



وقتی صحبت از نظارت بر وضعیت جادهها میشود، فناوری پهپاد میتواند بر بسیاری از معایب مرتبط با روشهای سنتی غلبه کند که میتواند زمانبر، کار فشرده و گاهی ذهنی باشد. این مقاله فرصتهایی را برای استخراج خودکار اطلاعات دادههای مبتنی بر پهپاد در مورد ساخت و ساز جاده، موجودی و محیطهای جاده بررسی میکند.
جاده یکی از شاخصه های شهری است. آنها فواصل طولانی را به طور مؤثر، سریع، راحت و ایمن به یکدیگر متصل می کنند. بنابراین، شرایط فعلی آنها باید نظارت شود تا از مطابقت با استانداردها اطمینان حاصل شود. با این حال، روش های سنتی برای نظارت بر وضعیت جاده ها زمان بر، کار فشرده و گاهی ذهنی هستند.
یک روش نسبتاً جدید برای نظارت بر وضعیت جاده، فناوری وسایل نقلیه هوایی بدون سرنشین (UAV یا “پهپاد”) است. پهپادها یکی از سریعترین فناوریهای در حال رشد در زمینههای مختلفی مانند کشاورزی و کشاورزی دقیق، جنگلها، نظارت بر سلامت اکولوژیکی و ساختاری و نقشهبرداری زمینشناسی، توپوگرافی و باستانشناسی هستند.
داده های مبتنی بر پهپاد با پرواز پهپاد بر فراز منطقه مورد مطالعه و گرفتن تصاویر متعدد جمع آوری می شود. در کنترل از راه دور پهپاد دو نوع مختلف از برنامه های پروازی، یعنی برنامه های پرواز دستی و خلبان خودکار وجود دارد. هر دو طرح مزایای خاص خود را دارند. طرح پرواز خلبان خودکار برای جمع آوری داده ها ساده است.
برنامه پرواز از راه دور در رابط تنظیم می شود و پهپاد پرواز می کند و داده ها را به طور خودکار دریافت می کند. با این حال، برنامه پرواز باید با توجه به ویژگی های سکوی پهپاد تنظیم شود که حداکثر زمان پرواز، سرعت پرواز، ارتفاع از سطح زمین و فاصله افقی است.
کسب، پردازش و مشاهده داده های پهپاد
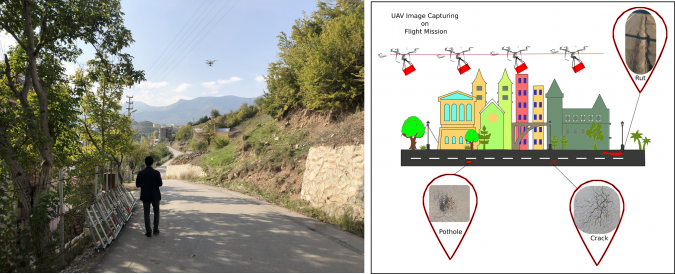
برنامه پرواز خلبان خودکار ممکن است به دلیل زمین یا شرایط سخت منطقه مورد مطالعه، مانند داشتن شیب های تند یا داشتن کابل ها و تیرها، سازه ها یا درختان خط برق بالای سر، مناسب نباشد. در این موارد، پرواز دستی ممکن است به دلایل ایمنی بهتر باشد. علاوه بر این، دو نوع مختلف تصویر – تصاویر نادر و مایل – را می توان با استفاده از فناوری UAV ثبت کرد (شکل 1 را ببینید).
تصاویر مایل کیفیت مدل سه بعدی (3 بعدی) را به خصوص در ساختارهای عمودی افزایش می دهد. دوربین روی پهپاد یکی دیگر از اجزای مهم برای جمع آوری داده های با کیفیت بالا است و مشخصات دوربین به طور مستقیم بر کیفیت تصاویر گرفته شده تأثیر می گذارد. تصاویر دو بعدی (2 بعدی) به دست آمده را می توان برای نظارت بر شرایط جاده استفاده کرد. با این حال، آنها ممکن است از نقشه برداری دقیق پشتیبانی نکنند زیرا تصاویر منفرد هیچ اطلاعات عمقی ارائه نمی دهند.
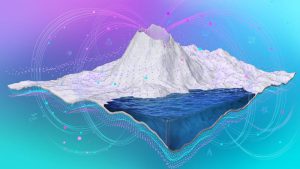
مدل های سه بعدی را می توان از تصاویر دو بعدی نیز تولید کرد. اکثر پهپادها معمولاً دارای سیستم ماهوارهای ناوبری جهانی (GNSS) و حسگرهای واحد اندازهگیری اینرسی (IMU) هستند که مکانهای دوربین را با دقت در سطح سانتیمتری ارائه میکنند. بنابراین، مدل سه بعدی را می توان با استفاده از تکنیک های ساختاری از حرکت (SfM) تولید کرد. تکنیک SfM نقاط پیوندی را در هر تصویر پیدا می کند که می تواند در تصاویر متوالی مطابقت داشته باشد. علاوه بر این، مکان ها و جهت گیری های دوربین نیز با استفاده از معادلات فتوگرامتری تخمین زده می شوند.
در نهایت، ابرهای نقطه سه بعدی شی مورد نظر را می توان بازسازی کرد. چندین گزینه نرم افزار تجاری کاربرپسند (Pix4D Mapper، Agisoft Metashape، 3Dsurvey، UASMaster، Photomodeler، و غیره) و نرم افزار منبع باز (VisualSFM، MicMac، COLMAP، و غیره) برای تبدیل تصاویر دو بعدی به ابرهای نقطه سه بعدی با استفاده از تکنیک SfM وجود دارد.
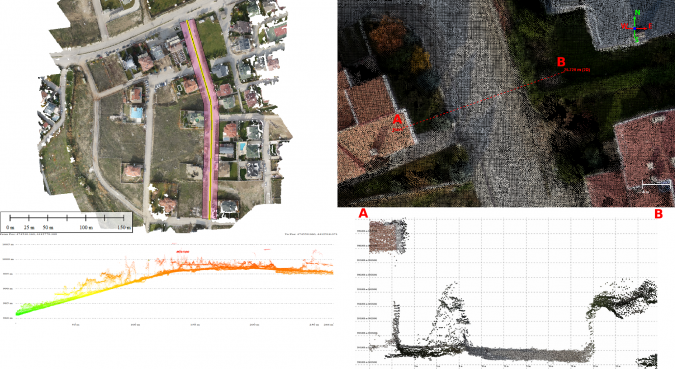
علاوه بر این، ارتوموزائیک، مدل های دیجیتال سطح (DSM) و مدل های دیجیتال زمین (DTMs) را می توان با استفاده از چنین نرم افزارهایی تولید کرد. این خروجی ها را می توان با استفاده از نرم افزارهای مختلفی مانند Quick Terrain Modeller و Global Mapper مشاهده کرد (شکل 2 را ببینید).

استخراج اطلاعات جاده از داده های پهپاد
اطلاعات جاده مانند سطح جاده، خط مرکزی و خط کشی خطوط، مشخصات، مقاطع عرضی و مشکلات را می توان از ابرهای نقطه سه بعدی استخراج کرد. این بینش در مورد وضعیت جاده برای بهبود عملکرد جاده، راحتی و ایمنی قابل توجه است. برای جمع آوری اطلاعات راه، ابتدا سطح راه باید از سایر اشیاء شهری یا روستایی متمایز و طبقه بندی شود.
الگوریتم های یادگیری ماشینی مانند Random Forest را می توان برای طبقه بندی سطوح جاده ها استفاده کرد و این الگوریتم ها نتایج طبقه بندی را هم سریع و هم با دقت بالا تولید می کنند. هنگامی که سطح جاده طبقه بندی شد، سایر اطلاعات هندسی را می توان به راحتی استخراج کرد.
خط کشی و خط وسط جاده معمولاً برای مدلسازی جاده، برنامه ریزی و ایمنی استفاده می شود. علاوه بر این، این اطلاعات برای اهداف ناوبری، به ویژه در زمینه رانندگی خودکار در آینده نزدیک، به طور فزاینده ای مهم خواهد بود. اگر خطوط جاده با استفاده از یک رنگ خاص (بیشتر سفید یا زرد) مشخص شده باشند، می توان آنها را مستقیماً با استفاده از ویژگی RGB استخراج کرد.
مقادیر RGB رنگ مدل سه بعدی را بیان می کنند و با استفاده از تصاویر از نرم افزار پردازش تصویر منتقل می شوند. در برخی موارد، به ویژه در جاده های محلی، خطوط جاده ممکن است با رنگ خاصی مشخص نشده باشند یا خط کشی های جاده آسیب دیده و پیوسته نباشند. در چنین مواردی، چندین روش – مانند الگوریتمهای بهبود یافته مبتنی بر نمودار Voronoi – میتواند برای استخراج خط وسط جاده و خطها با استحکام و دقت بیشتری معرفی شود.
«پروفایل جاده» به بخش عمودی گرفته شده در امتداد محور تراز (خط مرکزی) جاده اشاره دارد. تجزیه و تحلیل شیب جاده مهم است زیرا در صورت یخ زدگی می تواند منبع خطر باشد.
پروفایل های جاده را می توان از طریق DSM استخراج کرد. داده های DSM را می توان از ابرهای نقطه سه بعدی با استفاده از الگوریتم های درون یابی مختلف تولید کرد. یکی از متداول ترین الگوریتم های درون یابی، وزن معکوس فاصله (IDW) است. مقادیر ارتفاع به صورت شطرنجی در DSM ثبت می شود. سپس، بعد Z خط مرکز جاده از DSM استخراج می شود تا مشخصات جاده را به راحتی و با دقت به دست آوریم (شکل 3 را ببینید).
مقاطع عرضی جاده ایجاد یک سکوی جاده با شیب های خاص عمود بر خط مرکزی راه را فراهم می کند. همچنین مقاطع برای انتقال آب از سطح جاده به کنار جاده و طراحی کانال های زهکشی در کنار جاده مهم هستند. به طور مشابه، بعد Z خطوط عمود بر خط مرکز جاده از DSM استخراج می شود تا مقاطع عرضی جاده به راحتی و با دقت به دست آید (شکل 3 را ببینید).
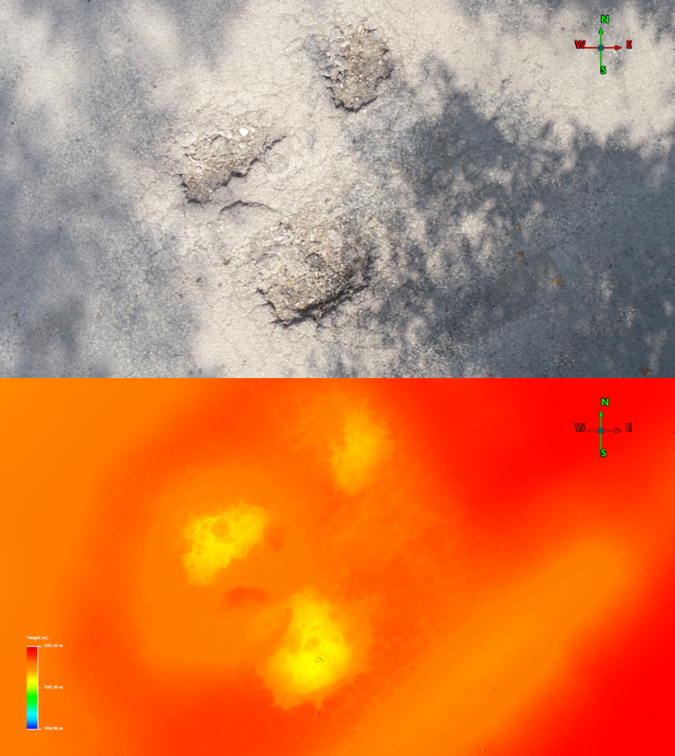
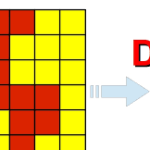
در نهایت، پریشانی جاده را می توان از ابرهای نقطه سه بعدی نیز تشخیص داد. تشخیص دقیق پریشانی جاده یک ورودی مهم برای اقدامات تعمیر و نگهداری است. نگهداری و تعمیرات به موقع باید انجام شود تا عمر سرویس جاده افزایش یابد و راحتی و ایمنی جاده برای رانندگان به حداکثر برسد.
علاوه بر این، تعمیرات و نگهداری به موقع ممکن است هزینه های طولانی مدت را کاهش دهد. روشها و تکنیکهای مختلف قادر به تشخیص خودکار پریشانی جاده هستند (شکل 4 را ببینید).
نتیجه گیری
پهپادها علاوه بر کاربرد در سایر رشتهها، در بررسی و تولید انواع اطلاعات بهروز جادهای اهمیت زیادی دارند. به طور خاص، استفاده از پهپادها در پروژههای جادهای در سالهای اخیر افزایش یافته است زیرا آنها میتوانند نقش مهمی در کنترل موجودی و ایمنی جادهها، بررسیهای مکرر زمین و تجزیه و تحلیل شبکههای جادهای پایدار، و نقشهبرداری و طرحریزی فعالیتها ایفا کنند.
استخراج خودکار اطلاعات با نرم افزارهای بسته کوچک و همچنین نرم افزارهای سنتی GIS بسیار موثر است. در نتیجه، امکان استخراج اطلاعات در مورد ساخت و ساز جاده، موجودی و محیط جاده از داده های مبتنی بر پهپاد وجود دارد. اجتناب ناپذیر است که در آینده نزدیک، استفاده از سیستم های پهپاد جایگاه خود را به عنوان یک روش اندازه گیری ضروری در ساخت و ساز جاده ها و تولید سایر اطلاعات جاده ای حفظ کند.





















نظرات کاربران