمانی که بر دسترسی دیجیتال، فیزیکی و اجتماعی تمرکز دارد. بنیاد ددیکن؛ و کتابخانه سوئیس برای نابینایان و کم بینایان. این سازمانها به آنها کمک کردند گروههای متمرکز را با افراد نابینا برگزار کنند تا دریابند که نقشههای لمسی چگونه میتوانند به آنها در زندگی روزمره کمک کنند.
ناوتا یکی از کاربران را در یک گروه تمرکز اولیه به یاد می آورد که گفته بود یک بار از خط راه آهن محلی برای رفتن به یک فروشگاه سخت افزار در یک روستای همسایه استفاده کرده است. چند روز بعد، آن شخص مجدداً برای بازدید از یک مغازه لوازم الکترونیکی خانگی، وارد خط آهن شد. او متوجه شد که این دو فروشگاه نزدیک به هم هستند و گفت که اگر زودتر این را می دانست، در سفر اولیه خود به هر دو مغازه سر می زد.
نائوتا گفت: «ما افراد بینا، وقتی به مکانی میرویم، میتوانند فوراً هر چیزی را که در اطراف آن مقصد است ببینند. تا به حال، افراد کم بینا واقعاً نمیتوانستند این کار را انجام دهند، مگر با نقشههای دستساز که Dedicon تولید میکند، اما نمیتواند در مقادیر کافی تولید کند.»
راهی جدید برای به دست آوردن زمینه
در کار با Esri Nederland، van Altena و Rijnberk از ArcGIS Pro به همراه دادههای Kadaster و ArcGIS Living Atlas برای ساختن برخی نقشهها استفاده کردند. به جای اینکه روزها طول بکشد، حدود 20 دقیقه طول کشید تا هر نمونه اولیه را کنار هم بگذارند.
افسانه های نقشه نمادشناسی را به خط بریل توضیح می دهند.
ون آلتنا گفت: «نقشههای قابل چاپ قابل لمس محلهها، و همچنین نقشههای هلند که زمینه را فراهم میکردند، مانند مراکز استانها و مسیر راهآهن در کشور تولید کردیم.»
سپس تیم آزمایش قابلیت استفاده را با افرادی که نابینا هستند یا دید محدودی دارند انجام داد. الن زیلمان، یکی از آزمایش کنندگان، گفت که اولین باری که یکی از نقشه های لمسی Kadaster از جهان را احساس کرد، شگفت زده شد.
زیلمان در ویدئویی که توسط Kadaster تهیه شده و تجربه او را به عنوان یک آزمایشگر نقشه برجسته می کند، گفت: “با یک انگشت، می توانستم هلند را بپوشانم، و به هر دو دست نیاز داشتم تا از اندازه روسیه ایده بگیرم.” “جهان بینی من غنی شده است، زیرا اکنون به همان دانشی دسترسی دارم که دیگران دارند.”
وقتی ون دونگن نقشه های لمسی را آزمایش کرد، این کار را در Zwolle، نزدیک دفتر Kadaster انجام داد.
او گفت: “من توانستم منطقه را تشخیص دهم، اما چیزهایی را نیز روی نقشه دیدم که نمی دانستم.” «با نقشهای که به روش درست ساخته شده است، میتوانید دید کلی خوبی از یک موقعیت داشته باشید و از آن برای جهتدهی خود در زندگی روزمره استفاده کنید. … برای مثال، وقتی در تعطیلات هستم، دوست دارم اطراف هتل یا مجتمع آپارتمانی را که قرار است در آن اقامت کنم، بدانم. یا اگر مجبور باشم به بیمارستانی بروم، میتوانم یک دید کلی از راهروها و نحوه قرارگیری بخشهای مختلف بیمارستان داشته باشم تا زمانی که آنجا هستم راحتتر بتوانم راهم را پیدا کنم.»
از طریق آزمایش، این تیم متوجه شد که مردم عمدتاً میخواهند از نقشهها استفاده کنند تا بفهمند شهرها و محلهها چگونه چیده شدهاند، فروشگاهها در کجا قرار دارند و چه مسیرهایی برای رفت و آمد در دسترس هستند. یک زن که چندین سال پیش بینایی خود را از دست داده بود، می خواست بداند مرکز خرید جدید در جامعه او چگونه است.
نیلز ون در وارت، رئیس مدیریت محصول و نوآوری در Esri Nederland، گفت: «او میداند محلهاش قبلاً چه شکلی بود، اما نمیداند که مرکز خرید چگونه است – و مرتباً به خرید میرود. او از ما خواست تا نقشه ای از مرکز خرید ایجاد کنیم تا بتواند از نحوه چیدمان آن مطلع شود.
Van Altena معتقد است که آگاهی فضایی ارائه شده توسط این نقشه ها می تواند فراتر از نیازهای فوری و روزمره مردم باشد.
او گفت: «نقشهها همچنین میتوانند به کاربران درک بهتری از جامعه و موقعیتهای خاص – در داخل شهرهای خودشان، بلکه در سطح اروپاییتر و حتی جهانیتر بدهند.»
چالش فیلتر کردن داده ها
همانطور که افراد بینا می توانند نقشه های دیجیتال را مطابق میل خود تنظیم کنند – با بزرگنمایی در یک منطقه خاص یا فیلتر کردن لایه ها به طوری که آنها فقط ساختمان ها یا پوشش گیاهی را نشان دهند – افرادی که با چشم خود نمی بینند باید بتوانند نقشه های خود را ایجاد کنند.
برچسبهای بریل باید 24 نقطه با جهت افقی باشند، بنابراین تعداد زیادی نمیتوانند روی نقشه قرار بگیرند.
ون دونگن گفت: «مهمترین چیز این است که شما بتوانید تصمیم بگیرید که در نقشه چه می خواهید. برای من، وقتی وارد یک ایستگاه [قطار] می شوم، می خواهم بدانم که آیا وارد جلو یا پشت سالن می شوم. دیگران ممکن است به این موضوع اهمیتی ندهند.»
فیلتر کردن داده ها به ویژه هنگام تولید نقشه های لمسی چالش برانگیز است زیرا اطلاعات کمی را می توان در هر نقشه قرار داد.
ون آلتنا گفت: «از آنجایی که افراد نابینا از نوک انگشتان خود برای کاوش نقشه ها استفاده می کنند، به فضایی بین ساختارها، الگوها و خطوط نیاز دارند تا بتوانند آنها را تشخیص دهند.
ناوتا توضیح داد: «برای اینکه بتوانیم یک خط را احساس کنیم، حداقل ضخامت آن باید حدود سه چهارم میلی متر باشد. “برای تشخیص یک خط از یک خط کمی ضخیم تر، آن خط دوم باید تقریبا دو برابر ضخامت باشد. و برای اینکه بتوانیم تعیین کنیم که یک شی در کجا به پایان می رسد و شی بعدی شروع می شود، باید بین آنها سه یا چهار میلی متر فاصله وجود داشته باشد.
با هدف دستیابی به این نقشه ها تا حد امکان، این تیم از کاغذ متورم به اندازه حرف استفاده می کند که در چاپگرهای لیزری کار می کند. نقشه ها با جوهر سیاه چاپ می شوند و سپس کاغذ در یک اجاق کوچک (که شبیه لمیناتور است) قرار می گیرد که پوشش شیمیایی کاغذ را فعال می کند. در عرض چند ثانیه، جوهر به سمت بالا منبسط می شود تا یک ارتفاع یکنواخت. نتیجه نقشه ای است که مردم می توانند با نوک انگشتان خود آن را احساس کنند.
از آنجایی که مساحت سطح نقشه ها بسیار محدود است، تیم در حال آزمایش نحوه ارائه اطلاعات روی نقشه های لمسی است.
ون در فارت گفت: «ما در تلاشیم تا بفهمیم که یک نفر میتواند چند نماد مختلف را با انگشتان خود تشخیص دهد، از چه نمادشناسی استفاده کنیم و چند لایه اطلاعاتی را ارائه دهیم. “آیا ابتدا نقشه ای را فقط با جاده ها ارائه می کنیم و سپس نقشه دومی را با جاده ها و ساختمان ها ارائه می کنیم یا با نقشه ای با اطلاعات زیادی شروع می کنیم و سپس نقشه ای با اطلاعات کمتر به مردم می دهیم؟”
نمادشناسی نقشه لمسی چگونه کار می کند
تیم هنوز با این سوالات دست و پنجه نرم می کند. اما در حال حاضر، اولین نقشهای که این تیم برای کاربران میسازد، یک لایه پایه است که فقط آبراهها، راهآهنها و جادههای یک منطقه را نشان میدهد.
نقشه های لمسی باید فضای کافی بین ساختارها، الگوها و خطوط داشته باشند.
مسیرهای پیاده روی با یک خط نقطه چین با نقاط کوتاه مشخص می شوند. مسیرهای دوچرخه خطوطی هستند که در آن هر نقطه دیگر سه برابر بقیه است – بنابراین، یک نقطه یک میلیمتری، سپس یک نقطه سه میلیمتری و غیره. نمادهای متفاوتی برای جاده هایی که عمدتاً برای اتومبیل ها هستند و همچنین برای بزرگراه ها وجود دارد. اگر جاده ای اجازه ماشین و دوچرخه را بدهد، نقشه فقط نماد یک جاده مبتنی بر ماشین را نشان می دهد زیرا برای نمایش نماد هر دو بسیار شلوغ است.
از آنجا، کاربران می توانند نقشه های همراه خود را بسازند. بگویید کسی نقشه ای می خواهد که رستوران ها و ایستگاه های حمل و نقل عمومی را نشان دهد. صفحه دوم در مجموعه ای از نقشه ها ممکن است شامل جاده ها و رستوران ها باشد و صفحه سوم ممکن است جاده ها و ایستگاه های حمل و نقل را نشان دهد. یا شاید اگر فضای کافی بین نمادها وجود داشته باشد، هر سه می توانند در یک نقشه قرار بگیرند.
ون آلتنا میگوید: «نقشهها همچنین دارای یک نقطه لنگر بر روی خود هستند تا کاربران بتوانند خود را جهتیابی کنند و مکانهای خاص را بر اساس آن نقطه تشخیص دهند.»
اگرچه هیچ استاندارد جهانی برای نمادشناسی نقشه های لمسی وجود ندارد، این گروه با محققانی کار می کند که نمادهای لمسی را مطالعه می کنند و در عین حال به استفاده از بهترین روش هایی که سازمان هایی مانند بنیاد Dedicon و بنیاد دسترسی توسعه داده اند، ادامه می دهند.
یک فرآیند کاملاً مستقل
گام بعدی در پروژه ایجاد سیستمی است که به افراد نابینا اجازه میدهد بدون کمک دیگران نقشهها را درخواست کنند و حتی بسازند.
این گروه در تلاش است تا بفهمد چه نمادشناسی باید در نقشه ها استفاده شود و چه تعداد نمادهای مختلف را می توان با نوک انگشتان خود تشخیص داد.
Aafke van Welbergen، کارشناس طراحی فراگیر و کاربر محور در بنیاد دسترسی، گفت: “ما در حال کار بر روی فرآیندی هستیم تا به مردم اجازه دهیم نقشه ها را به صورت آنلاین سفارش دهند.” بسیار مهم است که نه تنها نقشهها وجود داشته باشند، بلکه به مردم اجازه دهیم تا به طور مستقل از آنها سفارش داده و از آنها استفاده کنند.»
ون در فارت گفت: «ما به دنبال ایجاد یک سیستم انتشار مبتنی بر وب هستیم و میخواهیم ببینیم که چگونه این میتواند با روشهایی که افراد نابینا از قبل اطلاعات دریافت میکنند – برای مثال از طریق Dedicon» مرتبط شود. برای بخش توسعه وب، ما به استفاده از ArcGIS Maps SDK برای جاوا اسکریپت فکر می کنیم تا نه تنها مکانیسم ترتیب نقشه، بلکه افسانه های پویا را که می خواهیم در نقشه ها استفاده کنیم، ایجاد کنیم.
هنگامی که تیم تمام فرآیند ساخت، سفارش، چاپ و استفاده از نقشههای لمسی را به صورت مستقل انجام داد، شرکتکنندگان پروژه امیدوارند که بتوانند کار خود را به سازمانهای دیگر و به افراد دیگر کشورها گسترش دهند.
ون آلتنا گفت: «ما میخواهیم طرحهای اثبات مفهومی خود را بگیریم که نشان میدهد چگونه میتوان این نقسهها را با استفاده از مجموعه دادههای ملی و ArcGIS Living Atlas تهیه کرد و دانش خود را با سایر سازمانها و آژانسهای ملی نقش هبرداری به اشتراک گذاشت.» ما به دنبال همکاری با افراد بیشتری هستیم تا بتوانیم بر اساس این ایدهها ادامه دهیم.»
به گفته شرکت تحقیقاتی Cyber Ventures، انتظار میرود هزینه سالانه جرایم سایبری تا پایان سال جاری به بیش از ۸ تریلیون دلار برسد. برای کاهش پیامدهای حملات امنیت سایبری، تیم های امنیت سایبری به طور مستمر روش های خلاقانه ای را برای پاسخگویی و آمادگی ارزیابی و توسعه می دهند. پیشرفتها در نظارت، شناسایی و تجزیه و تحلیل میتواند به عنوان یک ضربکننده نیرو برای بسیاری از خدمههای پرتعداد و اشباع از وظایف که وظیفه حفاظت از نرمافزار و فناوری را بر عهده دارند، عمل کند.
ArcGIS AllSource، نرم افزار اطلاعاتی جدید Esri، تجزیه و تحلیل تحقیقاتی، مکانی و پیوندها را تسهیل می کند. AllSource را می توان در تمام مراحل چرخه اطلاعاتی تهدیدات سایبری، از توسعه درک تهدید و جمع آوری، پردازش و تجزیه و تحلیل داده ها تا انتشار نتایج و جمع آوری بازخورد استفاده کرد. AllSource کاربران را قادر می سازد تا از تجزیه و تحلیل پیشرفته ArcGIS Enterprise به همراه دانش ArcGIS برای شناسایی ناقلان تهدید و استقرار استراتژی های کاهشی استفاده کنند که از زیرساخت سایبری سازمان محافظت می کند.
شش مرحله ای را که تیم های امنیت سایبری معمولاً برای یافتن و مطالعه تاکتیک ها، تکنیک ها و رویه های دشمنان استفاده می کنند، مرور کنید. با استفاده از یک حمله نادیده گرفتن از راست به چپ – که افراد را فریب می دهد تا روی فایل های متنی مخرب کلیک کنند – به عنوان مثال، دریابید که چگونه AllSource به ایجاد استراتژی های دفاعی کمک می کند و با پیچیدگی هر تهدید تکامل می یابد.
تحلیلگران می توانند از نمودار دانش استفاده کنند تا ببینند که موجودیت 1 تمایل دارد از بردارهای تهدید خاص سوء استفاده کند.
اقدامات مناسب برای انجام را تعیین کنیدهمه ذینفعان در یک سازمان باید بتوانند درک واضح و مشخصی از تأثیرات احتمالی یک مصالحه امنیت سایبری و همچنین نقش آنها در جلوگیری از آن به دست آورند. AllSource می تواند به عنوان نقطه شروعی باشد که از آنجا یک برنامه امنیت سایبری رشد می کند و به تحلیلگران اجازه می دهد تا ابتدا روش های حمله، مهاجمان شناخته شده و زیرساخت های سازمانی را که باید در اولویت قرار گیرند، ثبت کنند.شناسایی مواردی که سازمان باید از آن محافظت کند، مانند شبکه ها، دارایی های فیزیکی، داده های مشتری و اسرار تجاری ضروری است. از آنجا، تیم امنیت سایبری سازمان می تواند یک استراتژی اطلاعاتی تهدید را توسعه و اجرا کند. این تضمین میکند که همه اعضای تیم اولویتهای کلیدی سازمان را درک میکنند و به آنها اجازه میدهد تا در واکنش به حمله یا جلوگیری از آن، دفاعی بسیار پاسخگو داشته باشند.
جمع آوری داده ها در مورد تهدیدهاهنگامی که تحلیلگران امنیت سایبری فعالیتی را بر اساس یک بردار تهدید خاص تشخیص می دهند – روشی که یک دشمن می تواند به یک شبکه یا سیستم نفوذ کند یا نفوذ کند – آنها می توانند از AllSource برای بررسی تهدید استفاده کنند و مجموعه ای از مراحل را برای کاهش پیشگیرانه یک حمله انجام دهند.در طول یک حمله نادیده گرفتن از راست به چپ، تحلیلگران میتوانند دادهها را به AllSource وارد کنند و با منابعی مانند چارچوب MITER ATT&CK، یک پایگاه دانش در دسترس تاکتیکها و تکنیکهای حمله سایبری، ارتباط برقرار کنند. سپس میتوانند اطلاعات تهدید و دادههای عملیاتی را لایهبندی کنند و از ابزارهای تجزیه و تحلیل پیوند، نمودارها و جدولهای زمانی در AllSource استفاده کنند تا الگوهای حمله را ببینند و بینشی در مورد وضعیت به دست آورند.
داده های تهدید را پردازش کنیدهنگامی که منابع داده نقشه برداری می شوند و اطلاعات به AllSource جریان می یابد، معمولاً لازم است داده ها برای استفاده در سازمان عادی سازی شوند.به عنوان مثال، مجموعه داده MITER ATT&CK راههای زیادی را برای دسترسی به دادهها ارائه میکند، از جمله بهعنوان فایل نمادگذاری شی جاوا اسکریپت (JSON)، کتابخانه پایتون یا کتاب کار مایکروسافت اکسل. ابزارهای موجود در AllSource به تحلیلگران کمک می کند تا داده ها را آماده و تمیز کنند تا استفاده از آن برای دیگران آسان تر باشد.فرض کنید مجموعه داده MITER ATT&CK به عنوان یک کتاب کار اکسل دانلود شده است. یک تحلیلگر هر برگه را به یک پایگاه جغرافیایی سیار در AllSource وارد می کند تا مطمئن شود که همه انواع فیلدها صحیح هستند و امکان تجربه تحلیلی قوی تری را فراهم می کند. برای مثال، با استفاده از ابزار Convert Time Field، تحلیلگر میتواند بسیاری از انواع فیلدها را به فیلد تاریخ (یا متن یا فیلد عددی) تغییر دهد. این به سازمان داده های تمیز و قابل استفاده MITER ATT&CK را در یک پایگاه جغرافیایی سیار می دهد که می تواند به اشتراک گذاشته شود یا به عنوان یک کپی محلی تنظیم شود.
تجزیه و تحلیل و ارائه داده هابا دادههایی که برای استفاده آماده شدهاند، تحلیلگران میتوانند از عملکرد تحلیل پیشرفته ارائه شده توسط سایت ArcGIS Knowledge Server که در ArcGIS Enterprise مستقر شده است، استفاده کنند تا درک عمیقتری از بردار تهدید – در این مورد، نادیده گرفتن راست به چپ – به دست آورند.یک تحلیلگر اطلاعات را بیشتر بررسی می کند تا تعداد، سرعت و مکان حملات مشابهی را که هم در سازمان و هم از سازمان های دیگر گزارش شده است در یک دوره مشخص تشخیص دهد. با گسترش نمودار دانش حاصل از مجموعه داده MITER ATT&CK در AllSource، تحلیلگر میتواند تعداد انگشت شماری از سازمانها را که مستعد این نوع حملات هستند شناسایی کند. سپس تحلیلگر می تواند بردارهای تهدید خاصی را مشخص کند و ببیند که موجودیت 1 تمایل دارد از این بردارهای تهدید استفاده کند. اگر تحلیلگر موجودیت 1 را در نمودار دانش انتخاب کند، می تواند ببیند که یک سازمان تروریستی است.از طریق روابطی که در نمودار دانش ایجاد می شود، به نظر می رسد که موجودیت 1 شناخته شده است که از بردارهای تهدید اضافی در حملات خود استفاده می کند. با استفاده از AllSource، تحلیلگر می تواند چنین حملاتی را شناسایی کرده و بهترین گام ها را برای کاهش آنها تعیین کند. با مشاهده اینکه Entity 1 به خوبی با شرح فعالیتهای موجود در مجموعههای اطلاعاتی منبع باز مطابقت دارد، تحلیلگر همچنین میتواند توصیههایی با سطح قابل توجهی از اطمینان در مورد چگونگی کاهش اثرات چنین حملهای و تقویت وضعیت امنیتی سازمان خود ارائه دهد.
انتشار نتایج تجزیه و تحلیلهنگامی که تمام داده های مربوطه تجزیه و تحلیل شدند، تحلیلگران می توانند گزارش هایی را مستقیماً در AllSource با اقدامات کاهشی توصیه شده ایجاد کنند که راه رو به جلو نشان می دهد. این امر به ذینفعان و تصمیم گیرندگان دامنه کاملی از چشم انداز عملیاتی که تیم امنیت سایبری در آن فعالیت می کند، می دهد.همچنین تحلیلگران می توانند به راحتی اطلاعات مهم را با سایر تحلیلگران به اشتراک بگذارند، مانند خدمات ویژگی، نقشه های وب، طرح بندی ها، گزارش ها و بسته های لایه و پروژه. این به آنها امکان دسترسی به دادههای منبع را میدهد و به هر کسی که در یک تیم یا در شیفتها کار میکند اجازه میدهد تحقیقات خود را انجام دهند و به تلاشهای کاهش تهدید یا پاسخ ادامه دهند. این تیمهای امنیت سایبری را قادر میسازد تا اقدامات کاهشی را انجام دهند و اقدامات بیشتری را برای جلوگیری یا عایقسازی معماری سازمانشان از حملات بعدی انجام دهند.
دریافت انتقادات و پیشنهاداتتیمهای امنیت سایبری برای اطمینان از اینکه وضعیت امنیتی یک سازمان با یک تهدید مداوم تکامل مییابد و تهدیدهای جدید را در نظر میگیرد، به طور مستمر اثربخشی پاسخهای خود به حملات و همچنین تلاشهای خود را برای جلوگیری از آنها و کاهش شدت آنها در صورت وقوع تجزیه و تحلیل میکنند. در یک جلسه postaction، ذینفعان می توانند از AllSource برای بدست آوردن بینش حیاتی استفاده کنند و مراحل کاهش را بر این اساس تنظیم کنند تا مطمئن شوند که هر گونه الزامات جدید در تاکتیک های دفاعی گرفته شده و فهرست بندی می شود.
حجم انبوه داده هایی که برای پشتیبانی از عملیات اطلاعاتی تهدیدات سایبری در دسترس است، می تواند بسیار زیاد باشد. AllSource به تیمهای امنیت سایبری کمک میکند تا با استخراج اطلاعات دقیق از آن دادهها و آوردن زمینه به فعالیتهای مشکوک، آن دادهها را درک کنند.
اطلاعات مربوط به ارتفاعات ساخته شده شهری در سطح جهان برای ارزیابی اثرات شکل و زیرساخت شهری بر محیط زیست، اقتصاد و رفاه انسان مورد نیاز است. این مطالعه یک اطلس جهانی از ارتفاعات ساخته شده شهری ارائه می دهد و تغییرات فضایی زیادی را در ارتفاعات ساخته شده در سطوح قاره، کشور و شهر نشان می دهد. نتایج نشان میدهد که شکافهای شدید در دسترس بودن زیرساختهای ساختهشده شهری در جنوب جهانی و نابرابری بزرگ در زیرساختهای ساختهشده در اکثر کشورها، اما بزرگترین در جنوب جهانی در مقایسه با شمال جهانی است. اطلس این پتانسیل را دارد که درک ما از اثرات شهرنشینی بر تقاضای مواد خام، مصرف انرژی تجسم یافته و عملیاتی، و شدت توسعه شهری را بهبود بخشد.
خلاصه
اطلاعات در مورد زیرساخت های ساخته شده شهری برای درک نقش شهرها در شکل دادن به نتایج زیست محیطی، اقتصادی و اجتماعی ضروری است. فقدان داده در مورد ارتفاعات ساخته شده در مناطق بزرگ، توانایی ما را برای توصیف زیرساخت های شهری و تغییرات فضایی آن در سراسر جهان محدود کرده است. در اینجا، ما یک اطلس جهانی از ارتفاعات ساخته شده شهری را در حدود سال 2015 با وضوح 500 متر از داده های ماهواره ای شناسایی شده از محدوده زمینی Sentinel-1 ایجاد کردیم.
نتایج نشاندهنده شکافهای شدید در سرانه زیرساختهای ساختهشده شهری در جنوب جهانی در مقایسه با میانگین جهانی، و حتی شکافهای بزرگتر در مقایسه با سطوح متوسط در شمال جهانی است. سرانه زیرساخت های ساخته شده شهری در برخی از کشورهای شمال جهانی بیش از 30 برابر بیشتر از زیرساخت های موجود در جنوب جهانی است. نتایج همچنین نشان میدهد که زیرساختهای ساخته شده در 45 کشور در شمال جهانی، با 16 درصد جمعیت جهان، تقریباً معادل 114 کشور در جنوب جهانی، با حدود 74 درصد از جمعیت جهان است.
نابرابری در زیرساختهای ساختهشده شهری، همانطور که با یک شاخص نابرابری اندازهگیری میشود، در بیشتر کشورها بزرگ است، اما در جنوب جهانی در مقایسه با شمال جهانی، بزرگترین است. تجزیه و تحلیل ما مقیاس تقاضای زیرساخت در جنوب جهانی را نشان می دهد که برای دستیابی به اهداف توسعه پایدار مورد نیاز است. اما بزرگترین در جنوب جهانی در مقایسه با شمال جهانی است.
تجزیه و تحلیل ما مقیاس تقاضای زیرساخت در جنوب جهانی را نشان می دهد که برای دستیابی به اهداف توسعه پایدار مورد نیاز است. اما بزرگترین در جنوب جهانی در مقایسه با شمال جهانی است. تجزیه و تحلیل ما مقیاس تقاضای زیرساخت در جنوب جهانی را نشان می دهد که برای دستیابی به اهداف توسعه پایدار مورد نیاز است.
برای هشدارهای PNAS ثبت نام کنید.
مدیریت هشدارهاامروزه 55 درصد از جمعیت جهان در مناطق شهری زندگی میکنند که انتظار میرود این نسبت تا سال 2050 به 68 درصد افزایش یابد ( 1 ). حدود 80 درصد از تولید ناخالص داخلی جهانی و دو سوم انتشار گازهای گلخانه ای به مناطق شهری نسبت داده می شود ( 2 ). با این حال، شهرها در سراسر جهان نابرابری زیرساختی عمیقی را نشان می دهند، با تنوع قابل توجهی در در دسترس بودن، تامین و دسترسی به زیرساخت ( 3 ).
از آنجایی که زیرساخت های شهری با رشد اقتصادی شهری و تولید ناخالص داخلی (GDP) در سطح شهر همبستگی زیادی دارد ( 4 و 5 )، سطوح بالای نابرابری زیرساخت ها می تواند به سطوح پایین تر بهره وری اقتصادی، سرمایه اجتماعی و رفاه انسانی کمک کند ( 6) . ، 7). ارزیابی نابرابری زیرساخت برای درک الگوهای توسعه ناهمگون شهرها در مناطق و کشورهای مختلف حیاتی است ( 8 ).
فرم شهری هم شامل مناطق شهری دو بعدی و تراکم و هم ارتفاعات ساخته شده سه بعدی (3-بعدی) (یعنی ویژگی های عمودی الگوهای کالبدی، چیدمان و ساختار شهرها) است ( 5 ، 9 ). مناطق شهری به طور گسترده به صورت دو بعدی با استفاده از تصاویر ماهواره ای از نورهای شبانه ( 10 ) و سری زمانی Landsat ( 11 ) نقشه برداری شده اند. با توجه به اینکه 60 تا 80 درصد از مصرف انرژی در مناطق شهری رخ می دهد ( 12 )، نقشه برداری از اشکال شهری، که نشان داده شده است بر مصرف انرژی و انتشار گازهای گلخانه ای تأثیر می گذارد، مهم است ( 13 ، 14) .).
از آنجایی که فرم شهری شامل بعد عمودی محیط ساخته شده است، نقشه برداری از ارتفاعات ساخته شده شهری می تواند اطلاعاتی در مورد عناصر حیاتی مناطق شهری ارائه دهد.همچنین یک همبستگی قوی بین تراکم ساخته شده شهری بالاتر، ساختمان های بلندتر و رشد اقتصادی شهری وجود دارد ( 4 ). مطالعه اخیر روی 477 شهر بزرگ با مجموعه داده های ماهواره ای سری زمانی جدید نشان داد که رشد حجمی شهری به شدت با تولید ناخالص داخلی در سطح شهر همبستگی دارد ( 5 ).
پیشرفت های اخیر در سنجش از دور امکان توسعه چندین مجموعه داده جدید از مناطق ساخته شده سه بعدی را فراهم کرده است، از جمله یکی از مجموعه داده های موجود در ساختمان های سه بعدی در سراسر جهان (15)، یک نقشه مورفولوژی شهری با وضوح بالا ( 16 )، سری زمانی سه دهه منطقه عمودی ساخته شده ( 17 ) و گونه شناسی رشد شهری دو بعدی و سه بعدی برای نزدیک به 478 شهر در سراسر جهان ( 18)).
با این حال، اطلاعات ارتفاع ساخته شده در مناطق بزرگ هنوز محدود است، که درک ما از توسعه شهری و پیامدهای آن برای استفاده از انرژی و انتشارات گلخانه ای را مخفی می کند ( 19 ، 20 ).در اینجا ما ارتفاعات ساخته شده شهری جهانی را در سطح شبکه 500-mx 500-m برای توصیف توزیع زیرساخت ها در مناطق شهری برآورد کردیم ( شکل 1 A و پیوست SI ، شکل های S13-18 ). ارتفاع ساخته شده به عنوان میانگین ارتفاع در یک شبکه 500 متری، شامل ساختمان ها و سایر زیرساخت ها مانند خیابان ها، پارکینگ ها و فضای سبز، با استفاده از مدلی که قبلا توسعه داده بودیم، محاسبه شد (21) .)
بر اساس داده های شناسایی شده محدوده زمینی Sentinel-1 (GRD). ما ارتفاعات ساخته شده شهری مشتق از GRD را با استفاده از منابع متعدد داده های مرجع اعتبارسنجی کردیم. ما دریافتیم که ارتفاعهای ساختهشده شهری مطابقت خوبی با دادههای مرجع نشان میدهند و میتوانند تغییرات ارتفاعات ساختهشده از هستههای شهری تا مناطق حاشیهشهری را به تصویر بکشند. این مجموعه داده جدید ارتفاعات ساخته شده جهانی پتانسیل قابل توجهی برای بهبود درک ما از چگونگی تغییر سطح زمین توسط فعالیت های شهری، آشکار کردن نابرابری های فضایی زیرساخت های شهری و کمک به مطالعات انرژی و آب و هوا دارد.عکس. 1.
( الف ) ارتفاعات ساخته شده شهری جهانی که از مشاهدات ماهواره ای به دست آمده است. رنگ و ارتفاع میله نشان دهنده ارتفاع ساخته شده در هر شبکه 500 متری است. ( ب ) اشکال شهری شهرهای با مساحت بیش از 100 کیلومتر مربع در شش نوع بر اساس تراکم (نفوذ ناپذیری) و ارتفاعات ساخته شده (میانگین و تغییرات). این شش نوع شهر عبارتند از (1) پراکنده و همگن کم، (2) متراکم و همگن کم، (3) کم و ناهمگن کم، (4) متراکم و ناهمگن کم، (5) پراکنده و همگن بالا، و (6) متراکم و همگن بالا.
نتایج
شکل شهری شهرها با ترکیب تراکم شهری و ارتفاع ساخته شده.
اطلس جهانی ارتفاعات ساخته شده شهری ( شکل 1 الف ) اطلاعات حیاتی را برای توصیف فرم شهری به صورت دو بعدی تا سه بعدی در سراسر جهان فراهم می کند. به طور کلی، نواحی شهری تحت سلطه تراکم کم و توسعه گسترده با ارتفاعات ساخته شده شهری کم هستند. ارتفاعات ساخته شده، تغییرات فضایی زیادی را در شهرها و مناطق نشان می دهد. شهرهایی با سطح عمودی بالا عمدتاً در شرق آسیا و اروپای غربی قرار دارند. دو کشور با بیشترین وسعت کل شهری، ایالات متحده و چین، الگوهای متضادی از ارتفاعات ساخته شده دارند. میانگین ارتفاع ساخته شده در چین دو برابر بیشتر از ایالات متحده است.
این موضوع مطالعات دیگری را تأیید می کند که تفاوت های مشابهی را در ارتفاعات ساخته شده بین این دو کشور پیدا کرده اند ( 5 ، 17) .). اگرچه مجموع وسعت شهری آنها مشابه است، اما به دلیل تفاوت در ارتفاعات ساخته شده، آنها در ظرفیت خود برای پذیرش جمعیت شهری متفاوت هستند.
ما هم تراکم شهری (یعنی نفوذ ناپذیری) و هم ارتفاعات ساخته شده (یعنی میانگین و تنوع در یک شهر) را ارزیابی کردیم و شهرهای سراسر جهان را در شش دسته گروه بندی کردیم. برخی از این شش نوع شهر، خوشه بندی جغرافیایی را نشان می دهند ( شکل 1 B ). به عنوان مثال، منطقه اقیانوس اطلس جنوبی ایالات متحده توسط شهرهایی با تراکم کم، و ارتفاعات کم و همگن ساخته شده است، در حالی که شهرهای شرق آسیا عمدتاً بلند و نه چندان متراکم هستند.
اگرچه شباهت ها در تراکم شهری و ارتفاعات ساخته شده در سطح شهر در سطح جهانی قابل تشخیص است ( شکل 1 B )، اطلاعات با وضوح مکانی بالا در مورد ارتفاعات ساخته شده به دلیل تنوع زیاد در ارتفاعات ساخته شده در داخل هنوز مورد نیاز است. شهرها ( شکل 2 ). به طور کلی، بیشتر شهرها دارای یک قله مشخص در ارتفاعات ساخته شده در مرکز شهری هستند، با کاهش ارتفاع از مرکز به سمت خارج به مناطق اطراف. با این حال، برخی شهرها با چندین مرکز شهری (مانند کیپ تاون، آفریقای جنوبی، و دهلی نو، هند) وجود دارند که با بیش از یک قله ارتفاع ساخته شده نشان داده شده است.
در برخی از شهرها مانند دهلی نو، که محدودیتهای سیاستی در مورد ارتفاع ساختمان وجود دارد ( 22نتایج نشان می دهد که هم تراکم و هم ارتفاع ایجاد شده به طور کلی کم هستند. برخی از شهرهای بزرگ و کممرتبه مانند آتلانتا، جورجیا در ایالات متحده، دارای ساختمانهای بلند در مراکز شهری خود هستند، اما نسبت چنین ساختمانهایی بسیار کم است. شهرهایی مانند سئول، جمهوری کره (کره جنوبی)، مانند برخی از شهرهای اروپایی (مانند مونیخ، آلمان) دارای مناطق بزرگ با ارتفاعات بالا در خارج از مراکز شهری هستند.شکل 2.
نمای سه بعدی از شهرهای معرف برای شش نوع فرم شهری در شکل 1 B. هیچ کدام نشان می دهد که چنین گروه شهری در آن قاره وجود ندارد.
شکاف های شدید در زیرساخت های ساخته شده شهری در جنوب جهانی.
ما دریافتیم که ثروتمندترین کشورهای جهان به طور نامتناسبی در کل زیرساخت های ساخته شده شهری جهانی مشارکت می کنند ( شکل 3)). در مجموع 45 کشور در شمال جهانی با مجموع 16٪ از جمعیت جهان، تقریباً به اندازه 114 کشور در جنوب جهانی، که حدود 74٪ از جمعیت جهان را در اختیار دارند، زیرساخت های ساخته شده شهری جهانی دارند. با هم، سه کشور برتر با بیشترین میزان زیرساخت های ساخته شده شهری، چین، ایالات متحده و ژاپن، حدود 50 درصد از کل جهان را تشکیل می دهند.
به طور کلی، کشورهای بیشتری در شمال جهانی (به عنوان مثال، ایالات متحده، ژاپن، روسیه، آلمان، فرانسه، ایتالیا) وجود دارد که هر کدام بیش از 2٪ در کل زیرساخت های ساخته شده جهانی مشارکت دارند. شایان ذکر است که سطوح پایین شهرنشینی در جنوب جهانی ممکن است منجر به دست کم گرفتن زیرساخت های ساخته شده سرانه شود، زیرا ما فقط زیرساخت های شهری را در این تحلیل لحاظ کردیم.شکل 3.
سهم زیرساخت های ساخته شده شهری در شمال و جنوب جهانی. در مجموع 45 کشور در شمال جهانی و 114 کشور در جنوب جهانی تقریباً درصدی معادل از زیرساخت های ساخته شده جهانی دارند. نام کشورها و قسمت های آنها در شکل نشان داده شده است.
این تجزیه و تحلیل تفاوت های بزرگی را در سرانه زیرساخت های ساخته شده در بین کشورها و شکاف های شدید در سرانه در دسترس بودن زیرساخت های شهری بین شمال جهانی و جنوب جهانی را آشکار می کند ( شکل A و B ). اگرچه کل زیرساخت های ساخته شده شهری در برخی از کشورها مانند چین بزرگ است، سطح سرانه هنوز در مقایسه با شمال جهانی به طور قابل توجهی پایین تر است.
یافتهها نشان میدهد که زیرساخت سرانه برای حدود 90 درصد جمعیت جهان کمتر از سطح متوسط شمال جهانی است. متوسط سرانه زیرساخت های ساخته شده شهری شمال جهانی تقریباً 300 متر مکعب است که تقریباً سه برابر در جنوب جهانی (108 متر مکعب) است.).
برخی از کشورهای شمال جهانی (به عنوان مثال، ایالات متحده) دارای سرانه زیرساخت های ساخته شده بزرگتر از 600 متر مکعب هستند ، در حالی که این زیرساخت در برخی از کشورهای جنوب جهانی مانند بنگلادش به 20 متر مکعب می رسد که منعکس کننده یک وضعیت شدید است. اختلاف 30 برابری دامنه وسیع و تنوع زیرساخت های سرانه در شمال جهانی نشان می دهد که می توان سطوح بالایی از توسعه شهری با سطوح پایین زیرساخت سرانه داشت.
علاوه بر این، با میانگین 47 متر مکعب ، تقریباً تمام کشورهای آفریقایی سطح زیربنای سرانه کمتری نسبت به سایر کشورهای جنوب جهانی دارند ( شکل 4 D). علاوه بر این، نتایج نشان می دهد که ارتباط معنی داری و قوی بین تولید ناخالص داخلی سرانه و سرانه زیرساخت شهری وجود دارد ( شکل 4 C و پیوست SI ، شکل S7 ). این رابطه نشان دهنده تقاضای زیادی برای زیرساخت های آینده در جنوب جهانی است.شکل 4.
( الف ) سرانه زیرساخت های ساخته شده شهری بر اساس کشور. خطوط تیره قرمز، سبز و آبی به ترتیب میانگین کشورهای شمال جهانی (N؛ 300 متر مکعب سرانه)، جنوب جهانی (S؛ 108 متر مکعب به ازای هر نفر) و همه (163 متر مکعب سرانه) کشورهای جهان است. . عرض میله نشان دهنده سهم جمعیت هر کشور است. رنگ نشان دهنده تولید ناخالص داخلی سرانه هر کشور است. نقاط قرمز نشان دهنده کشورهای شمال جهانی است. ( ب ) زیرساخت های ساخته شده سرانه در جنوب و شمال جهانی. ( ج ) رابطه بین تولید ناخالص داخلی سرانه و زیرساخت های ساخته شده در جنوب و شمال جهانی. ( دی) نقشه زیرساخت های ساخته شده سرانه. مرزهای سبز در نقشه نشان دهنده کشورهای جنوب جهانی است.
نابرابری بزرگ در زیرساخت های ساخته شده شهری در جنوب جهانی
ما نابرابریهای بزرگی را در زیرساختهای ساختهشده شهری در بیشتر کشورها یافتیم، اما در کشورهای جنوب جهانی در مقایسه با کشورهای شمال جهانی، بیشترین نابرابریها را یافتیم ( شکل 5 A و B ). با استفاده از روش های پیشنهاد شده توسط Pandey و همکاران. ( 3 ) و برلسفورد و همکاران. ( 23 )، ما یک شاخص نابرابری را محاسبه کردیم که سطح نابرابری فضایی را در زیرساخت های ساخته شده شهری اندازه گیری می کند.
هر چه مقدار شاخص بالاتر باشد، نابرابری در زیرساخت های ساخته شده بیشتر می شود. به طور کلی، نابرابری در زیرساخت های ساخته شده در جنوب جهانی (میانگین: 0.58) در مقایسه با شمال جهانی (میانگین: 0.49) بیشتر است ( شکل 5 B و C و پیوست SI ، شکل S8).). با این حال، تفاوت در نابرابری زیرساخت های ساخته شده بین جنوب و شمال جهانی کمتر از زیرساخت های ساخته شده سرانه است. علاوه بر این، مشابه زیرساخت های سرانه، نابرابری در کشورهای آفریقایی در مقایسه با سایر کشورهای جنوب جهانی بزرگتر است ( شکل 5 E ).
تعداد قابل توجهی از کشورهای آفریقا و آسیا دارای شاخص های نابرابری فوق العاده بالای بالای 0.6 هستند. با این حال، نتایج متفاوت از سرانه زیرساخت های شهری، ارتباط معنی داری بین نابرابری زیرساخت ها و تولید ناخالص داخلی سرانه نشان نمی دهد ( شکل 5 D) به این معنی است که توسعه اقتصادی خود ممکن است مشکل نابرابری زیرساخت را حل نکند. این دیگر تحقیقات اخیر را تأیید می کند که نشان می دهد نابرابری زیرساخت های شهری یکی از ویژگی های شهرنشینی است ( 3 ).شکل 5.
( الف ) نابرابری در زیرساخت های ساخته شده شهری بر اساس کشور. خطوط تیره قرمز، سبز و آبی به ترتیب میانگین کشورهای شمال جهانی (N; 0.49)، جنوب جهانی (S; 0.58) و همه (0.55) کشورها هستند. عرض نوار نشان دهنده سهم جمعیت هر کشور است. رنگ نشان دهنده تولید ناخالص داخلی سرانه هر کشور است.
نقاط قرمز نشان دهنده کشورهای شمال جهانی است. ( ب ) نابرابری های زیرساختی در کشورهای جنوب و شمال جهانی. ( ج ) نابرابریهای زیرساختی در کشورهای جنوب و شمال جهانی برگرفته از میانگین (متر�) و SD (پ�) از توزیعهای زیرساختی ساختهشده با کران بالای 95 درصد محدود شده است. ( د ) رابطه بین تولید ناخالص داخلی سرانه و نابرابری های زیرساختی. ( ه ) نقشه نابرابری های زیرساختی. مرزهای سبز در نقشه نشان دهنده کشورهای جنوب جهانی است.
پیامدهای ارتفاعات ساخته شده شهری جهانی.
اطلس جهانی ارتفاعات ساخته شده پیامدهای مهمی برای استفاده از انرژی و کاهش تغییرات آب و هوا دارد. به عنوان مثال، مصرف انرژی مرتبط با حمل و نقل شهری به دلیل سهم زیادی از کل مصرف انرژی و پتانسیل کاهش تغییرات آب و هوا از اهمیت ویژه ای برخوردار است. تراکم جمعیت بالاتر با مایل های کمتر طی شده توسط وسایل نقلیه و مصرف انرژی مرتبط است ( 24 ). ارتفاعات ساخته شده نسبت به تراکم جمعیت، اندازه گیری مستقیم و مکانی-زمانی منسجم تری از شکل شهری را ارائه می دهد، که اغلب نیاز به کاهش مقیاس از داده های سطح منطقه ای دارد ( 25 ).
علاوه بر این، ما یک رابطه منفی بین میانگین ارتفاعات شهری و مصرف انرژی مربوط به حمل و نقل پیدا کردیم ( شکل 6)). ما رابطه قوی بین مصرف انرژی مرتبط با حمل و نقل و اندازه گیری های دوبعدی وسعت شهری پیدا نکردیم ( ضمیمه SI ، شکل S9 ). شهرهایی با ارتفاع کمتر ساخته شده در مقایسه با شهرهای عمودی تر، مصرف انرژی مرتبط با حمل و نقل بالاتری دارند.
این نشان میدهد که استراتژیهای کاهش مصرف انرژی حملونقل ممکن است از طریق رشد عمودی استراتژیک که افراد بیشتری را در نزدیکی مشاغل قرار میدهد، به دست آید. با این حال، معاوضه بین انرژی کمتر حمل و نقل و شدت مواد و انرژی بیشتر برای ساخت و راه اندازی ساختمان های بلند باید در نظر گرفته شود.شکل 6.
مصرف انرژی مرتبط با حمل و نقل و میانگین ارتفاع ساخته شده شهرها (متر). خطوط یکپارچه افقی نشان دهنده محدوده چندک اول و سوم ارتفاعات ساخته شده شهر است. خط چین منحنی رگرسیون غیرخطی بین میانگین ارتفاع و مصرف انرژی سرانه است. STD، انحراف معیار.
بحث
تغییرات فضایی زیاد در ارتفاعات ساخته شده را می توان به عوامل مختلفی مانند تاریخچه کاربری و سیاست ها نسبت داد، به ویژه با توجه به سرمایه گذاری های اولیه زیرساختی، منطقه بندی، کدهای ساختمانی و محدودیت های ارتفاع. محدودیتهای کاربری زمین و زیرساختها و سیاستهای حملونقل از مهمترین عوامل ایجاد ارتفاع ساختمانها هستند. ارتفاعات ساخته شده در شرق آسیا به طور کلی بالاتر از آمریکای شمالی و اروپا است، در حالی که تراکم جمعیت نسبتاً پایین در اکثر شهرهای ایالات متحده بازتاب ارتفاع کمتر ساخته شده شهری است.
علیرغم تراکم بالای جمعیت در چین و هند، ارتفاعات ساخته شده شهری در چین به طور قابل توجهی در مقایسه با هند بلندتر است که عمدتاً به دلیل مقررات نسبت مساحت در هند است ( 22) .). ارتفاعات ساخته شده عموماً در کشورهایی که در دهه های اخیر دچار شهرنشینی قابل توجهی شده اند در مقایسه با کشورهایی که انتقال شهرنشینی آنها چندین دهه پیش رخ داده است، بالاتر است ( 26 ).
علاوه بر این، محدودیت منابع زمین و قیمت بالای زمین با ارتفاعات شهری بالاتر در آسیا و اروپا همبستگی دارد ( 27 ، 28 ).شکاف شدید در سرانه زیرساختهای ساختهشده در جنوب جهانی نشاندهنده تقاضای جهانی قریبالوقوع بزرگ برای مواد و افزایش انرژی و انتشارات گلخانهای در صورت پر شدن این شکاف است. همچنین نتایج حاکی از افزایش تقاضا برای زیرساخت ها با توسعه اقتصادی است. برای رفع شکاف زیرساختی، حتی با فرض عدم رشد جمعیت، به بیش از مجموع زیرساختهای ساختهشده جهانی نیاز است.
با رشد جمعیت مورد انتظار، این تقاضا می تواند بین 1.25 تا 1.65 برابر کل زیرساخت های ساخته شده شهری کنونی در جهان تحت سناریوهای مسیر اجتماعی-اقتصادی مشترک 1 (پایداری) و مسیر اجتماعی-اقتصادی مشترک 3 (رقابت منطقه ای) افزایش یابد (29) .)، به ترتیب. با تقاضای فزاینده برای مصالح ساختمانی و خاکهای کمیاب تخصصی، ممکن است در توسعه زیرساختها در جنوب جهانی یک تاخیر مداوم وجود داشته باشد که منجر به سطوح پایین توسعه انسانی میشود. علاوه بر این، بیشتر پیشبینیهای شهرنشینی آینده در بیشتر مطالعات تنها گسترش جانبی زمین شهری را در نظر گرفتهاند. درک بهتر از رشد عمودی شهری برای توسعه پیش بینی های واقعی تر از تقاضای آینده برای زیرساخت های ساخته شده مورد نیاز است
.نابرابری بزرگ در زیرساخت های ساخته شده شهری در سرتاسر جهان مستلزم چالش های بزرگی برای توسعه پایدار است، زیرا زیرساخت ها به طور مستقیم یا غیرمستقیم بر 72 درصد از اهداف اهداف توسعه پایدار سازمان ملل تأثیر می گذارد (30) .). این چالش در جنوب جهانی، با نابرابری بیشتر زیرساخت ها، به ویژه در کشورهای آفریقایی، بزرگ ترین است.
از آنجا که توسعه اقتصادی به خودی خود نابرابری زیرساخت ها را کاهش نمی دهد، تلاش ها و استراتژی های دیگری برای کاهش نابرابری زیرساخت های ساخته شده شهری مورد نیاز است. حتی اگر این مطالعه نابرابری زیرساختهای جهانی را مورد بررسی قرار داد، دامنه محدود این مطالعه مستلزم بررسی بیشتر در مورد شیوههای کارآمد، مؤثر و اقتصادی است که میتواند نابرابری زیرساختها را کاهش دهد.
علاوه بر این، بررسی بیشتر نابرابری زیرساخت ها فراتر از سطح ملی در کشورهای بزرگ (مثلاً چین) با تغییرات منطقه ای قابل توجهی از زیرساخت های ساخته شده می تواند بینش های جدیدی را برای توسعه پایدار در مقیاس های کوچکتر ارائه دهد.اطلاعات در مورد تغییرات ارتفاع ساخته شده در داخل یک شهر پتانسیل قابل توجهی برای پیشبرد مطالعاتی مانند آب و هوای شهری و مدل سازی مصرف انرژی دارد ( 31 ، 32 ).
تهویه در فضای باز می تواند تحت تأثیر تغییرات ارتفاع ساختمان قرار گیرد ( 33 ). ارتفاعات ساخته شده شبکه بندی شده همچنین به عنوان ورودی کلیدی برای برآورد سایر پارامترهای سطح شهری مهم مانند ناهمواری عمل می کند که می تواند به طور قابل توجهی بر محیط جوی شهری تأثیر بگذارد. مصرف انرژی حملونقل و انتشار گازهای گلخانهای عموماً در شهرهایی با یک مرکز واحد بیشتر است، در مقایسه با شهرهایی با مراکز متعدد ( 34 ) که میتوانند دسترسی کلی را افزایش دهند، طول سفر را کوتاهتر کنند و خدمات حملونقل عمومی را بهینه کنند ( 35) .).
فراوانی ارتفاعات مختلف ساختهشده در داخل شهر میتواند به آشکار کردن کاربریهای زمین شهری و الگوهای سفر کمک کند و بنابراین، از مطالعات در مورد حملونقل شهری و استفاده از انرژی حمایت کند.اطلس ارتفاعات ساخته شده می تواند درک ما را از تقاضا برای مصالح ساختمانی، استفاده از انرژی تجسم یافته و عملیاتی و کربن مرتبط بهبود بخشد ( 36-38 ) .
به عنوان مثال، ارتفاع ساختمان برای تخمین فضای کف ساختمان، یک متغیر حیاتی در مدل سازی انرژی و تقاضای مصالح استفاده شده است ( 39 ). واضح است که مناطقی با ارتفاع زیاد ساخته شده حاوی مصالح ساختمانی بیشتری مانند سیمان هستند. با این حال، تغییرات فضایی زیاد ارتفاعهای ساخته شده در اکثر مطالعات کربن به دلیل در دسترس بودن دادههای محدود، بهویژه در جنوب جهانی در نظر گرفته نشده است ( 40 ، 41) .
). در مقایسه با نقشههای دوبعدی مناطق شهری، ارتفاعهای ساخته شده میتواند به طور قابل توجهی در شهرهایی با مناطق شهری مشابه متفاوت باشد، که منجر به تفاوتهای زیادی در حجم شهری و مصرف انرژی در این شهرها یشود (42 ) . علاوه بر این، ساختمانهای بلند نسبت به ساختمانهای کممرتبه انرژی بیشتری مصرف میکنند و شار گرمای انسانی بیشتری را به جو منتشر میکنند ( 42 ). برآورد دقیق شار حرارتی انسانی ساختمان برای درک بهتر سهم ساختمانها در اقلیم شهری و حمایت بیشتر از توسعه پایدار مفید است.
اطلس ارتفاعات ساخته شده همچنین اطلاعات منحصر به فردی را برای تخمین و پیش بینی مصرف انرژی ساختمان و انتشار گازهای گلخانه ای ارائه می دهد. اطلاعات مربوط به ارتفاع ساخته شده می تواند به طور قابل توجهی کمیت فضای کف ساختمان را بهبود بخشد که یکی از مهم ترین عوامل در مدل سازی مصرف انرژی تجسم یافته و عملیاتی ساختمان است.
برای مثال، فضای کف ساختمان یکی از متغیرهای کلیدی در مدلهای ارزیابی یکپارچه است، مانند GCAM (مدل ارزیابی تغییرات جهانی) ( 43 ) و MESSAGE (مدلی برای استراتژیهای جایگزین استراتژی تامین انرژی و اثرات کلی محیطی آنها) ( 44) .) که می تواند تقاضاهای انرژی ساختمان در آینده را برای ارزیابی تأثیر تغییرات آب و هوا و توسعه استراتژی های کاهش پیش بینی کند.
با این حال، اطلاعات فعلی در مورد فضای طبقه ساختمان، به ویژه در جنوب جهانی، محدود است ( 39 ). اگرچه مقیاس های فضای کف ساختمان به صورت خطی با وسعت شهری است، اما به دلیل تغییرات در ارتفاع ساخته شده، هنوز اختلافات قابل توجهی وجود دارد ( ضمیمه SI ، شکل S10).). به عنوان مثال، شهرستان های هادسون، نیوجرسی و کینگز، نیویورک رابطه بین فضای کف و وسعت شهری را به دلیل تفاوت های اساسی در ارتفاعات ساخته شده در این دو شهرستان دنبال نمی کنند. این مثال اهمیت ادغام ارتفاعهای ساخته شده را در برآورد دقیق فضای کف ساختمان، حتی در سطح شهرستان، نشان میدهد.
بدون در نظر گرفتن ارتفاعهای ساخته شده، میتوان در مطالعات آینده استفاده از انرژی ساختمان و انتشار گازهای گلخانهای مرتبط با آن، تعصبات در فضای تخمینی طبقات ساختمان منتشر شود.مجموعه دادههای مربوط به ارتفاعات و زیرساختهای ساختهشده شهری جهانی همچنین میتواند از کاربردهایی مانند مقیاسبندی شهری ( 45 ، 46 ) و نقشهبرداری توزیع جمعیت و پویایی ( 25 ، 45 ، 46 ) پشتیبانی کند.
مطالعات نشان میدهد که حجم زیرساختهای شهری با جمعیت سریعتر از سطح شهری مقیاس میشود ( 45 ). اندازهگیریهای مداوم زیرساختهای ساختهشده شهری سهبعدی یک شاخص شهری جامعتر برای بررسی روابط مقیاس قدرت-قانون اندازه شهر ارائه میکند.
ارتفاعات ساخته شده همچنین میتواند ظرفیت ما را برای کاهش مقیاس جمعیت ملی به مقیاسهای فضایی ظریفتر ارتقا دهد. در مقایسه با رویکردهای سنتی که فقط مناطق شهری دوبعدی (به عنوان مثال، نورهای شبانه) را در نظر می گیرند ( 7)ارتفاعات ساخته شده می تواند جمعیت را در شبکه هایی با وسعت شهری و فعالیت های انسانی مشابه متمایز کند. به عنوان مثال، ارتفاعات ساخته شده برای ترسیم پویایی جمعیت ساعتی همراه با سایر داده های سنجش از دور و مکانی استفاده شده است ( 25 ).
علاوه بر این، ارتفاعات ساخته شده می تواند به نقشه برداری از کاربری های شهری (به عنوان مثال، تجاری، مسکونی، صنعتی) کمک کند ( 48 ). با کمک اطلاعات عمودی، کاربری های شهری با عملکردهای مختلف را می توان بهتر شناسایی کرد و بنابراین، پویایی زمانی (مثلاً روزانه) جمعیت ها را بهتر مشخص کرد.
مواد و روش ها
داده ها.
داده های Sentinel-1.
ما دادههای Sentinel-1 GRD را بهعنوان منبع اصلی داده در نقشهبرداری ارتفاع ساختهشده شهری جهانی جمعآوری کردیم. دادههای Sentinel-1 GRD، هر دو با مدارهای صعودی و نزولی، در حدود سال 2015 جمعآوری شدند که پوشش جهانی دادههای Sentinel-1 در دسترس قرار گرفت ( 49 ). در اینجا، صحنههای GRD استفادهشده از حالت ابزار نوار وسیع تداخلسنجی جمعآوری شد، که از آن ضرایب پراکندگی برگشتی (یعنی VV [همقطبیسازی] و VH [قطبیشدن متقاطع]) از یک ابزار SAR با باند C دو قطبی در آنبورد گنجانده شد. با وضوح فضایی خام 10 متر.
مرجع داده های ارتفاع ساخته شده
ما داده های ارتفاع ساخته شده مرجع را در 37 شهر در ایالات متحده ( 7 ) و اروپا (30 ) ( ضمیمه SI ، شکل S6 ) برای توسعه و ارزیابی مدل جمع آوری کردیم. این مجموعه دادههای مرجع با وضوح فضایی خوب (کمتر از 10 متر) عمدتاً از دادههای تشخیص نور هوابرد و محدوده در ایالات متحده ( 21 ) و تصاویر استریو در اروپا ( 50 ) مشتق شدهاند. شایان ذکر است که از ارتفاعات ساخته شده مرجع 27 شهر در ایالات متحده و اروپا برای کالیبره کردن مدل ارتفاع ساخته شده شهری استفاده شد، در حالی که ارتفاع 10 شهر باقی مانده برای ارزیابی ارتفاعات تخمین زده شده از Sentinel-1 استفاده شد. داده ها.
داده های مرجع ثبت شده به عنوان شماره طبقه در 20 شهر چین (https://www.amap.com )؛ داده های ارتفاع مرجع در سائوپائولو، برزیل ( https://osmbuildings.org )؛ ونکوور، کانادا ( https://opendata.vancouver.ca )؛ و محصول شبکه بندی شده (10 متر) ارتفاع ساخته شده در آلمان به دست آمده از مشاهدات ماهواره ای ( 51 ) نیز به عنوان مجموعه داده های اضافی برای ارزیابی جمع آوری شد.
داده های مرز شهری
ما مرز مناطق شهری را با وضوح خوب (30 متر) در سال 2015 از مجموعه داده های مرز شهری جهانی جمع آوری کردیم ( 52 ). مناطق شهری تعریف شده در این مجموعه داده برای محاسبه زیرساخت سرانه برای کشورها و شهرستان ها و برای ترسیم مرزهای شهری شهرهای معرف استفاده شد.
داده های بانک جهانی
ما داده های جمعیت و تولید ناخالص داخلی هر کشور را در سال 2015 از بانک جهانی (https://data.worldbank.org ) جمع آوری کردیم. جمعیت برای محاسبه تولید ناخالص داخلی سرانه و زیرساخت های ساخته شده نشان داده شده در شکل ها استفاده شد. 3 و 4 . در مجموع، ما 159 کشور را مورد بررسی قرار دادیم که 45 کشور در شمال جهانی (به عنوان مثال، ایالات متحده و استرالیا) و 114 کشور در جنوب جهانی (مانند چین، مصر، هند) قرار دارند.
شمال جهانی و جنوب جهانی بر اساس ویژگی های اجتماعی-اقتصادی و سیاسی تعریف شده اند و کشورهای این دو گروه در مطالعات اندکی متفاوت هستند ( 53) .). در این مقاله، نام کشورهای جنوب جهانی که به آن دسته از کشورهای در حال توسعه اطلاق میشود که مجموعهای از آسیبپذیریها و چالشها را به اشتراک میگذارند، از برنامه توسعه سازمان ملل متحد به دست آمده است (54 ) .
داده های فضای طبقه ساختمان
ما سرانه فضای طبقه ساختمان های شهرستان های منتخب ایالات متحده را از آرهارت و همکاران جمع آوری کردیم. (39 ) برای کشف مفهوم ارتفاعات ساخته شده شهری در مدل سازی انرژی. با در نظر گرفتن شهرستان به عنوان واحد جغرافیایی، میانگین ارتفاع ساخته شده و درصد شهری (نسبت مساحت شهری در یک شهرستان به مساحت یک شهرستان) را محاسبه کردیم. 25 شهرستان برتر با مرتب سازی درصدهای شهری به ترتیب نزولی در ایالات متحده با مساحت کل شهرستان کمتر از 400 کیلومتر مربع انتخاب شدند تا اهمیت ارتفاعات ساخته شده را برجسته کنند.
داده های مصرف انرژی حمل و نقل شهری
ما از مجموعه داده مصرف انرژی مربوط به حمل و نقل ( 24 ) برای نشان دادن رابطه بین ارتفاع ساخته شده شهری و مصرف انرژی مربوط به حمل و نقل استفاده کردیم. این مجموعه داده شامل مصرف سرانه انرژی مرتبط با حمل و نقل در 31 شهر بود. میانگین ارتفاع ساخته شده برای هر شهر از ارتفاع ساخته شده شبکه بندی شده بر اساس مرز شهری محاسبه شد.
مواد و روش ها
نقشه برداری از ارتفاع ساخته شده شهری جهانی
ما ارتفاعات ساخته شده شهری را در سرتاسر جهان با استفاده از مدلی که قبلاً ( 21 ) بر اساس داده های Sentinel-1 GRD ایجاد کرده بودیم، تخمین زدیم. ما ارتفاع ساخته شده شهری را به عنوان ارتفاع متوسط در یک شبکه 500 متری در حوزه شهری، شامل ساختمان ها و غیرساختمان ها مانند خیابان ها و پارکینگ ها تعریف کردیم ( ضمیمه SI ، شکل S1 ). ابتدا، دادههای Sentinel-1 GRD (یعنی پراکندگیهای پسانداز از VV و VH) را در سال 2015 و دادههای ارتفاع ساختمان مرجع در 27 شهر از 37 شهر در ایالات متحده و اروپا (ضمیمه SI، شکل S6) را به 500- جمعآوری کردیم .
تفکیک متر، که با تجزیه و تحلیل حساسیت تفکیک پذیری از 100 متر تا 1 کیلومتر ( 21) تعیین شد.). برای کاهش تأثیر اشیاء مرتفع (به عنوان مثال، درختان)، ما مناطق غیر شهری را در دادههای Sentinel-1 GRD با استفاده از نقشه وسعت شهری از لایه سکونت انسانی جهانی پنهان کردیم (55 ) .
سپس، VVH، نشانگر ارتفاعات شهری، را با ادغام پراکندگی پسزمینه از اطلاعات دو قطبی (یعنی VV و VH) از دادههایSentinel-1 GRD در وضوح 500 متر استخراج کردیم (معادل 1 ) . در نهایت، ما مدل ارتفاع ساخته شده شهری را کالیبره کردیم ( معادل 2 ؛ به عنوان مثال، رابطه بین VVH و ارتفاع ساخته شده شهری تغییر یافته با ورود به سیستم):
VVH = VV*rVاچVVH=��*���[1]وln H = a * VVاچب+ ج ،ln �=�*����+�,[2]جایی که γ پارامتری برای مشخص کردن تاثیر نسبی VH بر VVH مشتق شده است،اچ�ارتفاع ساخته شده شهری تغییر یافته است وآ�،ب�، وج�ضرایبی هستند که باید در مدل ارتفاع شهری برآورد شوند.
در این مطالعه، γ طبق پیشنهاد لی و همکاران، 5 تعیین شد. ( 21 ). چنین مدل ارتفاع ساخته شده مبتنی بر فیزیکی می تواند برای تخمین ارتفاع ساخته شده شهری در سراسر جهان استفاده شود. ما مدل های ارتفاع ساختمان را با استفاده از داده های Sentinel-1 با مدارهای صعودی و نزولی، با پارامترهای کالیبره شده توسعه دادیم (به عنوان مثال،آ�،ب�، وج�) از -2.16، -0.45، 4.78، و -0.61، -0.79، و 2.31، به ترتیب. ارتفاعات نهایی جهانی که از ادغام نتایج مشاهدات صعودی و نزولی به دست میآید را میتوانید از https://figshare.com/s/7f2b254ed18fac8eb7a0 دانلود کنید .
ما ارتفاعات جهانی ساخته شده شهری را بر اساس سه شاخص ارزیابی کردیم: ضریب همبستگی، ریشه میانگین مربعات خطا (RMSE)، و میانگین خطای مطلق (MAE). ابتدا، ما یک اعتبارسنجی متقاطع با استفاده از داده های ارتفاع ساخته شده مرجع در 27 شهر از 37 شهر در 10 کیلومتری انجام دادیم.
××دامنه 10 کیلومتری در ناحیه شهری در ایالات متحده و اروپا ( ضمیمه SI ، شکل S2 ). داده های ارتفاع ساخته شده مرجع به طور تصادفی به 10 برابر تقسیم شد و هر بار از یک برابر برای ارزیابی استفاده شد. دوم، ما ارتفاع شهری برآورد شده را با استفاده از 10 شهر باقیمانده از 37 شهر در حوزه 10 کیلومتری 10 کیلومتری در ناحیه شهری ( ضمیمه SI ، شکل S3 )، و در کل منطقه شهری در تمام 37 شهر ارزیابی کردیم.
در نهایت، ما ارتفاع برآورد شده شهری را با استفاده از داده های مرجع شماره طبقات در 20 شهر در چین ( ضمیمه SI ، شکل S4 )، داده های مرجع ارتفاع ساختمان در سائوپائولو، برزیل ارزیابی کردیم. ونکوور، کانادا؛ و محصول ملی ارتفاع ساخته شده (10 متر) در آلمان از مشاهدات ماهواره ای (پیوست SI ، شکل S5 ).
ارتفاعات ساخته شده شهری جهانی مطابقت خوبی با داده های مرجع نشان می دهد و می تواند تغییرات ارتفاعات ساخته شده را به تصویر بکشد ( ضمیمه SI ، شکل S2 ). RMSE بین مرجع و ارتفاعات تخمینی ساخته شده شهری زیر 0.50 متر است و ضریب همبستگی بیشتر از 0.80 است ( ضمیمه SI ، شکل S3 ).
ارتفاعات ساخته شده شهری برآورد شده در چین نیز قابل اعتماد هستند، همانطور که توسط شاخص های RMSE و MAE با استفاده از داده های مرجع شماره طبقات نشان داده شده است ( ضمیمه SI ، شکل S4 )، با ضریب همبستگی کمی پایین تر به دلیل تفاوت بین تعداد و ارتفاع طبقه نتایج مشابه (یعنی RMSE: 0.37~0.47 و MAE: 0.40~0.49) در سائوپائولو، برزیل به دست آمد. ونکوور، کانادا؛ و آلمان (پیوست SI ، شکل S5 )، با استفاده از داده های مرجع ارتفاع ساختمان و محصول شبکه بندی شده ارتفاع ساخته شده از ماهواره ها.
فرم شهری با ترکیب تراکم 2 بعدی و ارتفاع 3 بعدی.
ما شهرهای جهان را بر اساس فضای ویژگی تراکم شهری دوبعدی (نفوذ ناپذیری) و همچنین ارتفاعات ساخته شده سه بعدی (میانگین و تغییرات درون شهر) به شش نوع گروه بندی کردیم (ضمیمه SI، شکل S11 ) . ما میانگین و ضریب چارک پراکندگی (QCD) ( معادل 3 ) ارتفاعات ساخته شده و همچنین میانگین سطوح غیرقابل نفوذ (ISA) در هر شهر را برای توصیف فرم شهری در ابعاد عمودی و افقی محاسبه کردیم:
( QCD ) =س3-س1س1+س3،(QCD)=�3−�1�1+�3,[3]جایی که س1 �1 و س3 �3 چندک اول (صدک 25) و سوم (صدک 75) ارتفاع ساخته شده در هر منطقه شهری است. QCD می تواند تغییرات ارتفاعات ساخته شده را در داخل شهر ثبت کند و همچنین بین شهرهایی با میانگین ارتفاعات مختلف قابل مقایسه است.
میانگین ISA می تواند نشان دهنده تراکم نفوذناپذیری کلی شهر باشد و از داده های ISA جهانی 30 متر محاسبه شد ( 56). ما آستانههای نفوذناپذیری، میانگین و QCD ارتفاعهای ساختهشده (ارتفاع میانگین: 3؛ QCD: 0.6؛ میانگین ISA: 0.75) را برای طبقهبندی شهرها در سطح جهانی به شش نوع، عمدتاً بر اساس توزیع دادههای هر ویژگی، تعریف کردیم.
هدف اصلی مقایسه شهرها و نشان دادن نمای کلی از منظر جهانی فرم شهری با در نظر گرفتن تراکم دو بعدی و ارتفاع سه بعدی است. این آستانه ها را می توان به راحتی برای طبقه بندی مجدد شهرهای جهان تنظیم کرد. ما دریافتیم که تنوع ارتفاعات ساخته شده در شهرهای مرتفع کم است.
بنابراین، ما انواع شهرهایی که هم بلند و هم در ارتفاعات ساخته شده ناهمگن باشند، نداشتیم. این شش نوع شهر عبارتند از (1) پراکنده و همگن کم، (2) متراکم و همگن کم، (3) پراکنده و ناهمگن کم، (4) متراکم و ناهمگن کم، (5) پراکنده و همگن بالا،سرانه و نابرابری زیرساخت های ساخته شده شهری در این تحقیق پیشنهاد شد که حجم ساخت و ساز شهری با ضرب مساحت و ارتفاعات شهری می تواند به عنوان نماینده ای برای زیرساخت های ساخته شده شهری در نظر گرفته شود.
ما زیرساخت های ساخته شده شهری را در هر شبکه محاسبه کردیم و همه پیکسل ها را در هر کشور جمع کردیم. درصد جمعیت انباشته و زیرساخت سرانه در هر کشور با استفاده از سوابق جمعیتی بانک جهانی محاسبه شد. در مجموع 159 کشور در سراسر جهان (آنهایی که دارای رکورد تولید ناخالص داخلی نیستند، مانند جمهوری دموکراتیک خلق کره [کره شمالی] حذف شدند) در شکلها مورد بررسی قرار گرفتند. 3 و 4 . در شکل 3، مساحت هر مستطیل نشان دهنده درصد کل زیرساخت های ساخته شده در هر کشور است.
ما همچنین رابطه بین زیرساخت سرانه و تولید ناخالص داخلی در هر کشور را با استفاده از داده های بانک جهانی بررسی کردیم.با استفاده از روش پیشنهادی Pandey و همکاران. ( 3 ) و برلسفورد و همکاران. ( 23 ) (یعنی معادله 4 ) ، ما شاخص نابرابری زیرساخت های ساخته شده شهری را محاسبه کردیم که می تواند سطح نابرابری فضایی در زیرساخت ها را در هر یک از 119 کشور اندازه گیری کند (با تعداد کل مناطق شهری مشخص شده توسط شهری 2015 داده های مرزی بزرگتر از 10) در جنوب و شمال جهانی:
من=پμ ( 1 – μ )——-√; 0 < μ < 1 ،�=��(1−�);0<�<1,[4]که در آن I شاخص نابرابری است که از 0 (کمترین نابرابری) تا 1 (بالاترین نابرابری) متغیر است.
متر�وپ�میانگین و SD، به ترتیب، توزیعهای زیرساختی ساختهشده هستند که توسط یک کران بالا در هر منطقه جغرافیایی محدود شدهاند. این شاخص بررسی میکند که چگونه ناهمگونیهای بین منطقهای ( ضمیمه SI ، شکلهای S8 و S12 ) با میانگین کلی توزیعهای زیرساختی که توسط یک کران بالا محدود میشود، متفاوت است ( 3) .). ما همچنین سه کران بالا (یعنی 90، 95، و 100 چندک در توزیعهای زیرساخت) را در محاسبه شاخص نابرابری آزمایش کردیم.
ابتدا، چندک های 90، 95 و 100 را از توزیع زیرساخت در هر منطقه جغرافیایی به عنوان سه کران بالا محاسبه کردیم. دوم، ما توزیعهای زیرساختی را در هر منطقه جغرافیایی ایجاد کردیم که توسط آن سه مرز بالا محدود شده بود. در نهایت، تحت هر کران بالایی محدود، SD (σ) و مقادیر میانگین (μ) برای محاسبه شاخص های نابرابری به دست آمد. نتایج ما تا حد بالایی متفاوت است، همانطور که در پیوست SI ، شکل S8 نشان داده شده است .
کدام عوامل در پذیرش آهسته TLS در نیجریه نقش دارند؟ این بینش ها می تواند به تحریک جذب ابزار دقیق و افزایش نقشه برداری حرفه ای در سایر کشورهای در حال توسعه در سراسر آفریقا کمک کند.
ابزار دقیق نقش مهمی در تئوری و عمل نقشه برداری زمین ایفا می کند. با این حال، پذیرش آهسته فناوری میتواند چالشهای مهمی را برای تمرین حرفهای ایجاد کند. این امر به ویژه در نیجریه مشهود است، جایی که استفاده از تکنیکهای نقشهبرداری پیشرفته مانند اسکن لیزری زمینی (TLS) کند بوده است.
فقدان تحقیق در مورد جنبههای خاصی که بر پذیرش فناوری مدرن TLS در کشورها و شهرهای مختلف تأثیر میگذارد، شکاف دانشی قابل توجهی است که تلاشها برای بهبود شیوههای نقشهبرداری را تضعیف میکند. برای پرداختن به این موضوع، نویسندگان این مقاله عواملی را که به پذیرش کند TLS در نیجریه کمک میکنند، مطالعه کردهاند. بینش به دست آمده از این تحقیق برای سایر کشورهای در حال توسعه در سراسر قاره آفریقا و فراتر از آن قابل استفاده است.
ابزار دقیق یکی از عناصر اساسی نقشه برداری زمین (LS) از دوران باستان بوده است. جمعیت های باستانی از ابزارهای ابتدایی متعددی برای درک زمین و ویژگی های آن و برای نشان دادن آنها به صورت گرافیکی برای عنوان، اهداف مالی و قانونی استفاده می کردند. مشخص شده است که آن ابزارهای اولیه در واقع پیشینیان ابزارهای معمولی LS امروزی مانند نوارها، تئودولیت ها و ایستگاه های توتال و تکنیک هایی مانند زنجیرزنی، روش پرتو و فتوگرامتری هستند.
با گذشت زمان، این روش ها و تجهیزات مورد استفاده به طور فزاینده ای دست و پا گیر شده و قادر به به دست آوردن داده ها با دقت مورد نیاز برای تعریف دنیای ارگانیک و ساخته شده با دقت مطلوب نیستند. علاوه بر این، رویکردهای سنتی LS میتوانند به نفوذ غیرضروری در یک سایت نیاز داشته باشند، بدون اینکه به بازه زمانی گسترده اجرای پروژه اشاره کنیم.
علاوه بر این، LS سنتی برای جمعآوری مجموعه دادههای مورد نیاز برای عملیات مدلسازی جنبههای پیچیده موجود در بسیاری از پروژههای امروزی مناسب نیست. در حالی که روشهای مرسوم LS فقط میتوانند نمونهبرداری نقطهای انجام دهند، اسکن لیزری زمینی (TLS) به لطف توانایی آن در نمونهبرداری سه بعدی و روی سطح با دقت بالا، راهحلی فناوری برای بسیاری از این چالشها ارائه میدهد.
پروژه TLS برای مدل سازی یک تاسیسات دریایی
اخیراً، یک بررسی مهندسی در نیجریه، ظرفیت TSL را برای تولید یک مدل سهبعدی، با استفاده از تلفیقی از درونیابیها برای تبدیل دادهها به مدلهای سطحی و رفع نواقص با روشهای سنتی جمعآوری دادههای LS، بررسی کرد. این فرآیند غیر نفوذی است و میلیون ها نقطه داده را با سرعت زیادی جمع می کند. این پروژه با هدف ساخت یک مدل ساخته شده – یک شباهت سه بعدی – از سکوی گاز دریایی برای کمک به برنامه ریزی و اجرای بهسازی و نوسازی تاسیسات بود. این پروژه از HDS Leica ScanStation-2 TLS (نگاه کنید به شکل 1) با ویژگی های زیر استفاده کرد:
موقعیت: 6 میلی متر (در محدوده 1 متر تا 50 متر، 1δ)
فاصله: 4 میلی متر (در محدوده 1 متر تا 50 متر، 1δ)
زاویه (افقی/عمودی): 0.003⁰(60μrad/60μrad).
جنبه های روش شناختی اصلی پروژه عبارت بودند از:
انتخاب مکان مناسب برای TLS و اهداف
مجوزهای مدیریت تاسیسات فراساحلی برای نمونه برداری
اسکن سیستماتیک تسهیلات برای گرفتن ابرهای نقطه سه بعدی
پردازش داده ها (شامل تصحیح خودکار، فیلترینگ ابر نقطه و مدل سازی و صادرات نقشه ها) ابر نقطه با استفاده از نرم افزار Cyclone 0.
شکل 1: HDS Leica ScanStation-2 TLS مورد استفاده برای مدل سازی سه بعدی پلت فرم گاز دریایی.
غلبه بر موانع
کار میدانی TLS با موانعی مواجه شد، عمدتاً شرایط نامطلوب که معمولاً با محیطهای دریایی مرتبط است، مانند بادهای تند و باران. بادهای شدید مانع از عملکرد اسکنر می شد و باعث می شد در هنگام حرکت با نسیم سریعتر از حد معمول حرکت کند و هنگامی که اسکنر در جهت مخالف قرار می گرفت مانع از پیشرفت آن می شد.
برای غلبه بر این مانع، تکنسین های میدانی اسکنر را در موقعیت هایی قرار دادند که بخش هایی از سکو از آن در برابر باد محافظت می کرد. هنگام اسکن در باران، قطرات باران انتخاب شده توسط Leica ScanStation 2 نویزهای اضافی را به داده ها وارد کردند که به عنوان سیگنال تفسیر می شد. در این حالت عملیات اسکن تا بازگشت شرایط مساعد جوی به تعویق افتاد. با وجود این موانع،
اگرچه ثابت شده است که TLS در پروژه فوق الذکر و همچنین در صنعت گسترده تر LS و ژئوماتیک بسیار مفید است، پذیرش آن در بسیاری از کشورهای جهان سوم کند بوده است. ادبیات دلیل قطعی برای جذب کند TLS در چنین کشورهایی ارائه نمی کند. بنابراین، نویسندگان یک نظرسنجی را در بین 81 نقشه بردار ثبت شده زمین در Enugu، نیجریه، با انواع تجربه، مدت زمان تمرین، مدارک تحصیلی و آگاهی از ابزار دقیق LS انجام دادند.
این نظرسنجی نشان داد که تنها حدود 3.7 درصد از پاسخ دهندگان از فناوری اسکن زمینی استفاده کرده اند. حدود 38٪ از پاسخ دهندگان نشان دادند که در مورد این فناوری شنیده بودند اما آن را ندیده بودند، در حالی که حدود 45.6٪ گفتند که آن را دیده اند اما از آن برای هیچ فعالیت عملی LS استفاده نکرده اند.
بر اساس داده ها، غالباً عملیات LS منظم، از جمله خدمات کاداستر، نقشه برداری مهندسی و مدیریت اطلاعات زمین (LIM) وجود دارد. اینها اغلب می توانند با استفاده از لجستیک اولیه بومی اجرا شوند. یافتهها بر شواهدی مبنی بر پذیرش آهسته TLS در منطقه مورد مطالعه تاکید میکند و نشان میدهد که عوامل مؤثر در این وضعیت شامل کمبود بودجه، ظرفیت فنی ضعیف و کاهش ارزش و دامنه کار منحصر به فرد متخصصان زمین سنتی است.
شکل 2: مدل سه بعدی پلت فرم گاز دریایی، اسکن شده توسط HDS ScanStation-2 TSL
مفاهیم و راه پیش رو
علیرغم انبوهی از مسائل مرتبط با ابزار دقیق LS موجود، مانند خرابی، عدم دقت قابل توجه و کمبود نیروی انسانی و تخصص فنی، به نظر می رسد رضایت کلی از ابزارها و شیوه های فعلی LS، همانطور که توسط مطالعه اندازه گیری شده است، به طور قابل قبولی بالا باشد. در واقع، اکثر نقشه برداران زمین در منطقه مورد مطالعه فکر می کنند که نیازی به TSL یا سایر تجهیزات نقشه برداری پیشرفته ندارند. با این وجود، آنها آماده دریافت و/یا حمایت مالی، سیاسی، سیاستی یا علمی هستند که نمایه حرفه ای فعلی و آینده نظریه و عمل LS را در منطقه تقویت می کند.
این امر بر اهمیت اساسی انتقال و پذیرش فناوری تأکید می کند و بر ارزش آموزش ابزار به عنوان یک شرط لازم برای توسعه حرفه ای اجباری مداوم (MCPD) برای نقشه برداران تأکید می کند. علاوه بر این، ارتقای وضعیت متخصصان LS منوط به انطباق با استانداردهای حرفه ای جهانی موجود است. این تنها در صورتی می تواند اتفاق بیفتد که نقشه برداران محلی مایل به پذیرش و استفاده از فناوری پیشرفته باشند. این امر چشمانداز رو به وخامت نقشهبرداری در Enugu را بهبود میبخشد، که همچنین به موضوعات مربوط به زنان در نقشهبرداری (WIS) و سیستم اطلاعات جغرافیایی جامع نیجریه میپردازد.
نتیجه
ابزار دقیق یک ویژگی اساسی نقشه برداری زمین برای اهداف مالی و مالکیت در طول تاریخ بوده است. TLS میتواند نیازهای امروزی را برای مجموعه دادههای مکانی بزرگتر و دقیقتر برآورده کند، فراتر از آنچه ابزارها و روشهای سنتی LS میتوانند انجام دهند. این ظرفیت لازم برای اکتساب سریع داده ها، مدل سازی دو و سه بعدی ساختارهای پیچیده را فراهم می کند و از انتقال و همکاری داده ها پشتیبانی می کند.
نتایج یک پروژه واقعی با استفاده از HDS Scanstaion-2 TLS برای مدلسازی یک سکوی گازی فراساحلی و ساختن نقشهای که در نیجریه ساخته شده است نشان میدهد که سیستم اسکن پاسخ مناسبی برای مشکلات جدید جهانی در کشورهای در حال توسعه است. اما علیرغم این پتانسیل، پذیرش TLS در اکثر آن کشورها با سرعت آهسته انجام می شود، همانطور که یک نظرسنجی در میان نمونه ای از نقشه برداران ثبت شده زمین در نیجریه نشان می دهد. از علل لحظه ای این امر می توان به کمبود بودجه برای خرید تجهیزات مدرن، نبود تخصص فنی و رو به زوال جایگاه حرفه نقشه برداری در منطقه اشاره کرد.
با این حال، ممکن است موارد بیشتری مطرح شود و تحقیقات بیشتری برای درک تمام جنبههای موضوع TLS در مناطق مختلف مورد نیاز است. این می تواند مبنایی برای توسعه ابتکارات و طرح هایی با هدف ارتقای موقعیت متخصصان زمین و بخش جغرافیایی در کشورهای در حال توسعه باشد.
بیشتر خواندن
Ebinne، ES، Nkwunonwo، UC، Nwaka، OC، و Chiemelu، NE (2022). پذیرش آهسته فناوری اسکن لیزری زمینی برای عملیات نقشه برداری زمین در صنعت اطلاعات جغرافیایی نیجریه. مجله مطالعات آسیایی و آفریقایی، 57 (2)، 369-387.
Pinkerton M (2011) اسکن لیزری زمینی برای نقشه برداری اصلی زمین. فصلنامه نظرسنجی 300 (65)، 7-20.
Trinder J and Han S (1999) تاثیر فناوری های جدید بر ژئوماتیک در سال 2010. نقشه بردار استرالیایی 44 (1) 29-34.
وانگ دبلیو، ژائو دبلیو، هوانگ ال، و همکاران. (2014) کاربردهای اسکن لیزری زمینی برای تونل ها: بررسی. مجله مهندسی ترافیک و حمل و نقل 1 (5)، 325–337.
Ecopia AI و Woolpert همکاری خود را برای نقشه برداری سه بعدی از مناطق شهری برتر استرالیا گسترش داده اند. نقشههای برداری بهدستآمده، یک لایه بنیادی دقیق، دقیق و بهروز از دادههای جغرافیایی را در اختیار مشتریان وولپرت در آسیا-اقیانوسیه قرار میدهد که دنیای ابعادی آنطور که میشناسیم را نشان میدهد.
Woolpert به عنوان یک ارائه دهنده خدمات مکانی پیشرو، با سازمان های دولتی و تجاری به طور یکسان برای نقشه برداری و تجزیه و تحلیل مکان ها برای تصمیم گیری استراتژیک کار می کند. در میان مشتریان آن، شهرداریهایی هستند که فناوری شهر هوشمند را برای تقویت جوامع پایدارتر و قابل زندگی توسعه میدهند، همچنین شرکتهای مخابراتی و مهندسی که زیرساختهایی را ایجاد میکنند که از جهانی دائماً در حال تغییر پشتیبانی میکنند.
تسریع ثبت واقعیت با هوش مصنوعی
این مشارکت گسترده بر اساس همکاری های قبلی Ecopia و Woolpert بنا شده است. در سال 2021، این دو شرکت با یکدیگر همکاری کردند تا شهر پرث را به صورت سه بعدی برای یک مرجع اطلاعات زمین ایالتی نقشه برداری کنند. از طریق آن تعامل، Ecopia از تصاویر هوایی با وضوح بالا Woolpert برای نقشهبرداری از تمام ساختمانهای Perth بهصورت سهبعدی، بهعلاوه پوشش زمین اطراف بهصورت دو بعدی استفاده کرد.
سیستمهای نقشهبرداری مبتنی بر هوش مصنوعی Ecopia توانستند این ویژگیها را تنها در 12 روز دیجیتالی کنند و 40 درصد در هزینهها صرفهجویی کنند. Woolpert و Ecopia در پروژههای دیگری نیز شریک شدهاند، نقشهبرداری از تشخیص تغییرات پیچیده در نیوزلند و تجزیه و تحلیل برای حمایت از محاسبات هزینه آب طوفان برای دولتهای محلی در استرالیا.
داده های جدید نقشه سه بعدی بیش از 70 درصد از جمعیت استرالیا از جمله مناطق شهری سیدنی، ملبورن، بریزبن و پرث را پوشش خواهند داد. Ecopia با استفاده از تصاویر هوایی با وضوح 10 سانتیمتری Woolpert و گردشهای کاری خودکار فتوگرامتری خود، 15 ویژگی طبقهبندی پوشش زمین، از جمله بردارهای سه بعدی برای ساختمانها، درختان و پلها را استخراج میکند.
برایان نیکولز، معاون آسیا و اقیانوسیه Woolpert توضیح داد: “ما از گسترش ارائه داده های سه بعدی خود در استرالیا از طریق همکاری مداوم با Ecopia خوشحالیم.” دادههای مکانی با کیفیت تمرکز اصلی Woolpert است، و Ecopia در توانایی آنها برای تولید دادههای سه بعدی بسیار دقیق و بهروز به طور کارآمد و مقرون به صرفه بینظیر است.
ابیگیل کولیک، مدیر ارشد مشارکت در Ecopia گفت: “به عنوان Ecopia، ما مفتخریم که همکاری خود را با Woolpert، یک رهبر ثابت شده در صنعت زمین فضایی ادامه داده و گسترش دهیم.” “تعهد آنها به دقت و نوآوری با ماموریت خود Ecopia برای دیجیتالی کردن جهان با استفاده از هوش مصنوعی هماهنگ است، و ما هیجان زده هستیم که به همکاری با یکدیگر ادامه دهیم و مشتریان آسیا-اقیانوسیه را با داده های مکانی با بالاترین کیفیت توانمند کنیم.”
نمونه ای از یک نقشه برداری سه بعدی که ملبورن را به نمایش می گذارد. (تصویر با حسن نیت: Ecopia AI)
از زمان انفجار Lidar در دو دهه گذشته، استفاده از ابرهای نقطه ای در برنامه های نقشه برداری هوایی این روزها رایج شده است. با این حال، لیدار بدون چالش نیست. این مقاله به بررسی این موضوع می پردازد که چگونه ابرهای نقطه رنگی از فتوگرامتری می توانند جایگزین ارزش افزوده ارائه دهند.
سه چالش اصلی مرتبط با استفاده از Lidar در نقشهبرداری هوایی همیشه هزینه سنسورها، منحنی یادگیری مورد نیاز برای تولید مجموعه دادههای دقیق، و آنچه باید با تمام این نکات در هنگام ارائه یک محصول تحویلی انجام شود، بوده است. سیستمهای لیدار هوابرد و سیستمهای موقعیتیابی که با آنها جفت میشوند، عمدتاً هنوز بسیار گران هستند. این به دلیل افزایش نرخ پالس و دامنه توسط تولید کنندگان برای پاسخگویی به تقاضای کاربر برای مجموعه داده های متراکم تر است، در حالی که تلاش می کنند اندازه و وزن کلی را کاهش دهند. در رقابت برای ماندن در رقابت، این اغلب باعث می شود خریداران احساس کنند که خوکچه هندی برای این سیستم های پیچیده تر هستند.
این واقعیت که Lidar به سیستمهای موقعیتیابی بسیار دقیق نیاز دارد، به پیچیدگی استخدام افراد دارای مهارت برای پردازش این مجموعه دادهها به طور مداوم در سطوح بالایی از دقت میافزاید. نیازی به گفتن نیست که منحنی یادگیری شیب دار است و آنهایی که در پردازش لیدار خوب هستند مورد توجه قرار می گیرند و قیمت بالایی دارند. با این حال، گزینه دیگری وجود دارد: فتوگرامتری.
تکامل فتوگرامتری
فتوگرامتری، توانایی ایجاد نقشه ها از روی همپوشانی تصاویر، تقریباً از زمان اختراع هواپیما وجود داشته است. برای مدت طولانی، به ماشینهای بزرگی به نام پلاتر استریو نیاز داشت تا به تکنسینها توانایی دیدن یک صحنه را به صورت استریو بدهند. این به آنها اجازه داد تا اطلاعاتی را که نمایانگر زمین و ویژگی ها در یک مقیاس معین است، ترسیم کنند. با افزایش قدرت محاسباتی در دهه 1980، فتوگرامتری دیجیتالی شد.
اندکی بعد، در اوایل دهه 2000، اصول فتوگرامتری امکان چشم پوشی از تجهیزات مشاهده استریو و استخراج مختصات XYZ برای هر پیکسل در تصویر را فراهم کرد که در آن همپوشانی رخ می دهد. این پیشرفت امکان تولید ابرهای نقطه ای بسیار دقیق را بدون هزینه سیستم لیدار فراهم کرد. با این حال، یک ابر نقطه ای مشتق از فتوگرامتری یک مزیت بالقوه اضافه دارد: مقادیر رنگ بدون اضافی.
در هر صورت، تحویل اولیه در پروژههای نقشهبرداری، مدلهای ارتفاعی دیجیتال (DEMs) باقی مانده است، زیرا ابرهای نقطهای از نظر اندازه فایل بسیار بزرگ هستند که کاربر معمولی نمیتواند با توجه به کمبود قدرت محاسباتی موجود از آن بهرهبرداری کند. با پیشرفتهای فناوری محاسباتی از جمله پردازندهها و پردازندههای گرافیکی قدرتمندتر، این موضوع در حال تغییر است. علاوه بر این، بسیاری از بسته های نرم افزاری محبوب می توانند داده های ابر نقطه ای را برای پردازش یا تجسم بیشتر مصرف کنند.
مزایای ابرهای نقطه رنگی
بنابراین چه فایده ای از یک ابر نقطه رنگی حاصل می شود؟ با نگاه کردن به یک مثال از هر یک به راحتی به این موضوع پاسخ داده می شود. بدون مرحله اضافه طبقهبندی یا رنگآمیزی، شناسایی ویژگیهای پنهان در اعماق ابر نقطه Lidar مقداری تلاش میکند. در مقابل، یک فرد معمولی می تواند به سرعت ویژگی های یک ابر نقطه رنگی مشتق شده از فتوگرامتری را شناسایی کند.
ابر نقطه اصلیابر نقطه رنگی
ابر نقطه ای ایجاد شده از Lidar در واقع می تواند رنگی شود. با این حال، این فقط به هزینه کلی می افزاید، زیرا نیاز به دوربین در حال کار در زمانی که لیدار در حال به دست آوردن است، پنجره خرید یا پرواز دوم بر فراز همان منطقه را به خطر می اندازد. هر یک از این روشها منجر به طولانیتر شدن زمان کسب کلی و پردازش بیشتر میشود.
بستههای نرمافزاری وجود دارند که ابرهای نقطهای را به عنوان مشتق از فرآیند مثلثسازی هوایی ایجاد میکنند. سپس آنها DEM ها را از تعداد کم شده نقاط در آن ابر نقطه تولید می کنند. این تمایل به ایجاد DEM های بسیار بی کیفیت به طور کلی دارد و بسیاری از نقاط ایجاد شده اولیه را حذف می کند. این همچنین اعتبار سنجی را برای کاربران نهایی دشوار می کند زیرا ایجاد DEM مرحله دیگری از فرآیند مثلث بندی هوایی است.
چالش های مرتبط با رنگ آمیزی
یک راه متداول برای تولید ابرهای نقطه رنگی از فتوگرامتری، ایجاد یک DEM، سپس صادر کردن یک ابر نقطه از آن DEM است که در آن هر پیکسل به عنوان یک نقطه نمایش داده می شود. سپس با استفاده از یک ارتوموزائیک، مقدار رنگ متناظر مستقیماً روی هر نقطه نمایش داده می شود. این به خوبی کار می کند – اما فقط در یک نمای نادر، زیرا یک ابر نقطه ای ایجاد شده از یک DEM به این روش، نقاط عمودی یا مایل را در نظر نمی گیرد. در نتیجه، حفره های عمودی و مایل در مجموعه داده ذاتی هستند. جایی که هیچ نقطه ای وجود ندارد، رنگی وجود ندارد.
در حالی که اکثر ابزارهای نرم افزاری این رویکرد ساده را برای رنگ آمیزی اجرا می کنند، یک راه حل بهینه ایجاد ارتباط بهتر بین پیکسل ها و نقاط است. سپس، با این حال، بسیاری از پیکسل ها برای یک نقطه ممکن است مقادیر رنگی کمی متفاوت داشته باشند. این بدان معناست که الگوریتم ها باید این اطلاعات را محاسبه و ادغام کنند. مسئله دیگری که پیش می آید مشابه تعادل رنگ در موزاییک است، اما در اینجا موزاییک سه بعدی است. بنابراین الگوریتم های پیشرفته برای انجام این کار برای اطمینان از ثبات در سراسر ابر نقطه مورد نیاز است. محصولات فتوگرامتری موجود در حال حاضر از چنین عملکردهای پیشرفته ای پشتیبانی نمی کنند.
پیشرفت های اخیر فناوری
SimActive اخیراً نسخه 10 مجموعه فتوگرامتری Correlator3D خود را معرفی کرده است تا امکان رنگآمیزی ابرهای نقطهای را فراهم کند. در طول فرآیند ایجاد ا بر نقطه ای، تمام پیکسل هایی که از تصاویر همپوشانی مختلف (عمودی و/یا مورب) به دست می آیند، ابتدا برای استخراج یک مختصات سه بعدی دقیق استفاده می شوند.
سپس با استفاده از الگوریتم های پیشرفته، Correlator3D مقادیر رنگ های مختلف را از تصاویر مرتبط تجزیه و تحلیل می کند و یک مقدار رنگ نهایی را محاسبه می کند. این منجر به یک ا بر نقطه ای با ظاهری بسیار واقعی می شود که رنگ های ثابتی را از همه زوایای دید نمایش می دهد.
مزایای چنین فناوری چندگانه است. این امکان تولید یک ابر نقطه ای مشابه لیدار را فراهم می کند. تنها یک فعالیت جمع آوری داده ها ضروری است که منجر به صرفه جویی در هزینه و محصولات قابل تحویل بیشتر می شود. داشتن تنها یک مجموعه داده برای پردازش نیز سریعتر، آسانتر و سریعتر است. علاوه بر این، تضمین می کند که هیچ چالش و مشکلی در ثبت نام وجود نخواهد داشت، همانطور که در مورد ادغام Lidar با تصاویر وجود دارد.
ابر نقطه رنگی ایجاد شده توسط Correlator3D نسخه 10ابر نقطه ای یک جاده
آینده ابرهای نقطه ای
از آنجایی که ابرهای نقطه ای به یک محصول ارائه شده در نقشه برداری رایج تر تبدیل می شوند، متخصصان نقشه برداری باید سطح راحتی کاربر نهایی را با آنها در نظر بگیرند. یک ابر نقطه طبقه بندی شده مطمئناً دارای ارزش است و امکان شناسایی سریع زمین در مقابل پوشش گیاهی و غیره را فراهم می کند، اما یک ابر نقطه رنگی آن را به سطح دیگری می برد. به عنوان مثال، یک ابر نقطه طبقه بندی شده، کاربر را از وجود و مکان یک تابلوی راه آگاه می کند.
یک ابر نقطه رنگی اطلاعاتی را در مورد آنچه علامت می گوید اضافه می کند. این نه تنها تفسیر انسان را آسانتر میکند، بلکه به پیشرفت در مسیر به سمت یادگیری ماشینی و هوش مصنوعی (AI) بیشتر کمک میکند. شناسایی ویژگیهای دنیای واقعی از طریق یادگیری ماشین و استخراج اطلاعات ارزشمند از مجموعه دادهها از طریق هوش مصنوعی در حال انجام است.
تابلوی راه قابل مشاهده استبه لطف رنگبندی، بهعنوان علامت جادهای با محدودیت سرعت قابل شناسایی اس
راه حل Locator One برای اندازهگیری دقیق مبتنی بر GNSS به شرکتهای ساختمانی و زیرساختی متعددی در هلند و بینالمللی فروخته و اجاره شده است. این به طور مشترک توسط یک شرکت متخصص در جمع آوری و تجزیه و تحلیل داده های نقشه برداری و تصاویر، و ارائه دهنده راه حل های اینترنت اشیا (IoT) برای ردیابی و سنجش توسعه داده شده است. مجموعهای از تخصصهای فردی و دانش بازار آنها منجر به ایجاد Basetime، یک استارتآپ نوآور، در سال 2021 شد.
حرکات کوچک در اشیاء یا زمین ممکن است بی ضرر به نظر برسند، اما در مورد حرکت بیش از حد (که به عنوان “تغییر شکل” برای دارایی ها و “ته نشین شدن” برای زمین نیز شناخته می شود)، عملکرد یک شی ممکن است به خطر بیفتد. در بدترین حالت – مانند پل هایی که دیگر نمی توان آنها را بست، یا رانش زمین – حتی می تواند منجر به فاجعه شود.
به همین دلیل است که تقاضا برای داده های دقیق در مورد حرکات جسم و زمین در حال افزایش است. برای ایمنی بیشتر و درک تغییر شکل و نشست، داده های حرکتی بسیار دقیق مورد نیاز است. Basetime وظیفه ایجاد انقلابی در مجموعه دادههای ژئودزیکی با دقت بالا را بر عهده گرفت و در نتیجه یک ایستگاه نظارت سه بعدی مستقل با کیفیت بالا و قابل اعتماد به نام Locator One ایجاد کرد.
دقت نظارت زیر سانتی متری سه بعدی
The Locator One اولین دستگاهی است که توسط Basetime ساخته شده است . برای اندازه گیری دقیق مبتنی بر GNSS در نظر گرفته شده است. این دستگاه برای شرکت های ساختمانی، نقشه برداران، شرکت های دریایی، مهندسین ژئوتکنیک و سازه، و مدیران دارایی با وظایف پیچیده نظارت بر حرکت توسعه داده شده است. برای دستیابی به دقت نظارت زیر سانتیمتری سه بعدی، میتوان آن را روی یک دارایی یا یک میله نشست در صورت نظارت زمینی نصب کرد.
Locator One شامل GNSS، شتابسنج، دماسنج و حسگرهای رادار برای نظارت بر هر حرکت دو بعدی یا سه بعدی یک دارایی یا زمین با دقت در ارتفاع 5 میلیمتری (Z) و 3 میلیمتر افقی (XY) است. دادههای ضعیف یا ناقص بهطور خودکار توسط الگوریتم فیلتر میشوند، که معمولاً منجر به قابلیت اطمینان 95٪ داده میشود. علاوه بر این، تمام حرکات و موقعیت ها را می توان در مختصات مطلق سه بعدی، در هر سیستم مختصات محلی تحویل داد.
Locater One یک سیستم نظارت مستقل مبتنی بر GNSS با دقت زیر سانتی متری و زمان به عنوان بعد چهارم است. (تصویر با احترام: Basetime)
برنامه های بی پایان
در اصل، Locator One فقط برای نظارت بر نشست با نصب آن بر روی میله نشست استفاده می شد. شرکت های بزرگ ساخت و ساز و لایروبی از اولین کسانی بودند که از این راه حل برای نظارت بر سایت های جدید ساخته شده، جاده ها، دایک ها، زمین های لایروبی، انبارهای خاکی و سایت های ساختمانی استفاده کردند. اما دستگاه را می توان روی یک دارایی مانند ساختمان یا پل نیز نصب کرد و امکانات آن بی پایان است.
نقشه برداران و مدیران دارایی اکنون از Locator One برای نظارت بر ساختمان ها و توده های زمین ناپایدار مانند کوه ها و فرسایش خاک استفاده می کنند. نمونه های دیگر از کاربردها شامل نظارت بر دیوارهای حائل، سطح آب، رانش زمین و معادن روباز است. در واقع این دستگاه حتی به اندازه کافی همه کاره است تا در مواقع زلزله از آن استفاده شود.
داده در نوک انگشتان شما
اندازهگیریها در مُهرهای زمانی از پیش تعریفشده، از یکبار در روز تا یکبار در ساعت – یا حتی در صورت لزوم، بیشتر انجام میشوند. این دستگاه ها مشاهدات و ابرداده های خود را از طریق شبکه اینترنت اشیا به ابر Basetime ارسال می کنند. پس از چندین تنظیم و محاسبات ژئودتیکی، داده ها تحویل داده می شود. نتایج در داشبورد Basetime یا در محیط ترجیحی دیگری از طریق یک API نمایش داده می شوند. این امکان را برای متخصصان زمین فضایی فراهم می کند تا تمام اطلاعات را از پشت میز خود یا روی یک دستگاه تلفن همراه مطابق با روش کاری ترجیحی مشتری تجزیه و تحلیل کنند.
یک راه حل پایدار و مقرون به صرفه
Locator One بدون باتری کار می کند و در حین استفاده از کربن خنثی است. از آنجایی که این رویکرد به این معنی است که تعداد بسیار کمی نقشه بردار برای انجام اندازه گیری های نشست زمینی مورد نیاز است، راه حل ایمنی محل ساخت و ساز را افزایش می دهد. همچنین دسترسی و مقرون به صرفه بودن نقشه برداران را با اجازه به کارگیری آنها برای فعالیت های با ارزش بیشتر به حداکثر می رساند.
علاوه بر مزایای پایداری، اتوماسیون و صرفه جویی در نیروی کار ذکر شده، Locator One داده های بسیار قابل اعتمادی را ارائه می دهد. ترکیبی از اندازهگیریهای دقیق در یک زمان از پیش تعریفشده، پایهای را برای پیشبینی قابل اعتماد رفتار استقرار افزایش میدهد. در نتیجه، مهندس زمین فضایی خیلی زودتر دید واضحی از دوره تثبیت به دست می آورد و می توان خاکریزها را با دقت بیشتری و در نتیجه اغلب زودتر قرار داد، در نتیجه در زمان ساخت و ساز با ارزش صرفه جویی می شود.
پروژه های متعدد Basetime نشان داده اند که این امر پروژه ها را برای تحویل زودتر تسریع می کند، که به طور قابل توجهی به نتیجه پروژه و همچنین به طور مستقیم به صرفه جویی در انتشار گازهای گلخانه ای کمک می کند. آخرین اما نه کم اهمیت، نصب و استفاده Locator One بسیار آسان است و بسیار مقرون به صرفه است، چه خریداری شده باشد و چه اجاره.
نمایش نتایج اندازه گیری که توسط دستگاه Locator One انجام می شود. (تصویر با احترام: Basetime)
تغییر بازی نظارت
به عنوان سرمایهگذاری مشترک یک شرکت پیشرو در توسعه اینترنت اشیا و یک ارائهدهنده خدمات زمینشناسی خبره، Basetime قصد دارد تا با ایجاد بهترینهای هر دو جهان، بازی نظارت را تغییر دهد. نام شرکت ترکیبی از “پایه” به علاوه “زمان” است: دو عنصر مورد نیاز برای به دست آوردن اندازهگیریهای دقیق GNSS در مُهر زمانی لازم. این استارت آپ مستقر در هلند یک راه حل کامل شامل دستگاه، پایگاه داده، داشبورد و پشتیبانی و خدمات مداوم ارائه می دهد.
گسترش شبکه فروشندگان
اولین فروشنده ای که با Basetime ثبت نام کرد Boels در هلند – یکی از بزرگترین شرکت های اجاره ماشین آلات و ابزار در اروپا – با تمرکز ویژه بر اجاره و اجاره دستگاه های Locator One بود. از آن زمان، این شرکت همچنین نمایندگی هایی را در آلمان و بلژیک منصوب کرده است و در حال گفتگوهای پیشرفته با شرکای حرفه ای متعدد در سطح جهانی است. Basetime که اخیراً بودجه قابل توجهی را جذب کرده است، اکنون به سرعت در حال گسترش شبکه فروش جهانی خود به عنوان گام بعدی در مسیر تحقق جاه طلبی های خود است.
مارتین آرکستاین، مدیرعامل این شرکت میگوید: «توسعه سریع محصول و خدمات و همچنین تمرکز بیشتر بر گسترش بینالمللی از طریق نمایندگیها و شرکا به ما این امکان را میدهد تا به مشتریان خود خدمات بهتری ارائه دهیم و به بازارهای جدید در سطح جهانی برسیم. ما همچنان به دنبال شرکت هایی برای پیوستن به شبکه نمایندگی های ما هستیم.
ثابت می کند که Locator One نه تنها برای اندازه گیری صفحه نشست بلکه برای کاربردهای مختلف دیگر بسیار ارزشمند است. (تصویر با احترام: Basetime)
طرح Web Mercator از یک نسخه اصلاح شده از طرح Mercator استفاده می کند و به یک پیش بینی نقشه پیش فرض برای نقشه برداری وب تبدیل شده است.
تفاوت عمده بین این طرح این است که از یک فرمول کروی در تمام مقیاس ها استفاده می کند.
در حالی که برجستگی مرکاتور از یک برجستگی استوانه ای عمودی جهت مماس بر استوا استفاده می کند.
در اینجا برخی از دلایلی وجود دارد که چرا پیشبینی Web. Mercator به استاندارد واقعی برای نقشهبرداری وب و آنلاین تبدیل میشود.
کدام نقشه های وب از Web Mercator استفاده می کنند؟
Web Mercator همه جا هست. تقریباً همه ارائه دهندگان بزرگ نقشه آنلاین از این طرح استفاده می کنند، از جمله Google Maps ، CARTO، Mapbox، OpenStreetMap ، Esri، و بسیاری دیگر.
اما چرا؟
به غیر از جهت گیری شمال به سمت بالا، Web Mercator برای نمایش تعاملی در نقشه وب بسیار مناسب است.
اگرچه اعوجاج آشکاری در مناطق قطبی در عرض های جغرافیایی بالا وجود دارد، اما برای مشاهده منطقه محلی اعوجاج کمی دارد.
با این حال، Google Maps و Google Earth اکنون به جای استفاده از Web Mercator در مقیاس های کوچک که شبیه شکل واقعی زمین است، یک طرح جهانی «جهانی» دارند.
چرا از Web Mercator استفاده کنیم؟
دلیل اصلی این است که برآمدگی مرکاتور جهت را حفظ می کند. مهم نیست در کجای جهان هستید که از این طرح استفاده می کنید، دستورالعمل ها درست هستند.
از نقطه نظر کاربر، دانستن اینکه شمال بالا است، بسیار مفید است. اگرچه نواحی تحریف میشوند، اما به طور نسبتاً یکنواختی در سراسر اعوجاج دارد . بعلاوه، شکل یا زوایای موضعی را حفظ نمی کند (همسان نیست).
با دور شدن از خط استوا، اعوجاج افزایش می یابد. مانند برآمدگی مرکاتور، نواحی به سمت قطب ها کشیده می شوند . این بدان معنی است که شما نباید از این طرح برای نمایش قطب ها استفاده کنید.
به دلیل اعوجاج های ظاهری، طرح Web Mercator نیز برای هیچ گونه تحلیل فضایی یا محاسبات منطقه مناسب نیست .
شناسه EPSG
شناسه EPSG برای طرح Web Mercator EPSG:3857 است . اما EPSG:4326 و EPSG:900913 نیز به این طرح اشاره دارند.
بعد چه می شود؟
پروجکشن Web Mercator یک گونه از Mercator، “کره کمکی Mercator” است.
اگرچه نواحی در مناطق قطبی را تحریف می کند، اما به استاندارد واقعی برای نقشه برداری وب از هر نوع تبدیل شده است و برای نقشه های بزرگ مقیاس (محلی) در اینترنت مفید است.
اگرچه این پیش بینی مزایای فراوانی دارد، اما برای هر نوع تحلیل فضایی یا محاسبات مساحتی مناسب نیست
بیشتر نقشههای وب آنلاین اصلی از این نوع نقشهبرداری از جمله Google، OpenStreetMap و Mapbox استفاده میکنند.
سایت Geonline، سایتی مرجع برای مرتفع نمودن نیاز علاقمندان، پژوهشگران، دانشجویان و دانش آموزان در حوزه جغرافیا است که برای تمامی سنین و سطوح مطالب کاربردی دارد.







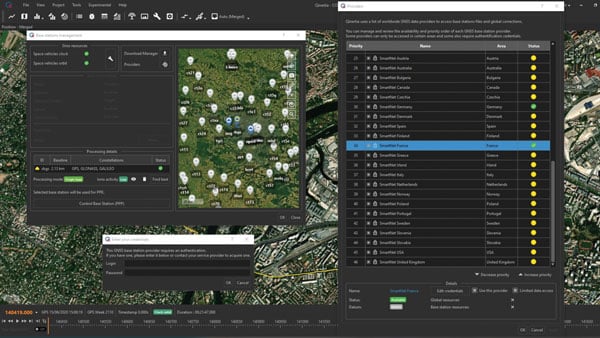



































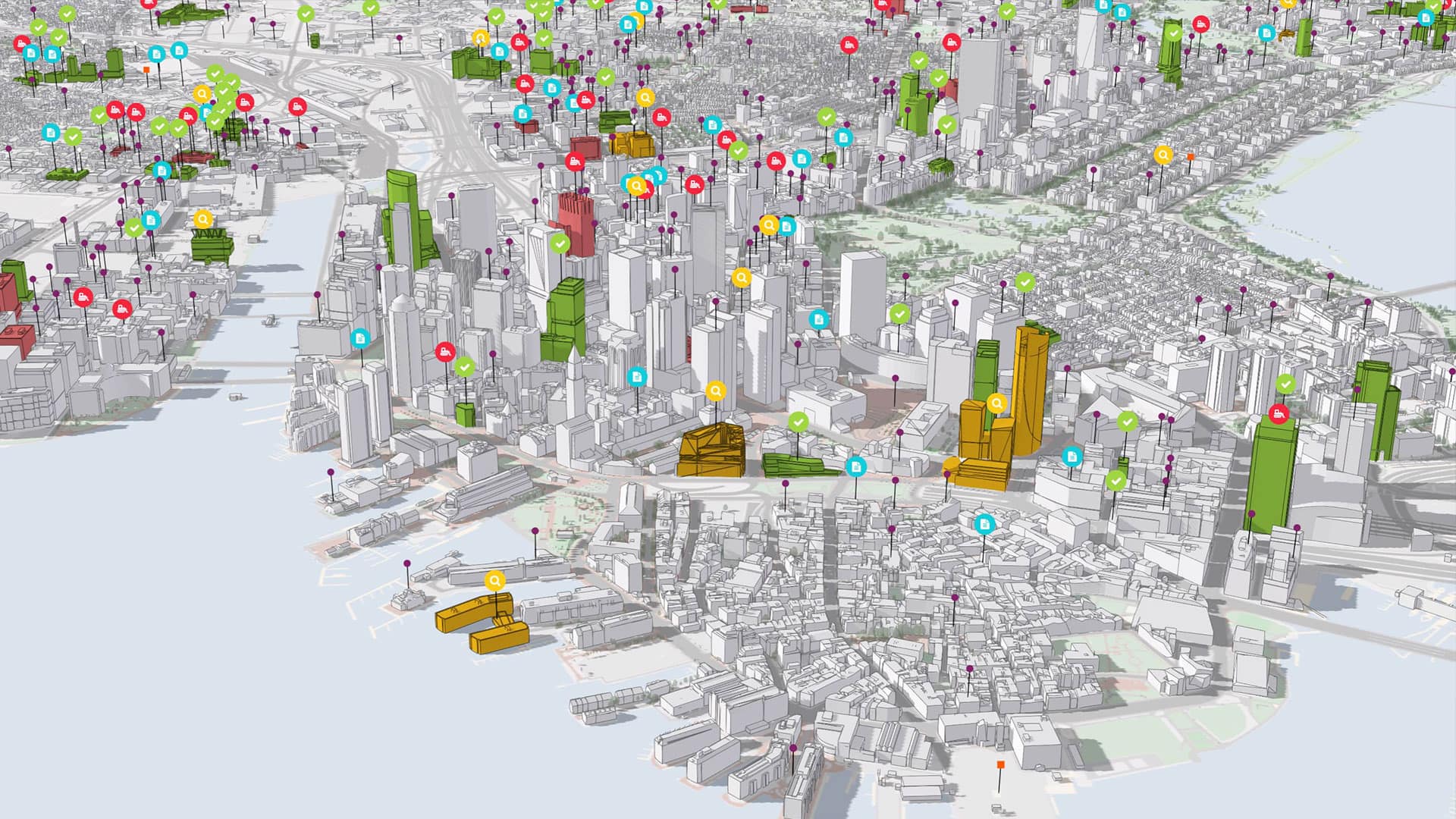








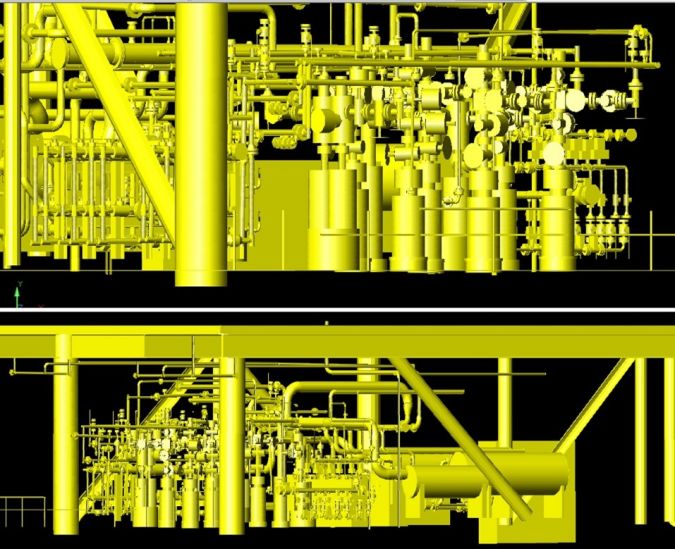
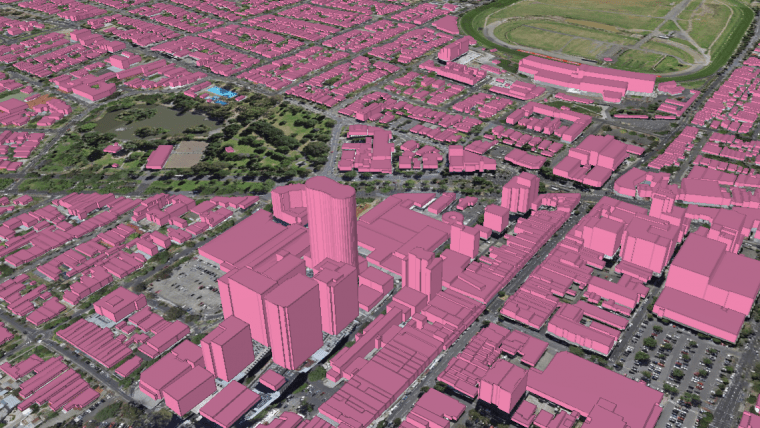

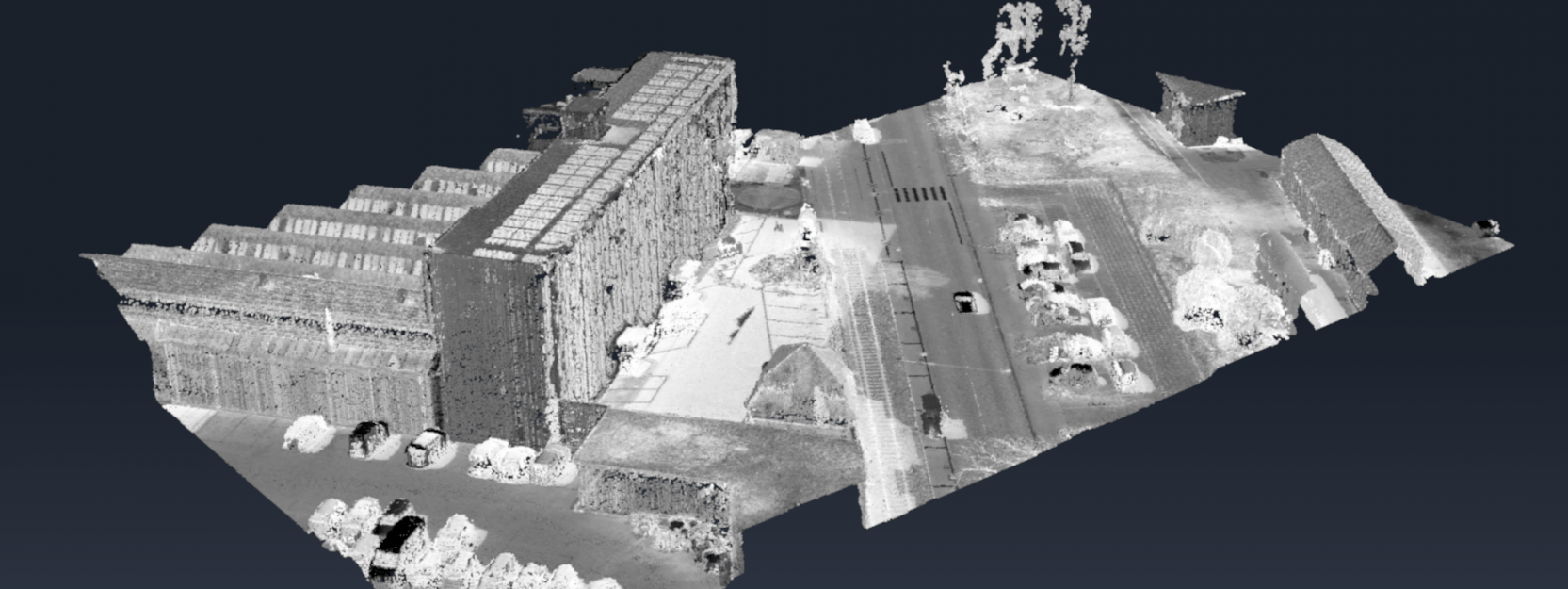






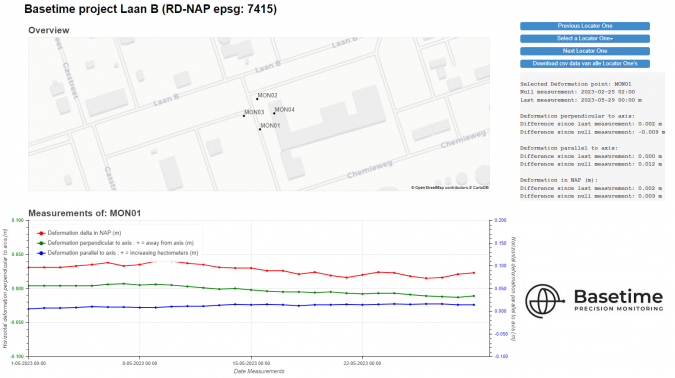


{kind=link}